


Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Blynk was supported BLE (beta).
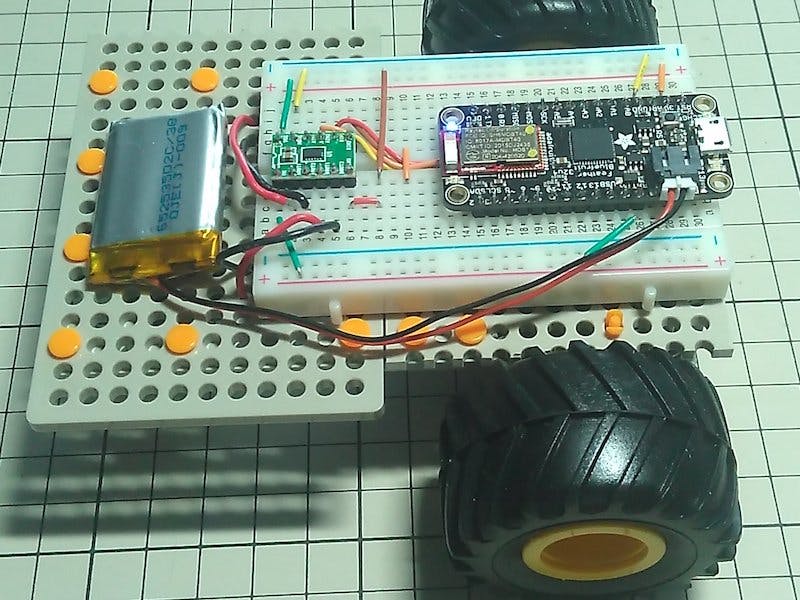
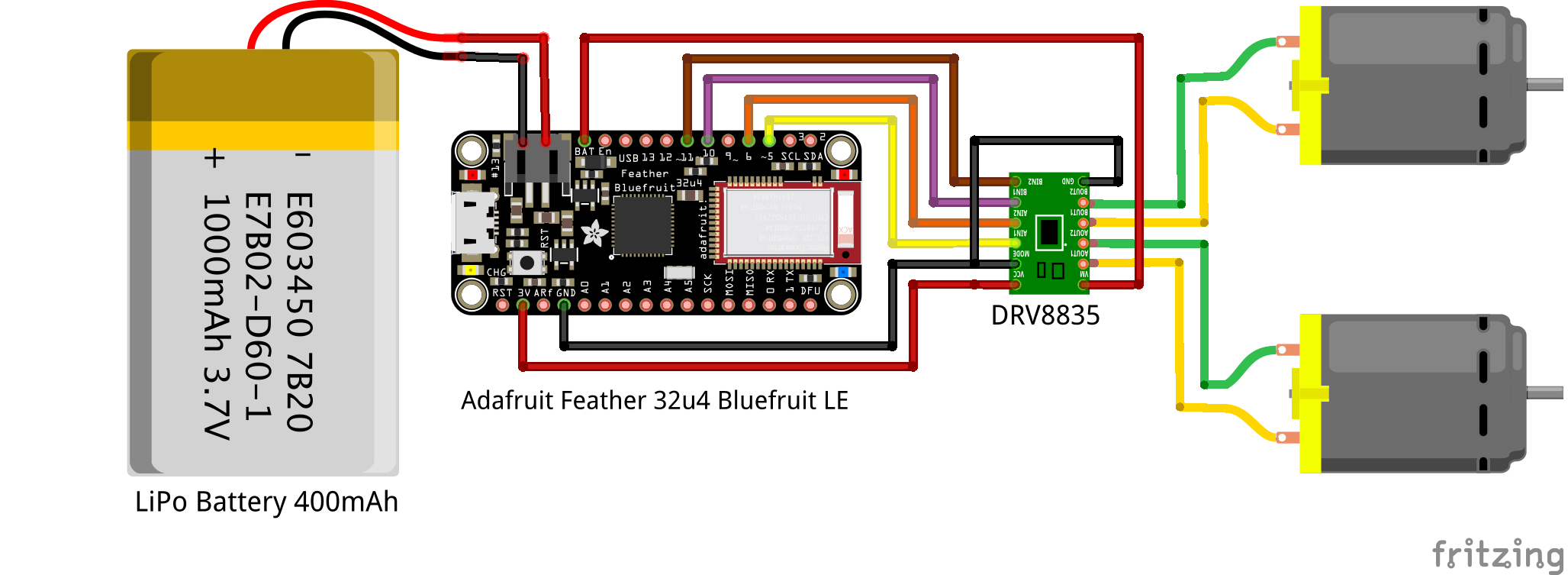
I use the BLE equipped microcomputer Adafruit Feather 32u4 Bluefruit LE and the motor driver DRV8835 to control the rotation of the two motors by Blynk.
1 / 2 • top
Latest library is located in the following.
https://github.com/blynkkk/blynk-library
Adafruit Feather 32u4 Bluefruit LE. is used. So, Arduino code is generated in reference to the following.
[Example] -> [Blynk] -> [Boards_BLE]-> [Adafruit_Feather_32u4_BLE]
Setting the Blynk1 / 3 • 1-1
- [1-1] Create a new project . Select the Arduino UNO in hardware, because there is no Adafruit Feather 32u4 BLE yet. AUTH TOKEN will make a note so you use at the time of Arduino code generation ( or to send mail ) .
- [1-2] Place the BLE widget and the joystick widget.
- [1-3] Joystick setting. The values of the two-axis are output in virtual pin V0. The values of X and Y are -255 to 255, respectively.
1 / 3 • 2-1
- [2-1] Click on the BLE widget of the project.
- [2-2] Click on the "Connect BLE device".
- [2-3] Then, conect to "Adafruit Bluefruit LE" by clicking "OK".
I can easily using Blynk!! Yattaaaaa!




_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)


{kind=link}
Comments
Please log in or sign up to comment.