



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 2 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
Hand tools and fabrication machines | ||||||
 |
| |||||
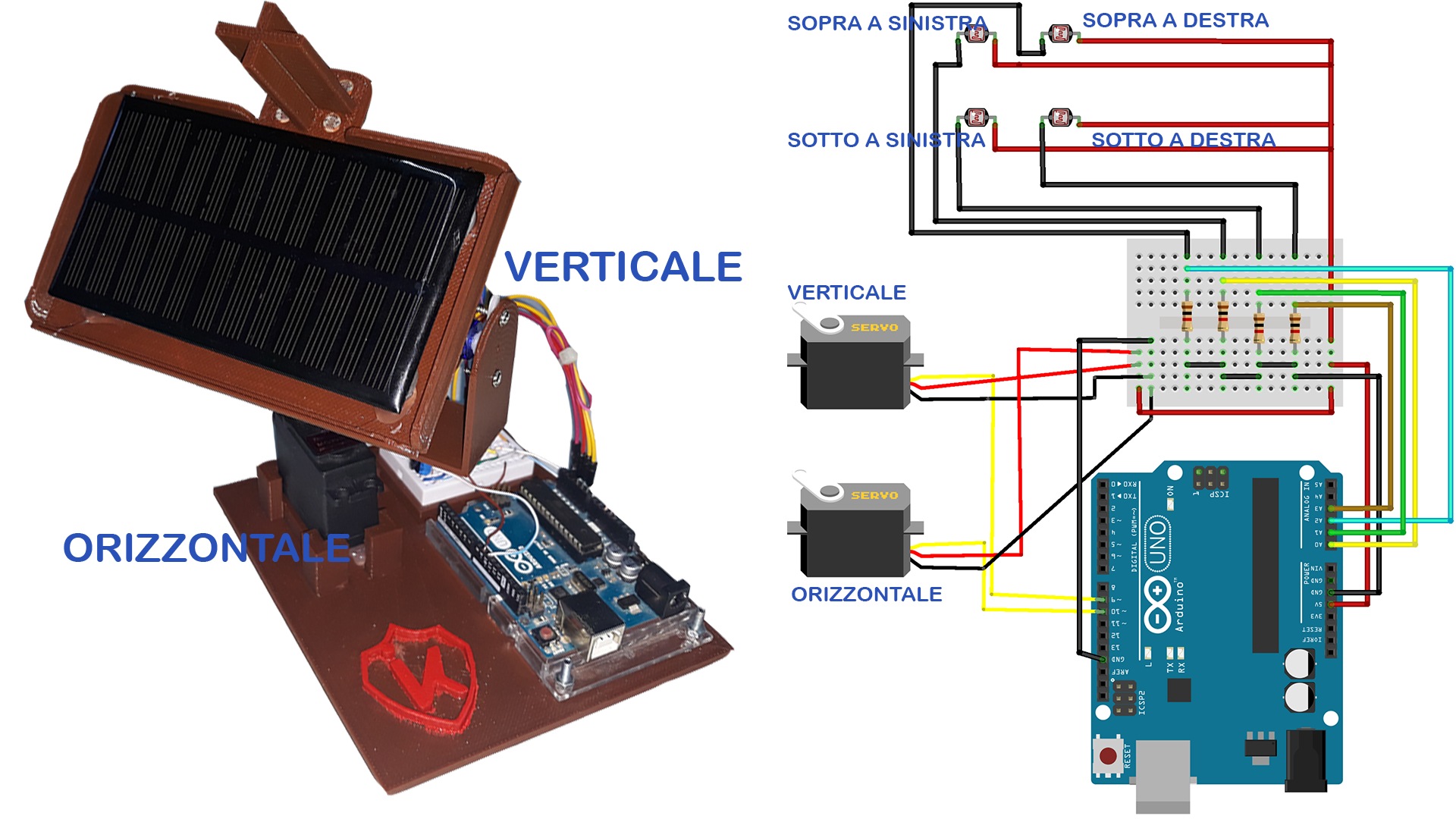
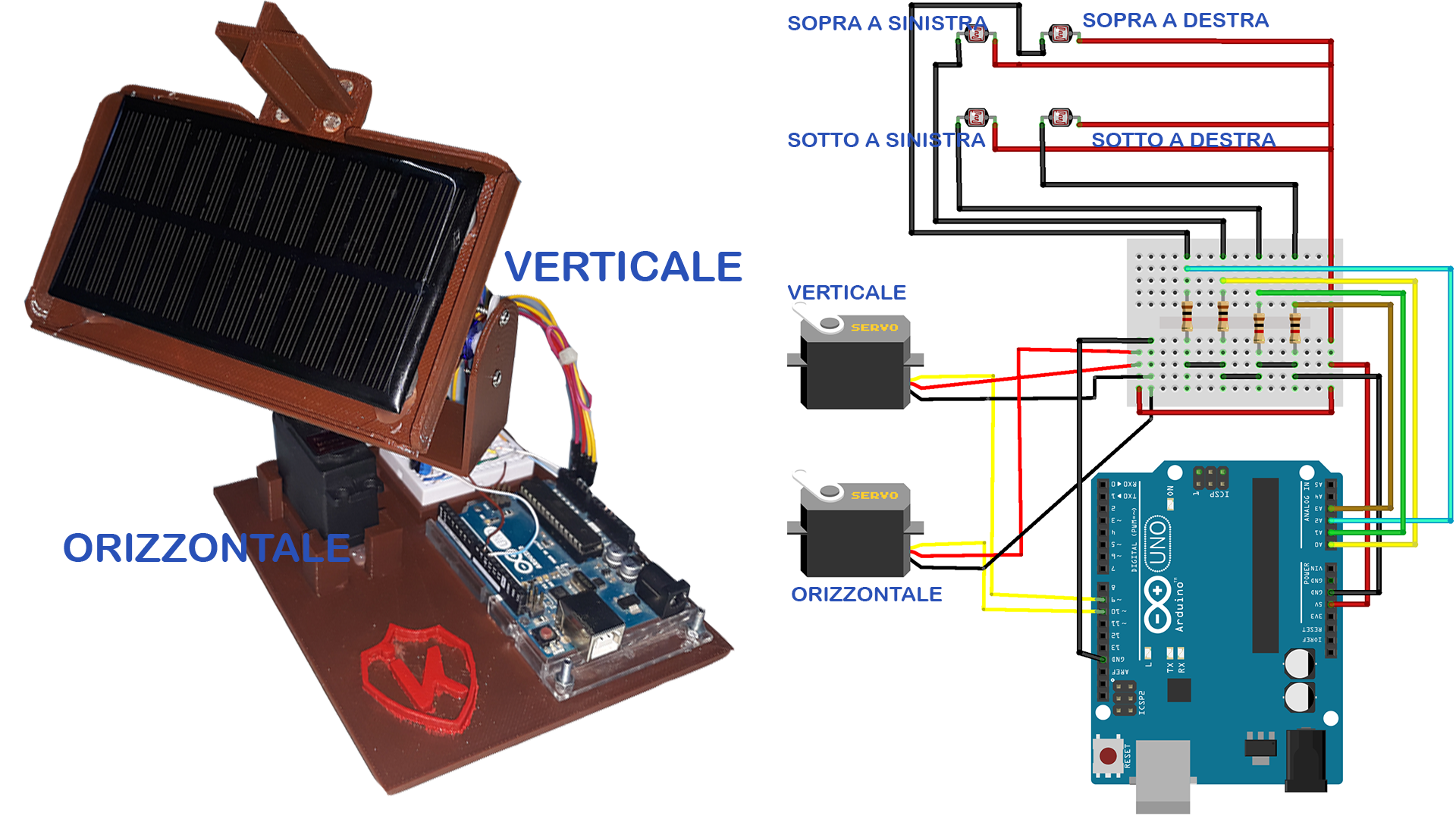
DIY Solar Tracker Arduino Project ITA
Read moreHi everyone, in this article we are going to make a Solar Tracker ("Solar Tracker") using Arduino. A solar tracker is a mechanical-automatic device that through sensors can understand the position of the Sun that thanks to the motors you can follow it so as to store more solar energy. Let's see how it builds !!
Needs:To carry out this project we need the following materials:
• Arduino UNO;
• 4 220 Ω resistors;
• 4 photoresistors;
• 2 Servomotors;
• Breadboard;
• Solar Panel ;
JOIN THE YOUTUBE CHANNEL = https://bit.ly/2Chdph2
For more information visit this website = http://www.ingeimaks.it/solartracker.html

14 projects • 46 followers
Giovanni Mannara is a Maker. Thanks to Massimo Banzi I have traversed this path of Digital Creator ... I LOVE ARDUINO !!!








{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.