


Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
This tank is my entry for the IDT Wireless Power challenge. The tank is a treaded vehicle which is controlled using the Particle Photon platform.
The project was initially set up to create an easy to print and build, remote controlled vehicle. It uses 2 9g Fitec servo's which are easy to come by. Optionally you can add 3 LEDs for a cool 'Knight Rider' effect.
Here is the first testing of the Tank and the 'Knight Rider' effect:
Furthermore, the tank is built to be easily extendable, providing a lot of mounting holes to add your own components.
One of these components is the IDT Wireless Power Receiver unit. This way you can drive around with the tank and when you are done, park it on a charging station, so you are good to go the next day.
To get your own tank, get the plans at Thingiverse.com and get them printed or print them yourself.
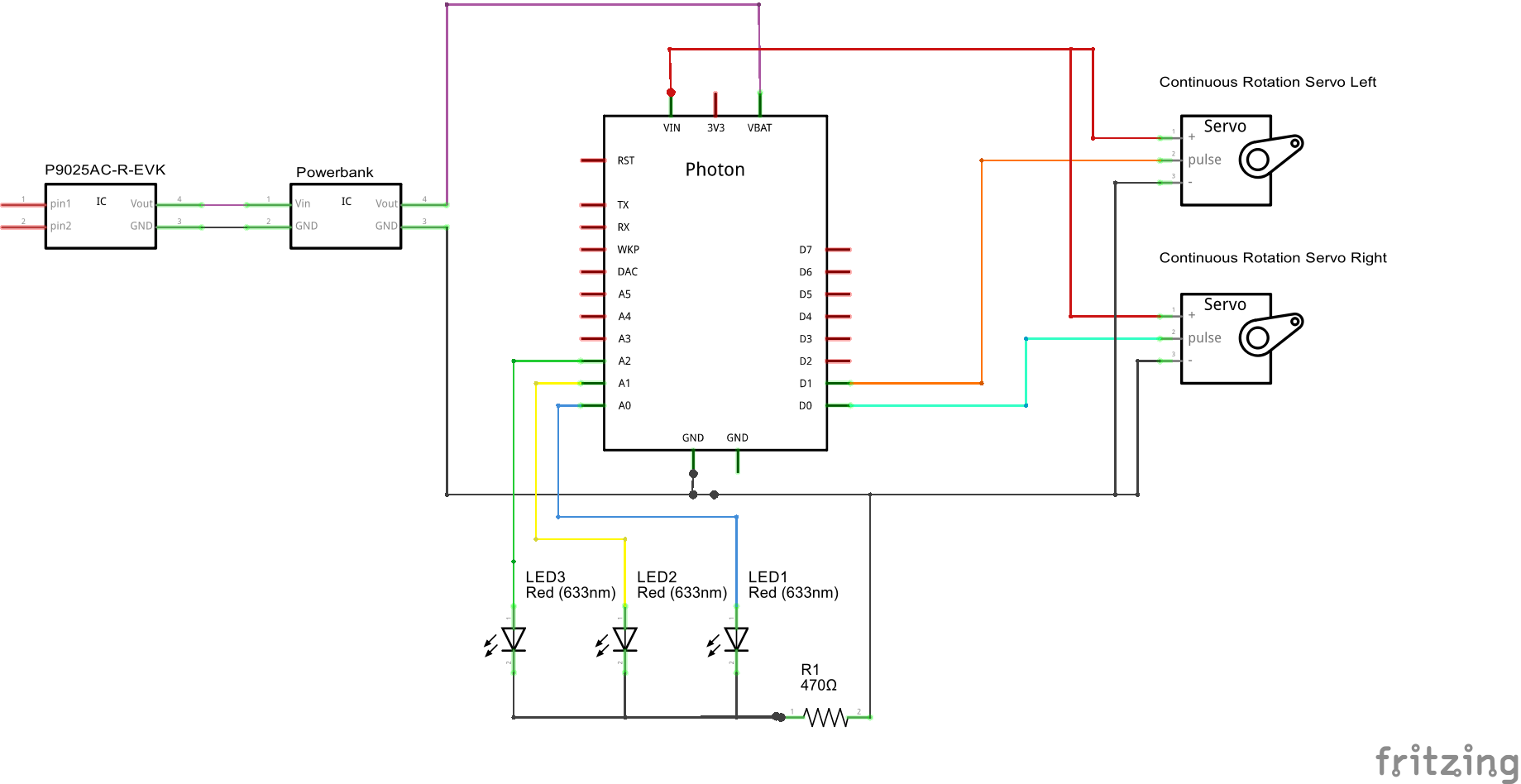
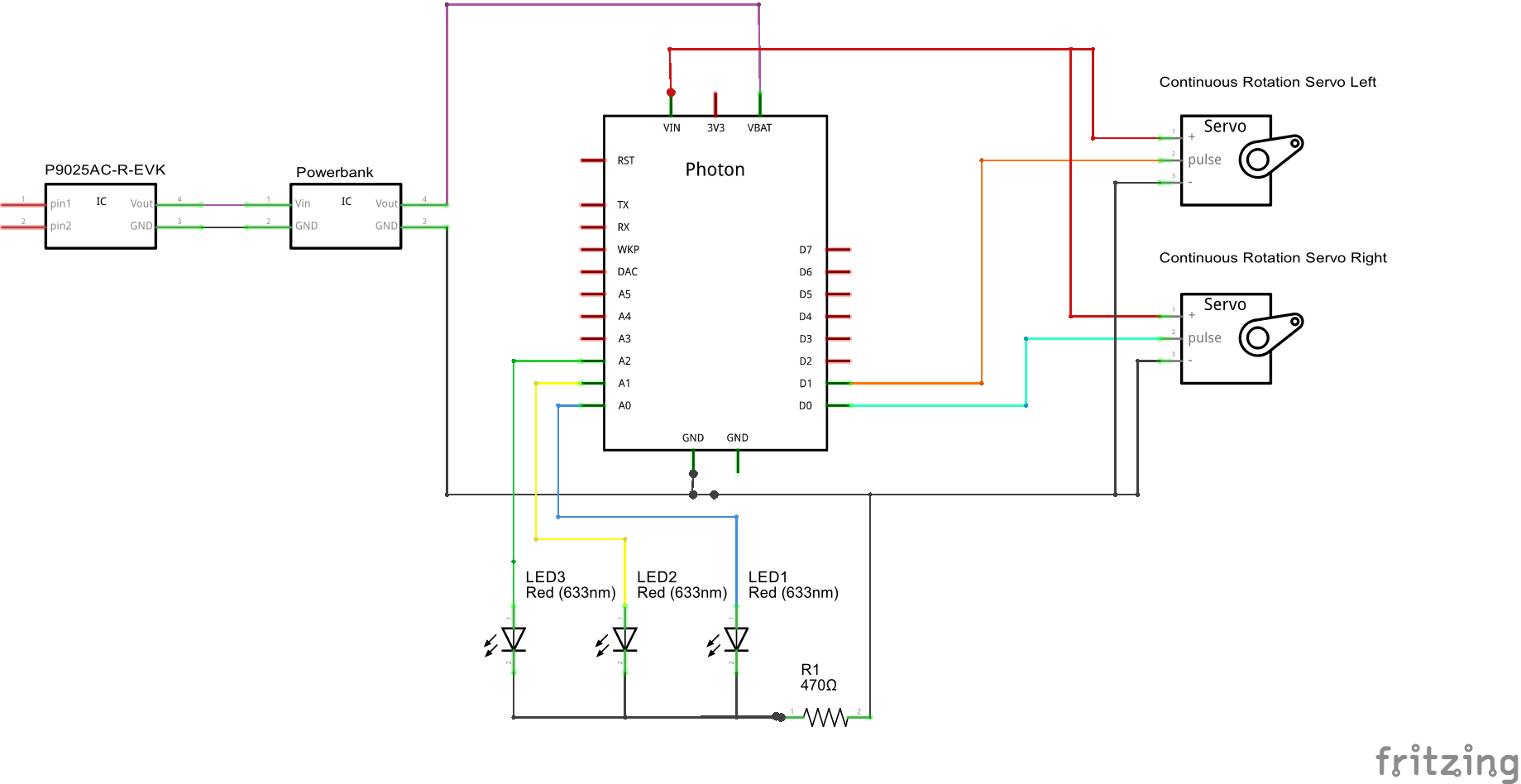
Connect the Photon with the LEDs, servo's and IDT Power Receiver and you and good to go.
All code is provided: you will need to flash your Photon with the provided code.
The Photon has a method provided which will receive an IP address and port, and then it will connect to there. Connecting to the Photon appears to have some problems, so that is why this method of working has been chosen.
The Photon will then listen to small commands: SL90 will set the left servo to move full speed forward, SL50 forward slower, SL-50, slow backwards.
Also the LEDs can be controlled in this way:
L01#W100#L11#W100#L21#W100#L00#W100#L10#W100#L20#W100#"
+ "L21#W100#L11#W100#L01#W100#L20#W100#L10#W100#L00#W100
will provided you with a 'Knight Rider' effect, for those who still know this.
The Visual Studio code allows you to run a console program which gets the commands from an XBox controller, it is fun to drive around with this. But you can also command it from your own program.
Here is my son driving the tank:
And most importantly: the IDT Receiver can be bolted under the tank, so you can drive around, park it on the sender and be ready to go in the morning.







{kind=link}
Comments
Please log in or sign up to comment.