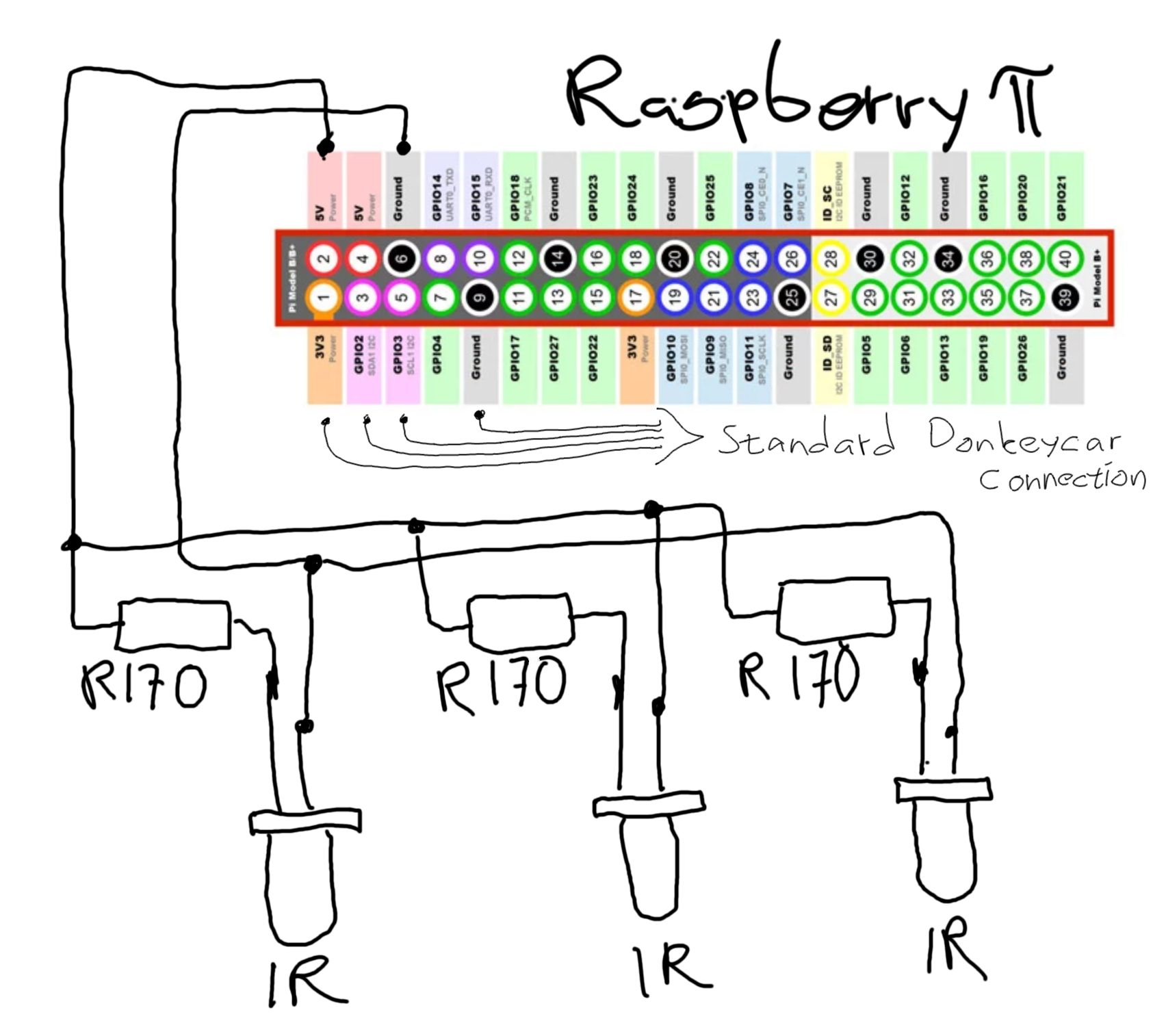
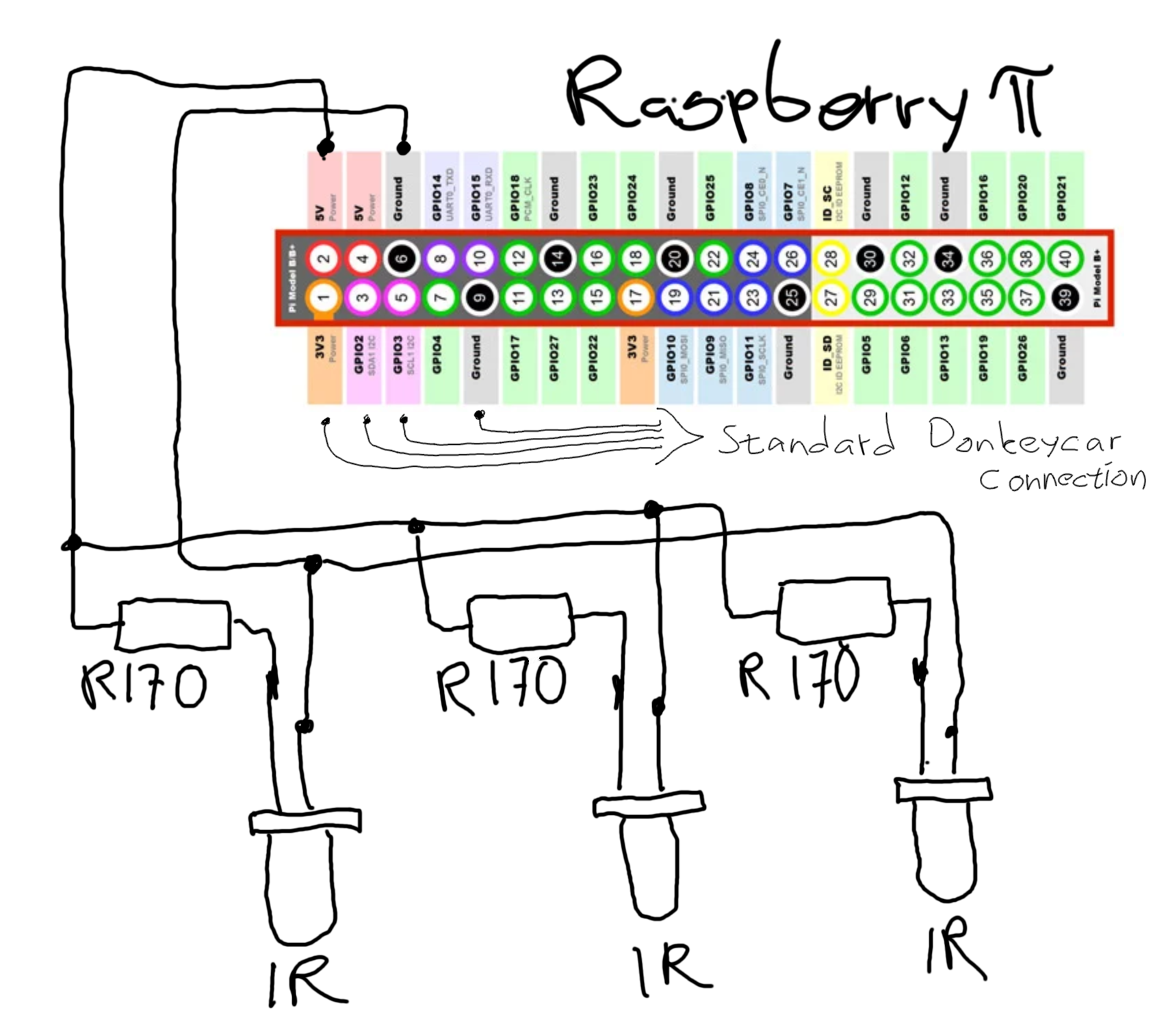
I used 170 ohm, which should give some 20 mA at 5V
×
3
Generic jumper wires
×
1
General hobby items
I've used a popsicle stick and some iron thread.
×
1
Hand tools and fabrication machines
Generic soldering tools
Story
The final product will be a vehicle which travels in the summer night trapping ticks in an environmet that people use daytime. The project relies heavily on products already developed by other people, i.e. a Donkeycar with all great software, and a special blanket developed in Finland for catching ticks.
I found out that the Donkeycar model that I have has way too much speed for my project. That leads to way too little torque on slow speeds. Therefore I will concentrate on getting the Donkeycar work in the dark, not yet adapting it to the actual tick chasing rover, which need to be very slow and needs more torque. I will transfer the Raspberry Pi, the camera and the motor driver to another, slower car chassis, but I will leave that to a later moment.
The Donkeycar
Assemble the car according to the guides made by the manufacturer, but remember to attach the Noir camera instead of the standard one. Attach also the led lights, using your imagination. You might want to leave long legs for them, so you can aim the beam while looking at the video stream.
Note that the Noir camera used in this project works just like the standard Raspberry Pi camera.
The Noir camera attached to the Donkeycar
Three IR leds. A popsickle stick and some iron wire.
5 V power and ground taken from the Raspbery Pi for the IR leds
Noir vs. phone camera
A smartphone camera is a typical digital camera, which has an infrared filter. If you aim your camera straight into a remote control IR emitter, you can actually see the light through your camera. A typical digital camera sensor senses infrared and treats it like visible light. Therefore most cameras have this infrared filter. But the Raspberry Pi Noir camera hasn't. Using strong infrared emitters will show on images taken with the Noir camera.
Examples
Image taken with my phone, lights on in the room
What the Noir saw at same moment. Note the three pale flares.
Image taken with my phone with room lights off.
What the Noir saw at the same moment.
Test ride in a dark room
Screen capture video from the Donkey Monitor. The lights should aimed a bit lower.
The video shows that the camera needs more light from the IR leds. What I used was three "super-bright IR leds". I used a 170 ohm resistor, according to some advice I found on the net.
Conclusion
The Donkeycar chassis would be perfect, if the gearbox ratio could be altered
Three super-bright IR leds are not enough. Either should the resistors be changed to lower ones or the number of leds should be increased.
The weaker the lights are, the more important it is to aim them lower, just above the bottom edge of the camera view.
What next
Replace the fast Donkeycar with a slower one
Improve the brightness of the infrared lights
Move on to optimising the track marking, using infrared reflecting material







{kind=link}
Comments