



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
This is a really fun and easy project that can be done in about an hour. On the bottom of the skateboard is an accelerometer/gyro with an Arduino board that transmits the angular motion of the board via Bluetooth to a little VR game I made in Unity for Android phones. So, when you turn on your Arduino and the bluetooth connects with your phone, you start moving forward. Lean left and you go left, lean right and you go right. Lift up the front wheels and your character will jump. This only works for Android phones and your phone must be compatible with Google Cardboard. So, if you have an old skateboard laying around, turn it into a virtual reality snowboard. Here's how:
You will need:A Google Cardboard style virtual reality headset.
A skateboard.
4 tennis balls (to keep from rolling away)
An Arduino Leonardo (or Uno)
Some jumper wires
A mini breadboard
An HC-06 Bluetooth module
An MPU-6050 accelerometer/gyro
A 9V battery with battery box that has a on/off switch and a barrel plug (to power the Arduino board)
A soldering iron and maybe a hot glue gun
The Android app, Arduino code, and parts list with links can be found here:
http://wirebeings.com/virtual-reality-skateboard.html
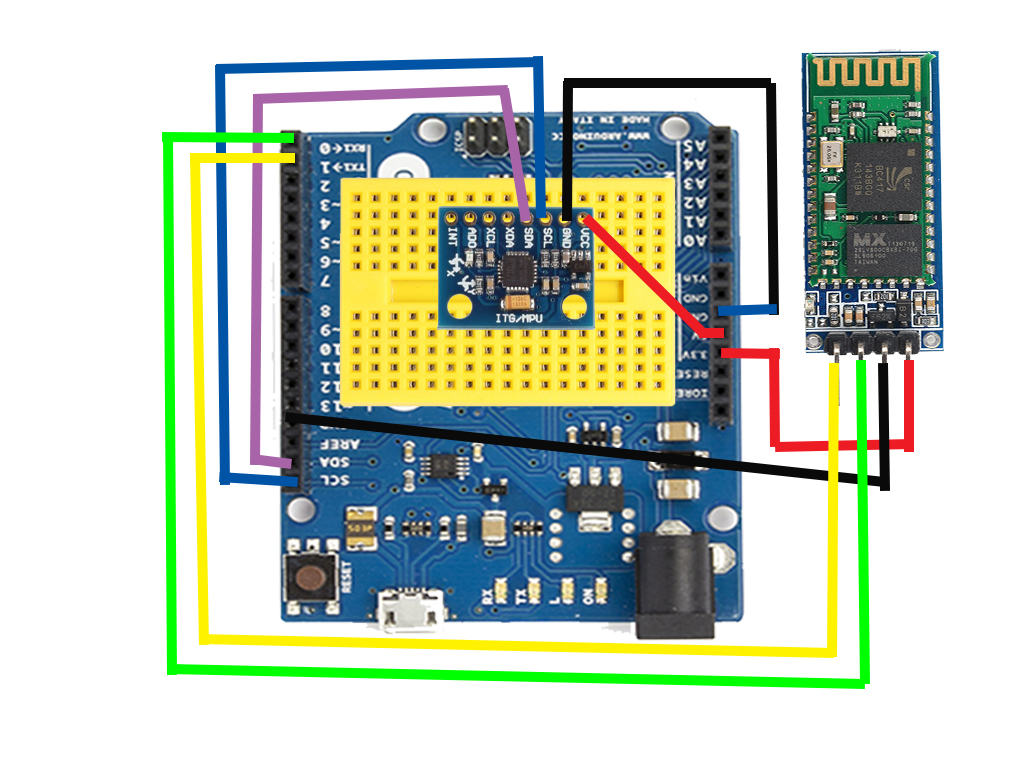
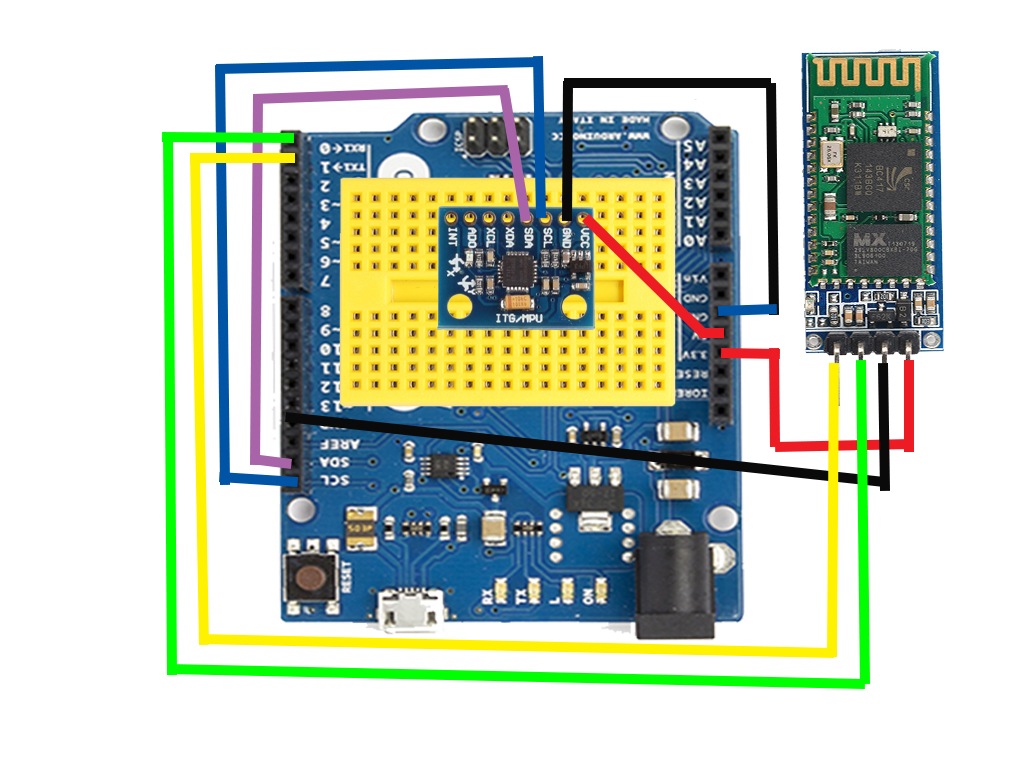
Step 1: Create your Arduino Device/Transmitter/Input/ThingAssemble your device as shown in the picture above.
You will need to solder the header pins onto the MPU-6050, if your soldering iron is new and the tip is clean this can be done in about 11 seconds. If your soldering iron tip is dirty and old this will quickly become the hardest thing you have ever done (speaking from experience).
Make sure the orientation of everything is exactly as shown in the pictures above so you do not have to get into the code and edit anything.
Attach everything to you skateboard EXACTLY as shown (really just make sure the MPU6050 is facing the same direction as the picture)
Here I glued the battery box to the board with hot glue and screwed the Arduino board down. I used an old school board because a wider board is better for the purposes of this experience. It is pretty hard to balance on a board while in virtual reality.
NOTE: The Leonardo works much better for this...however...
If you are using an Arduino Uno all the connections are the same except:
SDA goes to A4 and SCL goes to A5
Step 2: Upload the Arduino code to your Device / Transmitter / Input ThingIMPORTANT: Unplug the RX and TX pins before uploading the code to your board.
Follow this link and download the app to your phone.
Google Cardboard Virtual Reality Skateboard/Snowboard App
You will need to go into your security settings and allow apps to be installed from unknown developers.
Make sure to pair the Bluetooth module to your phone, do not change the default name (HC-06). The password should be 1234.
Notes:
This is my first Unity Game...so it's pretty basic.
If enough people make this I can try to make a better snowboard game, or make an actual skateboard game depending on what I get requests for.
When your turn on your Arduino device make sure the skateboard is flat on the ground and then open the app. As soon as the Bluetooth connects you will drop in.
If the Bluetooth becomes disconnected, restart the app (it is set to connect at the start of the app only, for right now).





{kind=link}
Comments
Please log in or sign up to comment.