



Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Microplastics threaten aquatic life all around the globe. In seas, rivers and lakes, man made material is making its way into the Earth's waterways and ecosystems. Microplastic pollution causes death and serious health problems for aquatic life and humans. Therefore, we must remove these pollutants every way we can. Due to the large scale nature of the microplastics problem, it's important to consider ways in which this process can be automated and accelerated.
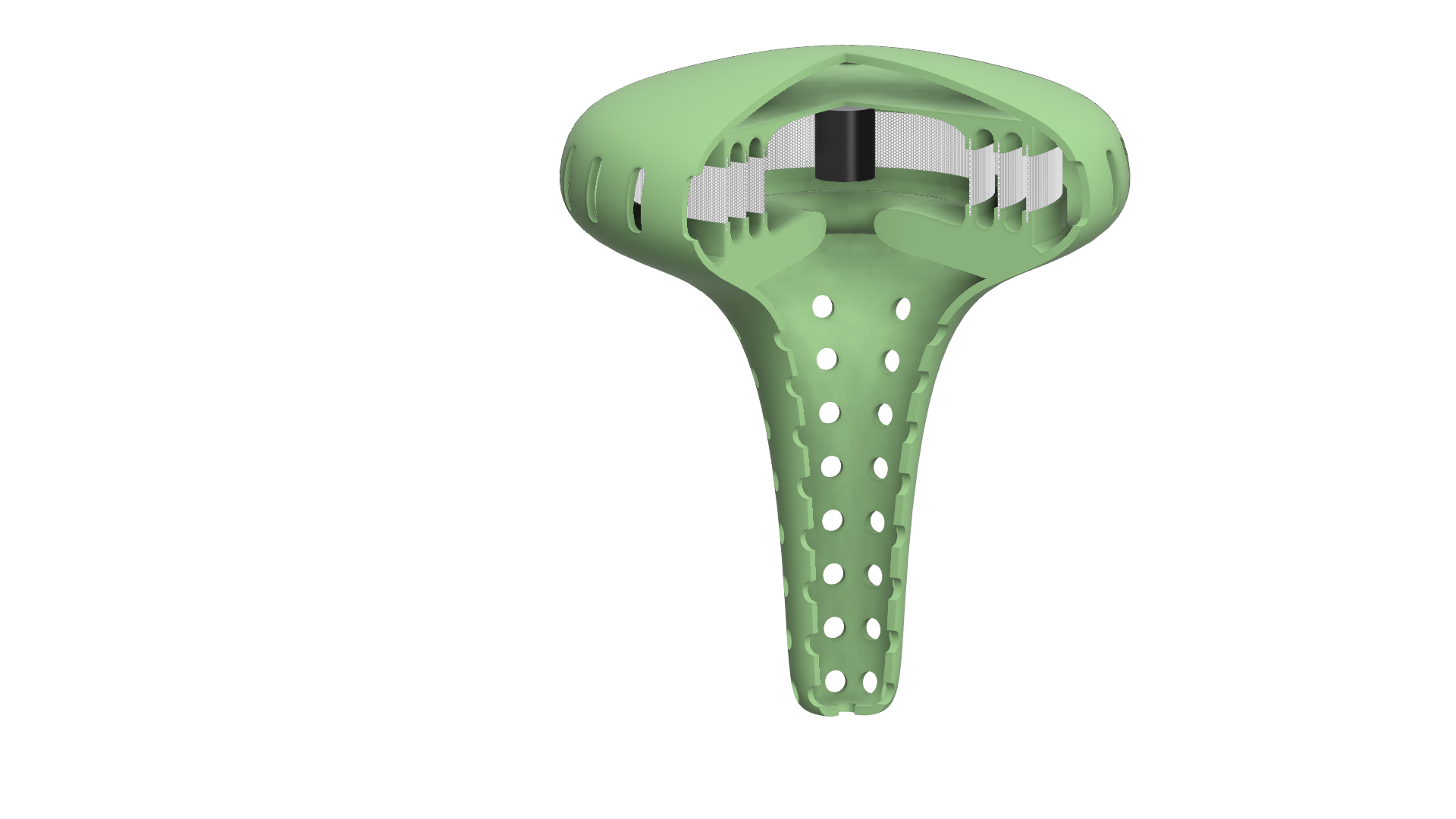
Concept & DesignThis device aims to suck up water and push it through a filter which catches microplastics adn then reintroduces then filtered water back into the environment. It works using a long water intake which extends down into the water. This intake pulls in water though a centrifugal impeller attached to a DC motor. The impeller exerts the water radialy though a layered filter. This filter will catch plastics ranging from 90 to 1000 μm (micron) in size using 3 cylindrical meshes. The filtered water then escapes through the outlets that surrounf the filter. The motor is controlled using a PSoDC and switch shield to supply current to the motor during operation.
Coarse Filter (for Macroplastics and Mesoplastics): A coarse filter with a pore size of around 1 millimeter (1000 micrometers) can capture larger microplastics and mesoplastics, which are typically in the range of 1 to 5 millimeters in size. This filter will help collect visible plastic debris in the water.
Medium Filter (for Microplastics): A medium filter with a pore size of around 500 micrometers can capture smaller microplastics. This size range includes most microplastics commonly found in the environment.
Fine Filter (for Nanoplastics): To capture the smallest microplastics, such as nanoplastics, you need a filter less than 0.1 millimeter (100 micrometers) in size.
This project uses 3 meshes, an initial 1000 μm metal filter, and two additional nylon filters, 550 μm and 90 μm.
This project uses the PSoC™ 62S2 Wi-Fi BT Pioneer Kit with the Infineon High-Side-Switch Shield with PROFET +2 12V BTS700x-1EPP to control the motor, essentialy acting as a relay to provide power to the motor and spin up impeller. The PSoC is powered by lipo battery which also supplies the motor. The MCU will switch on the motor for a given amount of time throughout the day to perfrom this filtering cycle.
Furthermore, if the HSS detects high current pull from the motor, it would suggest a filter blockage or obstruction and the motor will be turned off and the system will enter an error state. Perhaps attempting to spin the motor up after a given interval to see if the current pull is still high, and the blockage persists. When the device is connected to the internet or bluetooth device, this alert state can be communicated so the user can manually remove the blockage.
Future WorkUnfortunatly this project is far from complete! I have just started my PhD so my maker/hobby time has been very limited. The library for this project is still in development and may not be finished by the time this competition is over, however the github will still be linked just incase! I also want to add a flow sensor using the hall sensor shield with a mechanical gate that can be used to sense flowrate and allow for better sensign of intake blockages. I'm excited to contiue this project over the winter when I have some time around Christmas!

_t9PF3orMPd.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)








{kind=link}
Comments
Please log in or sign up to comment.