Version 2 is the further development of a Hot Wheel Race Judge/Timer. This version includes a Elapsed Time (ET) like a real drag strip.
My work was planning a team building event, a Lunch Hour Hot Wheels Tournament. Two race brackets, Single knock out. To avoid any arguments, bad feelings and wrong doing's, I offering to make a electronic finish line judge. I knew the Arduino would do the trick! Over a span of a couple weeks I went from prototype to a slick working model ready for race day!
The course was 20ft long with the finish line judge at the end! We had 26 cars enter the event. Winner gets a trophy and bragging rights! It took the entire lunch hour to get to the final 2 cars. The final race was won by a half a car length... to close for the naked eye to tell!
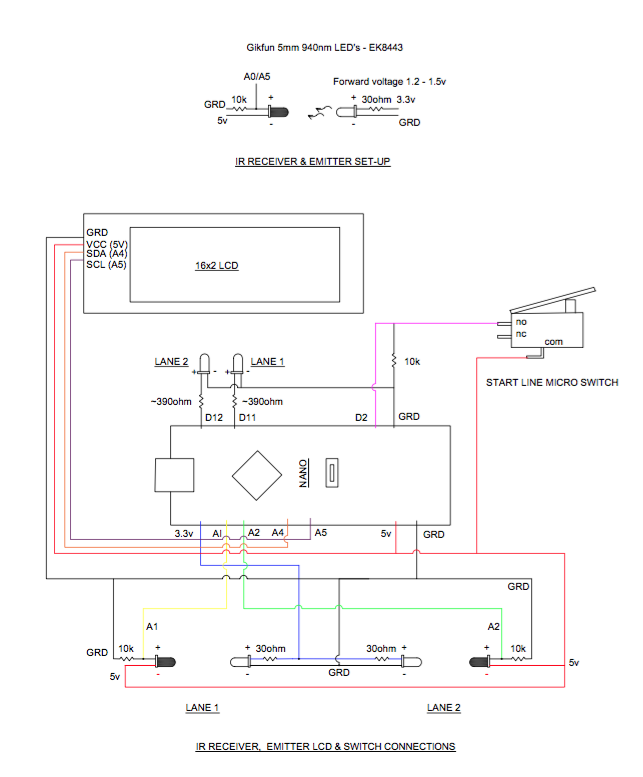
The project is based around the Arduino Nano, LCD screen and Gikfun IR LED emitter and receiver. These are readily available online and are easy to mount, install and wire up.
The timer starts as soon at the race gate switch is triggered. The time stops as soon as each car breaks the finish line beam. The Elapsed Time (ET) is calculated form that.
As soon as the cars breaks the IR beam the time is stoped for each lane. The timer then waits till the second car to finished. The system then awards the winner and calculates/displays the ET for both lanes. The winner LED remains on for 5 seconds then the device resets by itself and is ready to go again. There is no need to press a reset button. This makes it easy for kids to play for seamless non-confrontational action!
The IR LED emitter is powered by the 3.3V and the IR receiver is powered by the 5v from the board. The IR receivers are constantly reading a "HIGH" value until an object (a die-cast car) breaks the beam making it read "LOW". Once "LOW" is triggered, the top mounted LED for winning lane lights up.
The device is stand-alone and can be placed anywhere along the track. There is no need to modify a section of track to make it work.















{kind=link}
Comments
Please log in or sign up to comment.