Before anything, at the beginning of the work, we need to install the NI Visa Driver software package. By using this software package, we can use serial communication in LabVIEW. you can find NI Visa driver in this link. After installation, we can easily send control commands to the Raspberry Pi Pico microcontroller through Bluetooth communication. To better understand this article, you should see the block diagram of LabVIEW program. You can go to my GitHub account to see the complete source of the program written in LabVIEW. In addition to controlling the robot, you can also show video through the LabVIEW graphical panel. I used an Android smartphone to send video to the LabVIEW app. Also, to view the video in LabVIEW, you must install the NI Vision Acquisition software package. you can download NI Vision from this link. After writing the control program in LabVIEW, we have to write a program in MicroPython language for Raspberry Pi Pico microcontroller, this program is very simple and there is no special point about it. You can download this program from my GitHub account. The complete video for programming this robot is given below.
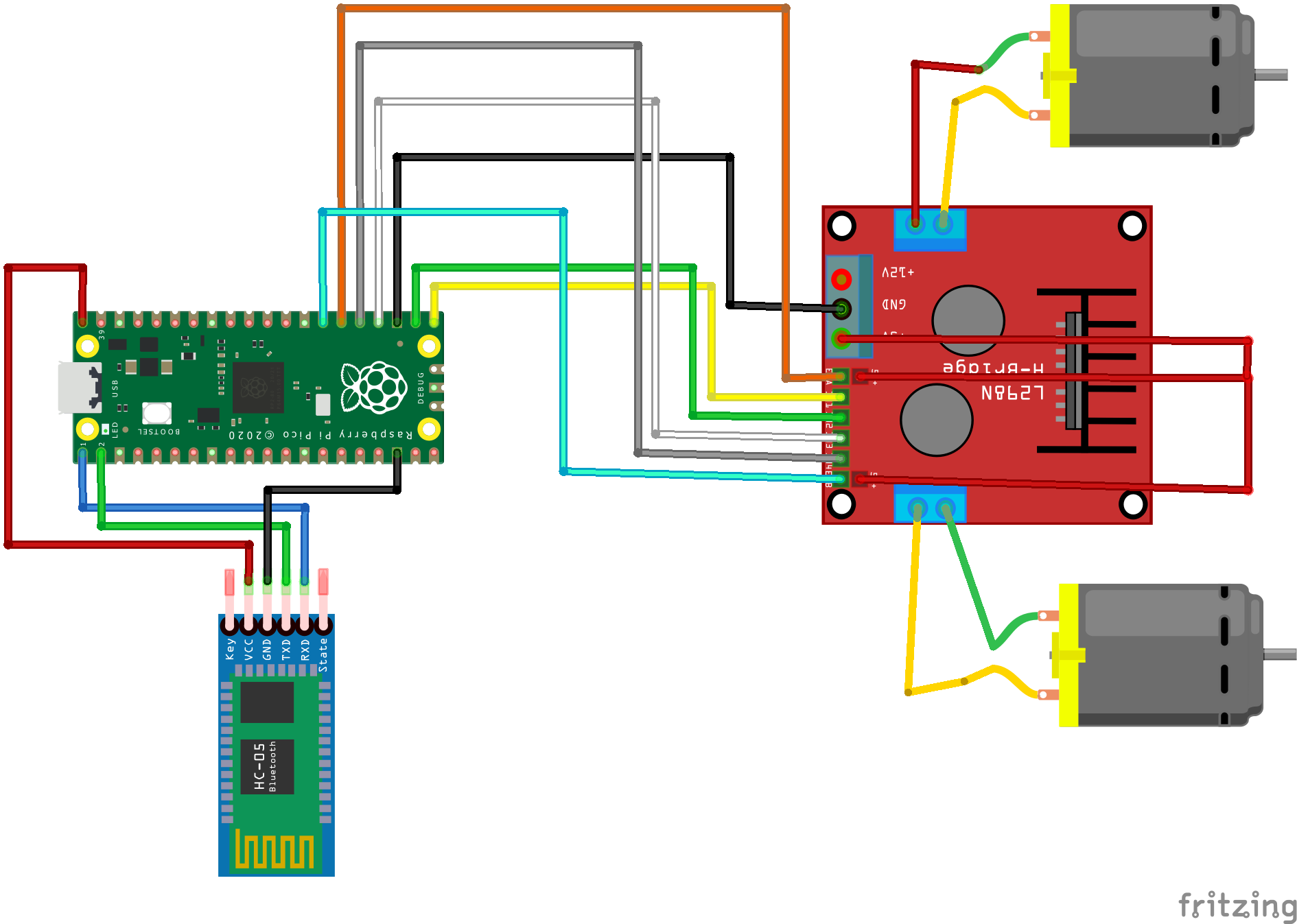
There is nothing special about the hardware of this robot and you can easily assemble this robot by looking at the electronic circuit schematic.














_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments