



Hardware components | ||||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Aim
Read moreTo create a warning system that activates whenever persons come within 2m of the wearer of distancing badge
More stuff coming soon...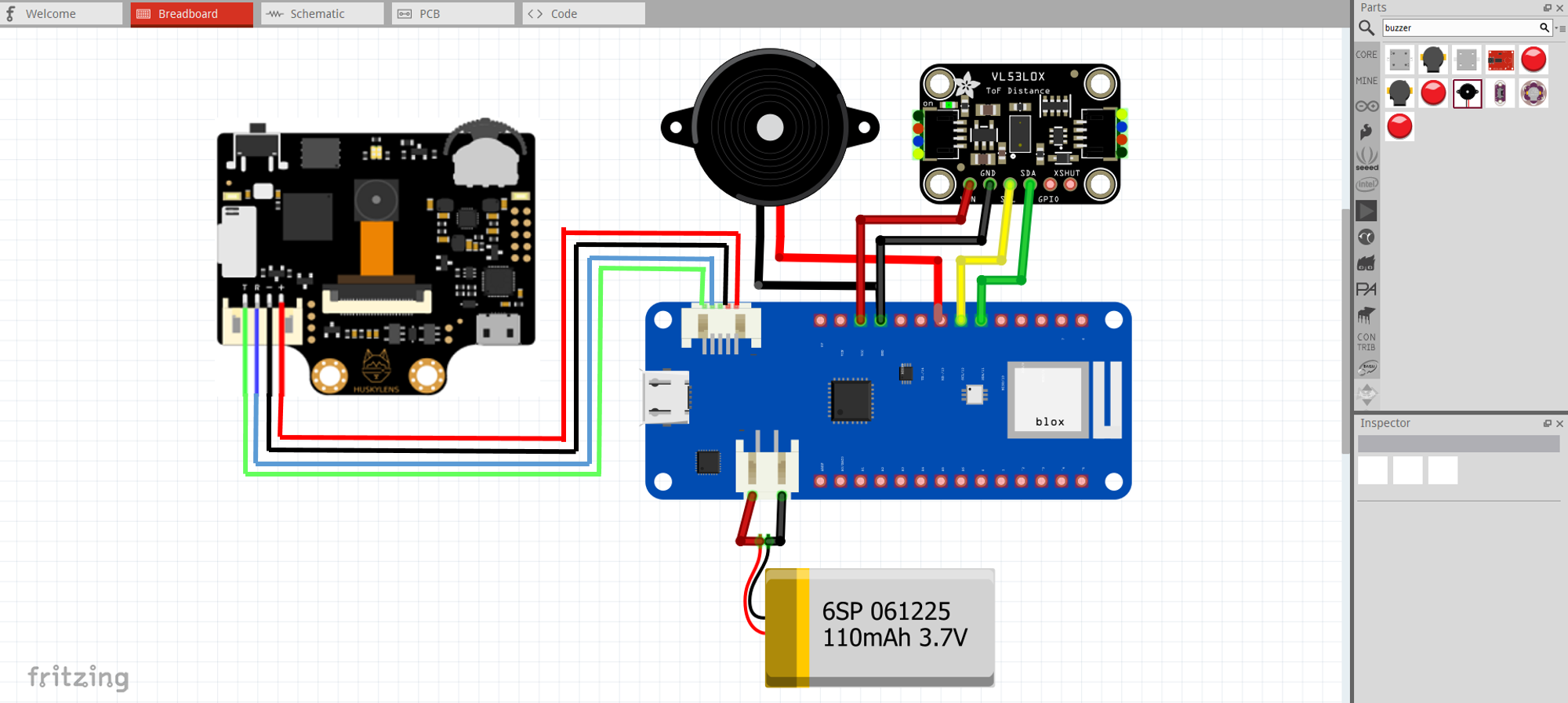
{kind=link}
/****************************************
* Include Libraries
****************************************/
#include "UbidotsESPMQTT.h"
/****************************************
* Define Constants
****************************************/
#define TOKEN "BBFF-HQzhjmDxosWtw94dhMISDcaLpZAzxK" // Your Ubidots TOKEN
#define WIFINAME "Moinak" //Your SSID
#define WIFIPASS "lklklklk" // Your Wifi Pass
Ubidots client(TOKEN);
/****************************************
* Auxiliar Functions
****************************************/
void callback(char* topic, byte* payload, unsigned int length) {
Serial.print("Message arrived [");
Serial.print(topic);
Serial.print("] ");
for (int i=0;i<length;i++) {
Serial.print((char)payload[i]);
}
Serial.println();
}
/****************************************
* Main Functions
****************************************/
void setup() {
// put your setup code here, to run once:
//client.ubidotsSetBroker("business.api.ubidots.com"); // Sets the broker properly for the business account
client.setDebug(true); // Pass a true or false bool value to activate debug messages
Serial.begin(115200);
client.wifiConnection(WIFINAME, WIFIPASS);
client.begin(callback);
}
void loop() {
// put your main code here, to run repeatedly:
if(!client.connected()){
client.reconnect();
}
float value1 = analogRead(0);
//float value2 = analogRead(2)
client.add("temperature", value1);
//client.add("status", value2);
client.ubidotsPublish("my-new-device");
client.loop();
}
// This example retrieves last value of a variable from the Ubidots API
// using HTTP protocol.
/****************************************
* Include Libraries
****************************************/
#include "Ubidots.h"
/****************************************
* Define Constants
****************************************/
const char* UBIDOTS_TOKEN = "..."; // Put here your Ubidots TOKEN
const char* WIFI_SSID = "..."; // Put here your Wi-Fi SSID
const char* WIFI_PASS = "..."; // Put here your Wi-Fi password
const char* DEVICE_LABEL_TO_RETRIEVE_VALUES_FROM = "weather-station"; // Replace with your device label
const char* VARIABLE_LABEL_TO_RETRIEVE_VALUES_FROM = "humidity"; // Replace with your variable label
Ubidots ubidots(UBIDOTS_TOKEN, UBI_HTTP);
/****************************************
* Auxiliar Functions
****************************************/
// Put here your auxiliar functions
/****************************************
* Main Functions
****************************************/
void setup() {
Serial.begin(115200);
ubidots.wifiConnect(WIFI_SSID, WIFI_PASS); // ubidots.setDebug(true); //Uncomment this line for printing debug messages
}
void loop() {
/* Obtain last value from a variable as float using HTTP */
float value = ubidots.get(DEVICE_LABEL_TO_RETRIEVE_VALUES_FROM, VARIABLE_LABEL_TO_RETRIEVE_VALUES_FROM);
// Evaluates the results obtained
if (value != ERROR_VALUE) {
Serial.print("Value:");
Serial.println(value);
}
delay(5000);
}
// This example sends data to multiple variables to
// Ubidots through HTTP protocol.
/****************************************
* Include Libraries
****************************************/
#include "Ubidots.h"
/****************************************
* Define Instances and Constants
****************************************/
const char* UBIDOTS_TOKEN = "..."; // Put here your Ubidots TOKEN
const char* WIFI_SSID = "vardhan128"; // Put here your Wi-Fi SSID
const char* WIFI_PASS = "shiella21"; // Put here your Wi-Fi password
Ubidots ubidots(UBIDOTS_TOKEN, UBI_HTTP);
/****************************************
* Auxiliar Functions
****************************************/
// Put here your auxiliar functions
/****************************************
* Main Functions
****************************************/
void setup() {
Serial.begin(115200);
ubidots.wifiConnect(WIFI_SSID, WIFI_PASS);
// ubidots.setDebug(true); // Uncomment this line for printing debug messages
}
void loop() {
float value1 = random(0, 9) * 10;
float value2 = random(0, 9) * 100;
float value3 = random(0, 9) * 1000;
ubidots.add("Variable_Name_One", value1); // Change for your variable name
ubidots.add("Variable_Name_Two", value2);
ubidots.add("Variable_Name_Three", value3);
bool bufferSent = false;
bufferSent = ubidots.send(); // Will send data to a device label that matches the device Id
if (bufferSent) {
// Do something if values were sent properly
Serial.println("Values sent by the device");
}
delay(5000);
}
#include "HUSKYLENS.h"
#include "SoftwareSerial.h"
HUSKYLENS huskylens;
//HUSKYLENS green line >> SDA; blue line >> SCL
void printResult(HUSKYLENSResult result);
void setup() {
Serial.begin(115200);
Wire.begin();
while (!huskylens.begin(Wire))
{
Serial.println(F("Begin failed!"));
Serial.println(F("1.Please recheck the \"Protocol Type\" in HUSKYLENS (General Settings>>Protocol Type>>I2C)"));
Serial.println(F("2.Please recheck the connection."));
delay(100);
}
}
void loop() {
if (!huskylens.request()) Serial.println(F("Fail to request data from HUSKYLENS, recheck the connection!"));
else if(!huskylens.isLearned()) Serial.println(F("Nothing learned, press learn button on HUSKYLENS to learn one!"));
else if(!huskylens.available()) Serial.println(F("No block or arrow appears on the screen!"));
else
{
Serial.println(F("###########"));
while (huskylens.available())
{
HUSKYLENSResult result = huskylens.read();
printResult(result);
}
}
}
void printResult(HUSKYLENSResult result){
if (result.command == COMMAND_RETURN_BLOCK){
Serial.println(String()+F("Block:xCenter=")+result.xCenter+F(",yCenter=")+result.yCenter+F(",width=")+result.width+F(",height=")+result.height+F(",ID=")+result.ID);
}
else if (result.command == COMMAND_RETURN_ARROW){
Serial.println(String()+F("Arrow:xOrigin=")+result.xOrigin+F(",yOrigin=")+result.yOrigin+F(",xTarget=")+result.xTarget+F(",yTarget=")+result.yTarget+F(",ID=")+result.ID);
}
else{
Serial.println("Object unknown!");
}
}
#include "HUSKYLENS.h"
#include "SoftwareSerial.h"
HUSKYLENS huskylens;
SoftwareSerial mySerial(10, 11); // RX, TX
//HUSKYLENS green line >> Pin 10; blue line >> Pin 11
void printResult(HUSKYLENSResult result);
void setup() {
Serial.begin(115200);
mySerial.begin(9600);
while (!huskylens.begin(mySerial))
{
Serial.println(F("Begin failed!"));
Serial.println(F("1.Please recheck the \"Protocol Type\" in HUSKYLENS (General Settings>>Protocol Type>>Serial 9600)"));
Serial.println(F("2.Please recheck the connection."));
delay(100);
}
}
void loop() {
if (!huskylens.request()) Serial.println(F("Fail to request data from HUSKYLENS, recheck the connection!"));
else if(!huskylens.isLearned()) Serial.println(F("Nothing learned, press learn button on HUSKYLENS to learn one!"));
else if(!huskylens.available()) Serial.println(F("No block or arrow appears on the screen!"));
else
{
Serial.println(F("###########"));
while (huskylens.available())
{
HUSKYLENSResult result = huskylens.read();
printResult(result);
}
}
}
void printResult(HUSKYLENSResult result){
if (result.command == COMMAND_RETURN_BLOCK){
Serial.println(String()+F("Block:xCenter=")+result.xCenter+F(",yCenter=")+result.yCenter+F(",width=")+result.width+F(",height=")+result.height+F(",ID=")+result.ID);
}
else if (result.command == COMMAND_RETURN_ARROW){
Serial.println(String()+F("Arrow:xOrigin=")+result.xOrigin+F(",yOrigin=")+result.yOrigin+F(",xTarget=")+result.xTarget+F(",yTarget=")+result.yTarget+F(",ID=")+result.ID);
}
else{
Serial.println("Object unknown!");
}
}
/*!
* @file HUSKYLENS.h
* @brief HUSKYLENS - An Easy-to-use AI Machine Vision Sensor
* @n Header file for HUSKYLENS
*
* @copyright [DFRobot]( http://www.dfrobot.com ), 2016
* @copyright GNU Lesser General Public License
*
* @author [Angelo](Angelo.qiao@dfrobot.com)
* @version V1.0.0
* @date 2020-03-13
*/
#include "Arduino.h"
#include "Wire.h"
#include "SoftwareSerial.h"
#include "HuskyLensProtocolCore.h"
#ifndef _HUSKYLENS_H
#define _HUSKYLENS_H
////////////////////////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////
enum protocolCommand{
COMMAND_REQUEST = 0x20,
COMMAND_REQUEST_BLOCKS,
COMMAND_REQUEST_ARROWS,
COMMAND_REQUEST_LEARNED,
COMMAND_REQUEST_BLOCKS_LEARNED,
COMMAND_REQUEST_ARROWS_LEARNED,
COMMAND_REQUEST_BY_ID,
COMMAND_REQUEST_BLOCKS_BY_ID,
COMMAND_REQUEST_ARROWS_BY_ID,
COMMAND_RETURN_INFO,
COMMAND_RETURN_BLOCK,
COMMAND_RETURN_ARROW,
COMMAND_REQUEST_KNOCK,
COMMAND_REQUEST_ALGORITHM,
COMMAND_RETURN_OK,
COMMAND_REQUEST_LEARN,
COMMAND_REQUEST_FORGET,
COMMAND_REQUEST_SENSOR,
};
typedef struct{
uint8_t command;
union
{
int16_t first;
int16_t xCenter;
int16_t xOrigin;
int16_t protocolSize;
int16_t algorithmType;
int16_t requestID;
};
union
{
int16_t second;
int16_t yCenter;
int16_t yOrigin;
int16_t knowledgeSize;
};
union
{
int16_t third;
int16_t width;
int16_t xTarget;
int16_t frameNum;
};
union
{
int16_t fourth;
int16_t height;
int16_t yTarget;
};
union
{
int16_t fifth;
int16_t ID;
};
}Protocol_t;
enum protocolAlgorithm{
ALGORITHM_FACE_RECOGNITION,
ALGORITHM_OBJECT_TRACKING,
ALGORITHM_OBJECT_RECOGNITION,
ALGORITHM_LINE_TRACKING,
ALGORITHM_COLOR_RECOGNITION,
ALGORITHM_TAG_RECOGNITION,
ALGORITHM_OBJECT_CLASSIFICATION,
};
///////////////////////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////
typedef Protocol_t HUSKYLENSResult;
class HUSKYLENS
{
private:
TwoWire *wire;
Stream *stream;
unsigned long timeOutDuration = 100;
unsigned long timeOutTimer;
int16_t currentIndex = 0;
Protocol_t protocolCache;
void protocolWrite(uint8_t* buffer, int length){
if (wire){
wire->beginTransmission(0x32);
wire->write(buffer, length);
wire->endTransmission();
}
else if(stream){
stream->write(buffer, length);
}
}
void timerBegin(){
timeOutTimer = millis();
}
bool timerAvailable(){
return (millis() - timeOutTimer > timeOutDuration);
}
bool protocolAvailable(){
if (wire)
{
if(!wire->available()){
wire->requestFrom(0x32, 16);
}
while(wire->available()){
int result = wire->read();
if (husky_lens_protocol_receive(result))
{
return true;
}
}
}
else if (stream)
{
while(stream->available()){
int result = stream->read();
if (husky_lens_protocol_receive(result))
{
return true;
}
}
}
return false;
}
Protocol_t protocolInfo;
Protocol_t* protocolPtr = NULL;
bool processReturn(){
currentIndex = 0;
if (!wait(COMMAND_RETURN_INFO)) return false;
protocolReadReturnInfo(protocolInfo);
protocolPtr = (Protocol_t*) realloc(protocolPtr, max(protocolInfo.protocolSize, 1) * sizeof(Protocol_t));
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if (!wait()) return false;
if (protocolReadReturnBlock(protocolPtr[i])) continue;
else if (protocolReadReturnArrow(protocolPtr[i])) continue;
else return false;
}
return true;
}
HUSKYLENSResult resultDefault;
bool wait(uint8_t command = 0){
timerBegin();
while (!timerAvailable())
{
if (protocolAvailable())
{
if (command)
{
if (husky_lens_protocol_read_begin(command)) return true;
}
else
{
return true;
}
}
}
return false;
}
bool readKnock(){
for (int i = 0; i < 5; i++)
{
protocolWriteRequestKnock();
if (wait(COMMAND_RETURN_OK))
{
return true;
}
}
return false;
}
public:
HUSKYLENS(/* args */)
{
wire = NULL;
stream = NULL;
resultDefault.command = -1;
resultDefault.first = -1;
resultDefault.second = -1;
resultDefault.third = -1;
resultDefault.fourth = -1;
resultDefault.fifth = -1;
}
~HUSKYLENS()
{
}
bool begin(Stream& streamInput){
stream = &streamInput;
wire = NULL;
return readKnock();
}
bool begin(TwoWire& streamInput){
stream = NULL;
wire = &streamInput;
return readKnock();
}
void setTimeOutDuration(unsigned long timeOutDurationInput){
timeOutDuration = timeOutDurationInput;
}
bool request(){
protocolWriteRequest();
return processReturn();
}
bool request(int16_t ID){
Protocol_t protocol;
protocol.requestID = ID;
protocolWriteRequestByID(protocol);
return processReturn();
}
bool requestBlocks(){
protocolWriteRequestBlocks();
return processReturn();
}
bool requestBlocks(int16_t ID){
Protocol_t protocol;
protocol.requestID = ID;
protocolWriteRequestBlocksByID(protocol);
return processReturn();
}
bool requestArrows(){
protocolWriteRequestArrows();
return processReturn();
}
bool requestArrows(int16_t ID){
Protocol_t protocol;
protocol.requestID = ID;
protocolWriteRequestArrowsByID(protocol);
return processReturn();
}
bool requestLearned(){
protocolWriteRequestLearned();
return processReturn();
}
bool requestBlocksLearned(){
protocolWriteRequestBlocksLearned();
return processReturn();
}
bool requestArrowsLearned(){
protocolWriteRequestArrowsLearned();
return processReturn();
}
int available(){
int result = count();
currentIndex = min(currentIndex, result);
return result - currentIndex;
}
HUSKYLENSResult read(){
return (get(currentIndex++));
}
bool isLearned(){
return countLearnedIDs();
}
bool isLearned(int ID){
return (ID <= countLearnedIDs());
}
int16_t frameNumber(){
return protocolInfo.frameNum;
}
int16_t countLearnedIDs(){
return protocolInfo.knowledgeSize;
}
int16_t count(){
return protocolInfo.protocolSize;
}
int16_t count(int16_t ID){
int16_t counter = 0;
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if(protocolPtr[i].ID == ID) counter++;
}
return counter;
}
int16_t countBlocks(){
int16_t counter = 0;
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if(protocolPtr[i].command == COMMAND_RETURN_BLOCK) counter++;
}
return counter;
}
int16_t countBlocks(int16_t ID){
int16_t counter = 0;
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if(protocolPtr[i].command == COMMAND_RETURN_BLOCK && protocolPtr[i].ID == ID) counter++;
}
return counter;
}
int16_t countArrows(){
int16_t counter = 0;
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if(protocolPtr[i].command == COMMAND_RETURN_ARROW) counter++;
}
return counter;
}
int16_t countArrows(int16_t ID){
int16_t counter = 0;
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if(protocolPtr[i].command == COMMAND_RETURN_ARROW && protocolPtr[i].ID == ID) counter++;
}
return counter;
}
int16_t countLearned(){
int16_t counter = 0;
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if(protocolPtr[i].ID) counter++;
}
return counter;
}
int16_t countBlocksLearned(){
int16_t counter = 0;
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if(protocolPtr[i].command == COMMAND_RETURN_BLOCK && protocolPtr[i].ID) counter++;
}
return counter;
}
int16_t countArrowsLearned(){
int16_t counter = 0;
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if(protocolPtr[i].command == COMMAND_RETURN_ARROW && protocolPtr[i].ID) counter++;
}
return counter;
}
HUSKYLENSResult get(int16_t index){
if (index < count())
{
return protocolPtr[index];
}
return resultDefault;
}
HUSKYLENSResult get(int16_t ID, int16_t index){
int16_t counter = 0;
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if(protocolPtr[i].ID == ID) if(index == counter++) return protocolPtr[i];
}
return resultDefault;
}
HUSKYLENSResult getBlock(int16_t index){
int16_t counter = 0;
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if(protocolPtr[i].command == COMMAND_RETURN_BLOCK) if(index == counter++) return protocolPtr[i];
}
return resultDefault;
}
HUSKYLENSResult getBlock(int16_t ID, int16_t index){
int16_t counter = 0;
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if(protocolPtr[i].command == COMMAND_RETURN_BLOCK && protocolPtr[i].ID == ID) if(index == counter++) return protocolPtr[i];
}
return resultDefault;
}
HUSKYLENSResult getArrow(int16_t index){
int16_t counter = 0;
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if(protocolPtr[i].command == COMMAND_RETURN_ARROW) if(index == counter++) return protocolPtr[i];
}
return resultDefault;
}
HUSKYLENSResult getArrow(int16_t ID, int16_t index){
int16_t counter = 0;
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if(protocolPtr[i].command == COMMAND_RETURN_ARROW && protocolPtr[i].ID == ID) if(index == counter++) return protocolPtr[i];
}
return resultDefault;
}
HUSKYLENSResult getLearned(int16_t index){
int16_t counter = 0;
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if(protocolPtr[i].ID) if(index == counter++) return protocolPtr[i];
}
return resultDefault;
}
HUSKYLENSResult getBlockLearned(int16_t index){
int16_t counter = 0;
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if(protocolPtr[i].command == COMMAND_RETURN_BLOCK && protocolPtr[i].ID) if(index == counter++) return protocolPtr[i];
}
return resultDefault;
}
HUSKYLENSResult getArrowLearned(int16_t index){
int16_t counter = 0;
for (int i = 0; i < protocolInfo.protocolSize; i++)
{
if(protocolPtr[i].command == COMMAND_RETURN_ARROW && protocolPtr[i].ID) if(index == counter++) return protocolPtr[i];
}
return resultDefault;
}
bool writeAlgorithm(protocolAlgorithm algorithmType){
Protocol_t protocol;
protocol.algorithmType = algorithmType;
protocolWriteRequestAlgorithm(protocol);
return wait(COMMAND_RETURN_OK);
}
bool writeLearn(int ID){
Protocol_t protocol;
protocol.requestID = ID;
protocolWriteRequestLearn(protocol);
return wait(COMMAND_RETURN_OK);
}
bool writeForget(){
protocolWriteRequestForget();
return wait(COMMAND_RETURN_OK);
}
bool writeSensor(int sensor0, int sensor1, int sensor2){
Protocol_t protocol;
protocol.first = sensor0;
protocol.second = sensor1;
protocol.third = sensor2;
protocolWriteRequestSensor(protocol);
return wait(COMMAND_RETURN_OK);
}
////////////////////////////////////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////////////////////////////////////
void protocolWriteCommand(Protocol_t& protocol, uint8_t command){
protocol.command = command;
uint8_t* buffer = husky_lens_protocol_write_begin(protocol.command);
int length = husky_lens_protocol_write_end();
protocolWrite(buffer, length);
}
bool protocolReadCommand(Protocol_t& protocol, uint8_t command){
if (husky_lens_protocol_read_begin(command))
{
protocol.command = command;
husky_lens_protocol_read_end();
return true;
}
else
{
return false;
}
}
void protocolWriteFiveInt16(Protocol_t& protocol, uint8_t command){
protocol.command = command;
uint8_t* buffer = husky_lens_protocol_write_begin(protocol.command);
husky_lens_protocol_write_int16(protocol.first);
husky_lens_protocol_write_int16(protocol.second);
husky_lens_protocol_write_int16(protocol.third);
husky_lens_protocol_write_int16(protocol.fourth);
husky_lens_protocol_write_int16(protocol.fifth);
int length = husky_lens_protocol_write_end();
protocolWrite(buffer, length);
}
bool protocolReadFiveInt16(Protocol_t& protocol, uint8_t command){
if (husky_lens_protocol_read_begin(command))
{
protocol.command = command;
protocol.first = husky_lens_protocol_read_int16();
protocol.second = husky_lens_protocol_read_int16();
protocol.third = husky_lens_protocol_read_int16();
protocol.fourth = husky_lens_protocol_read_int16();
protocol.fifth = husky_lens_protocol_read_int16();
husky_lens_protocol_read_end();
return true;
}
else
{
return false;
}
}
void protocolWriteOneInt16(Protocol_t& protocol, uint8_t command){
protocol.command = command;
uint8_t* buffer = husky_lens_protocol_write_begin(protocol.command);
husky_lens_protocol_write_int16(protocol.first);
int length = husky_lens_protocol_write_end();
protocolWrite(buffer, length);
}
bool protocolReadOneInt16(Protocol_t& protocol, uint8_t command){
if (husky_lens_protocol_read_begin(command))
{
protocol.command = command;
protocol.first = husky_lens_protocol_read_int16();
husky_lens_protocol_read_end();
return true;
}
else
{
return false;
}
}
#define PROTOCOL_CREATE(function, type, command)\
void protocolWrite##function(Protocol_t& protocol){\
protocolWrite##type(protocol, command);\
}\
void protocolWrite##function(){\
Protocol_t protocol;\
protocolWrite##type(protocol, command);\
}\
bool protocolRead##function(Protocol_t& protocol){\
return protocolRead##type(protocol, command);\
}\
bool protocolRead##function(){\
Protocol_t protocol;\
return protocolRead##type(protocol, command);\
}
PROTOCOL_CREATE(Request, Command, COMMAND_REQUEST)
PROTOCOL_CREATE(RequestBlocks, Command, COMMAND_REQUEST_BLOCKS)
PROTOCOL_CREATE(RequestArrows, Command, COMMAND_REQUEST_ARROWS)
PROTOCOL_CREATE(RequestLearned, Command, COMMAND_REQUEST_LEARNED)
PROTOCOL_CREATE(RequestBlocksLearned, Command, COMMAND_REQUEST_BLOCKS_LEARNED)
PROTOCOL_CREATE(RequestArrowsLearned, Command, COMMAND_REQUEST_ARROWS_LEARNED)
PROTOCOL_CREATE(RequestByID, OneInt16, COMMAND_REQUEST_BY_ID)
PROTOCOL_CREATE(RequestBlocksByID, OneInt16, COMMAND_REQUEST_BLOCKS_BY_ID)
PROTOCOL_CREATE(RequestArrowsByID, OneInt16, COMMAND_REQUEST_ARROWS_BY_ID)
PROTOCOL_CREATE(ReturnInfo, FiveInt16, COMMAND_RETURN_INFO)
PROTOCOL_CREATE(ReturnBlock, FiveInt16, COMMAND_RETURN_BLOCK)
PROTOCOL_CREATE(ReturnArrow, FiveInt16, COMMAND_RETURN_ARROW)
PROTOCOL_CREATE(RequestKnock, Command, COMMAND_REQUEST_KNOCK)
PROTOCOL_CREATE(RequestAlgorithm, OneInt16, COMMAND_REQUEST_ALGORITHM)
PROTOCOL_CREATE(ReturnOK, Command, COMMAND_RETURN_OK)
PROTOCOL_CREATE(RequestLearn, OneInt16, COMMAND_REQUEST_LEARN)
PROTOCOL_CREATE(RequestForget, Command, COMMAND_REQUEST_FORGET)
PROTOCOL_CREATE(RequestSensor, FiveInt16, COMMAND_REQUEST_SENSOR) ////////////////////////////////////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////////////////////////////////////
};
#endif

11 projects • 38 followers
IoT enthusiast experienced with autonomous drones and vehicles, FPGA-based vision applications, MCU programming/Embedded/ML/AI
Comments
Please log in or sign up to comment.