


Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 3 | ||||
| × | 3 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
| ||||||
| ||||||
what you need to do is just write the name of apparatus on this site and ship it at discount rate online.
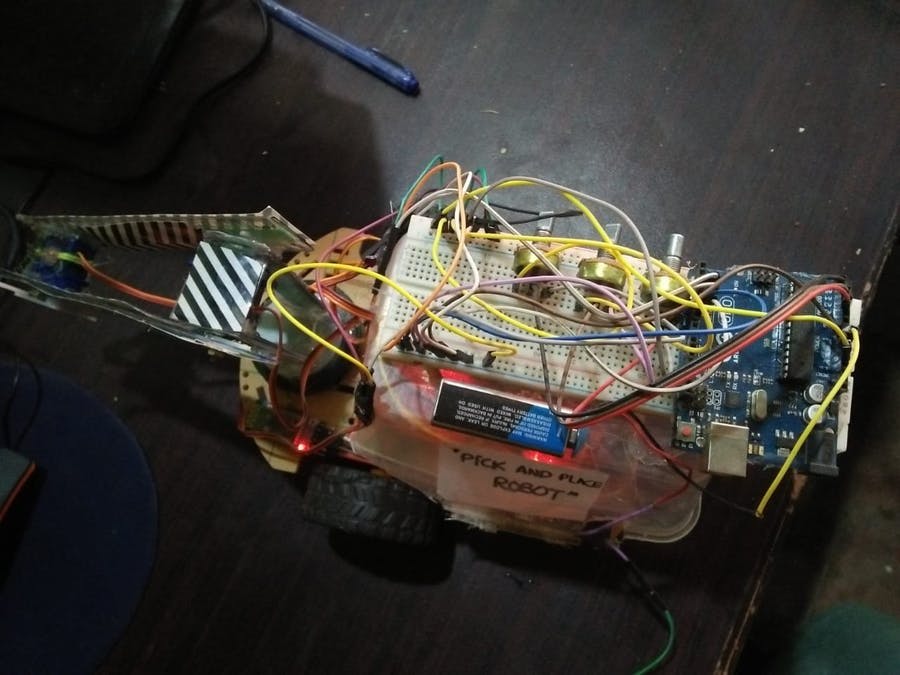
Arm instruction:
Arm instruction:I have make the arm using scales but can also purchase better arm online from
What is a robotic arm used for?
The robot uses motion sensors to make sure it moves just the right amount. An industrial robot with six joints closely resembles a human arm -- it has the equivalent of a shoulder, an elbow and a wrist.
What are the parts of a robotic arm?
The arm is the main section of the robotic arm and consists of three parts: the shoulder, elbow and wrist. These are all joints, with the shoulder resting at the base of the arm, typically connected to the controller, and it can move forward, backward or spin.
Servo Motors.
I have used mini servo motors which can only pick 9 gram of weight at a time you can purchase bigger motors through upper link.
Servo motors have been around for a long time and are utilized in many applications. They are small in size but pack a big punch and are very energy-efficient. These features allow them to be used to operate remote-controlled or radio-controlled toys car robotis and airplanes. Servo motors are also used in industrial applications, robotics, in-line manufacturing, pharmaceutics and food services. But how do the little guys work?
The servo circuitry is built right inside the motor unit and has a positionable shaft, which usually is fitted with a gear(as shown below). The motor is controlled with an electric signal which determines the amount of movement of the shaft
Note: if you have purchased the arm then no need to buy servo motors.
Car instruction : you need to buy chassis for structure you can purchase through upper links.
use circuit digest app
Code: we have two separate code for car and arm that is the reason we are using two codes. if you are good at language you can merge these both codes.








Comments
Please log in or sign up to comment.