/**************************************************************************
*
* Author : [PIE.SPACE]
* Start Date : [10-1-2025]
* End Date : [22-1-2025]
*
* MPU6050 Check
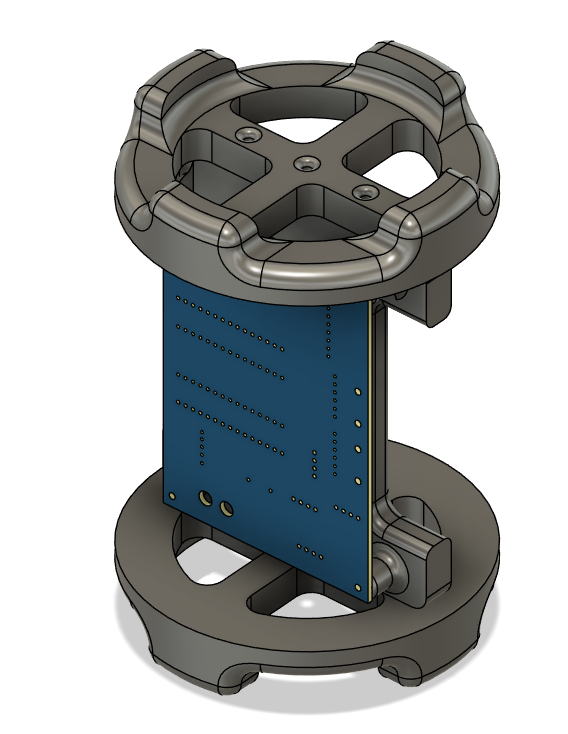
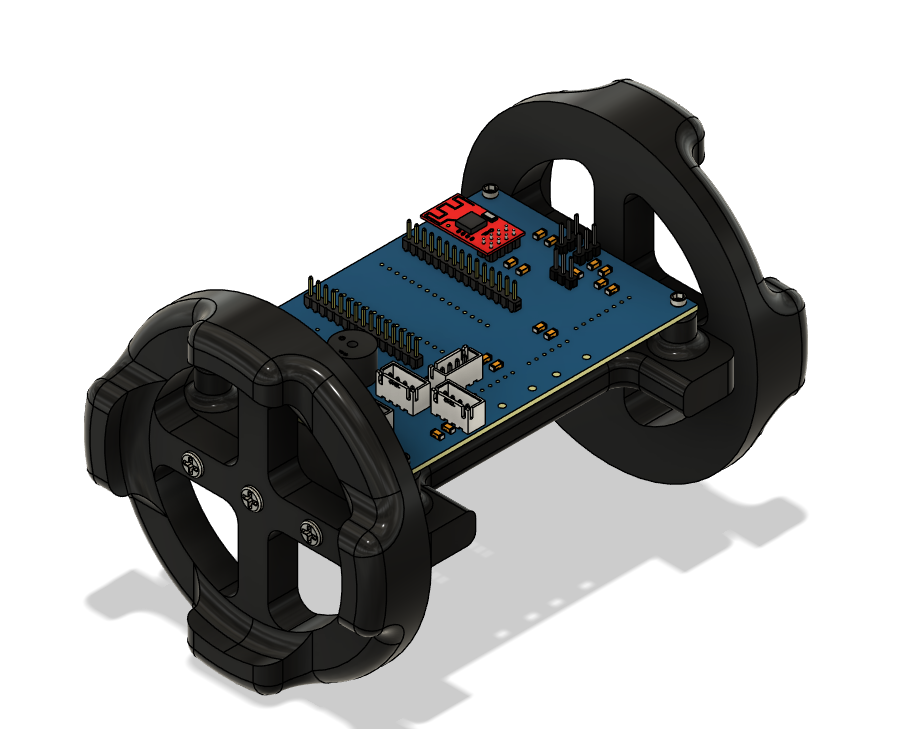
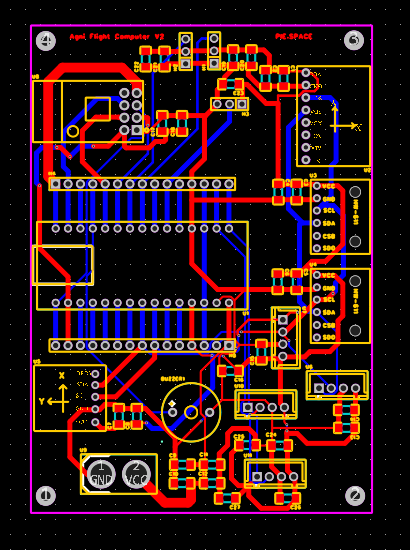
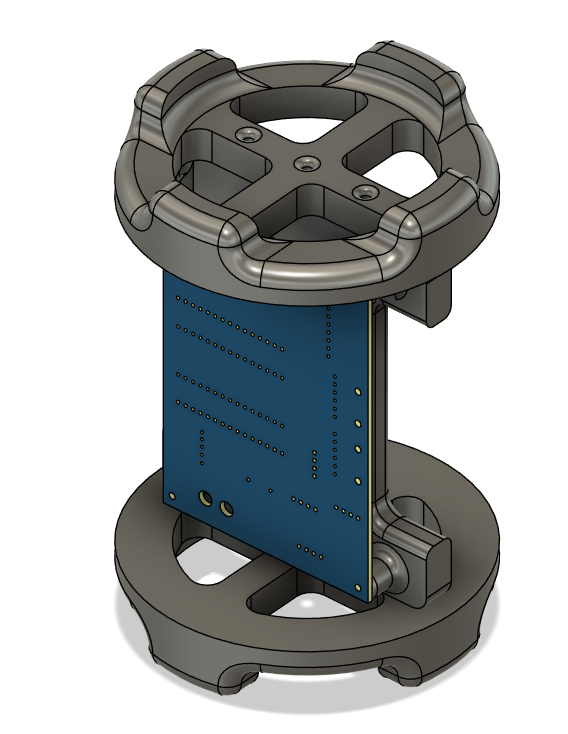
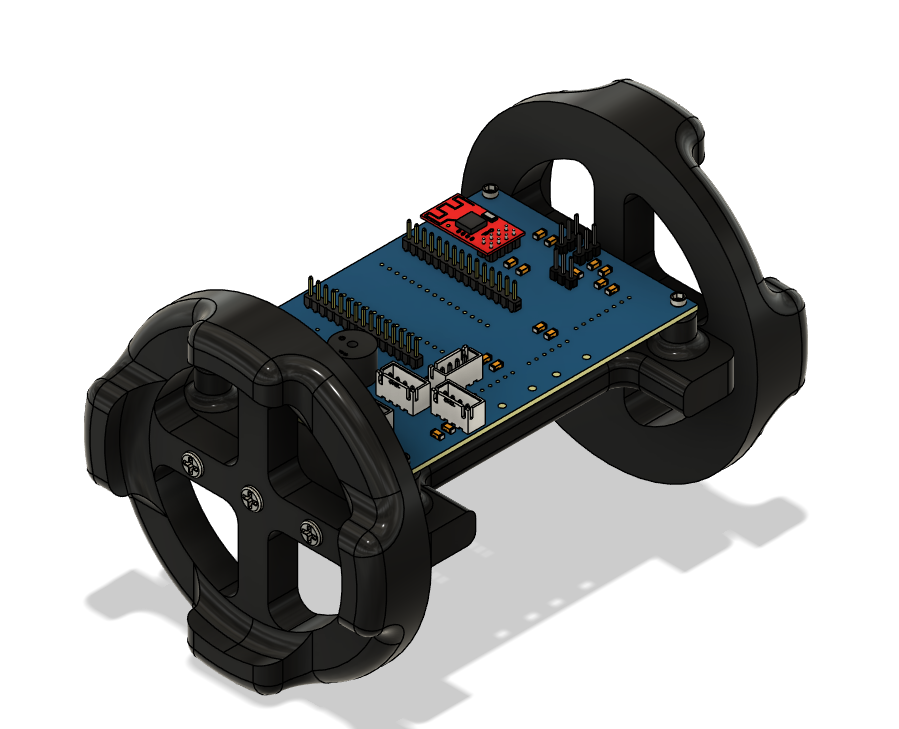
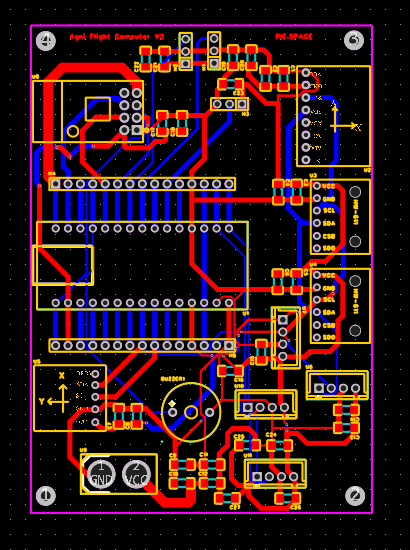
Hi, this is Agni Flight Computer Version 2. This flight computer is designed only for Ground Control Station (GCS) purposes and is not used in the rocket because it runs on an Arduino Nano, which has limited processing power. However, if you want to use this flight computer for your rocket project, feel free to use it 🚀
**************************************************************************/
#include <Adafruit_MPU6050.h>
#include <Adafruit_Sensor.h>
#include <Wire.h>
#include <EEPROM.h>
#include <math.h>
#include <Arduino.h>
#include <Adafruit_NeoPixel.h> // For WS2812B LED stripe
/**************************************************************************
Function Prototypes
**************************************************************************/
void calibrateAccelerometer();
void calibrateGyroscope();
void sensorSelfTest();
void saveCalibrationData();
void loadCalibrationData();
void resetDisplacement();
void MadgwickAHRSupdateIMU(float gx, float gy, float gz, float ax, float ay, float az, float dt);
/**************************************************************************
EEPROM Calibration Storage Definitions
**************************************************************************/
#define EEPROM_CALIB_SIGNATURE 0xA55A55A5UL
#define EEPROM_SIGNATURE_ADDR 0
#define EEPROM_CALIB_ADDR 4
struct CalibrationData {
float accXOffset;
float accYOffset;
float accZOffset;
float gyroXOffset;
float gyroYOffset;
float gyroZOffset;
};
CalibrationData calibData;
bool calibrationLoaded = false;
/**************************************************************************
Global Objects and Variables
**************************************************************************/
Adafruit_MPU6050 mpu;
// Timing for sensor updates
unsigned long previousTime = 0;
// Displacement calculation (via double integration)
float velocityX = 0.0f, velocityY = 0.0f, velocityZ = 0.0f;
float displacementX = 0.0f, displacementY = 0.0f, displacementZ = 0.0f;
// Shock detection
#define SHOCK_THRESHOLD 15.0f // m/s^2 threshold
bool shockDetected = false;
// Vibration sensing (rolling standard deviation)
#define VIBRATION_WINDOW_SIZE 50
float vibrationBuffer[VIBRATION_WINDOW_SIZE];
int vibrationIndex = 0;
bool bufferFilled = false;
float vibrationLevel = 0.0f;
// Min/Max tracking for angular velocity and linear acceleration
float minAngularVelocity = 3.4e38f;
float maxAngularVelocity = -3.4e38f;
float minLinearAcceleration = 3.4e38f;
float maxLinearAcceleration = -3.4e38f;
// Noise threshold for acceleration (to mitigate drift in integration)
#define ACC_NOISE_THRESHOLD 0.1f
// Madgwick variables
volatile float q0 = 1.0f, q1 = 0.0f, q2 = 0.0f, q3 = 0.0f;
const float beta = 0.1f; // Madgwick algorithm gain
/**************************************************************************
WS2812B LED Stripe Definitions and Variables
**************************************************************************/
#define LED_PIN 3 // Pin connected to the WS2812B stripe
#define NUM_LEDS 1 // Number of LEDs in the stripe
Adafruit_NeoPixel strip(NUM_LEDS, LED_PIN, NEO_GRB + NEO_KHZ800);
// For continuous rainbow glow (non-blocking)
unsigned long previousRainbowMillis = 0;
uint8_t rainbowPos = 0;
const uint16_t RAINBOW_INTERVAL = 20; // Update interval in milliseconds
/**************************************************************************
Musical Note Definitions
**************************************************************************/
#define Buzzer_Pin 9
#define NOTE_B0 31
#define NOTE_C1 33
#define NOTE_CS1 35
#define NOTE_D1 37
#define NOTE_DS1 39
#define NOTE_E1 41
#define NOTE_F1 44
#define NOTE_FS1 46
#define NOTE_G1 49
#define NOTE_GS1 52
#define NOTE_A1 55
#define NOTE_AS1 58
#define NOTE_B1 62
#define NOTE_C2 65
#define NOTE_CS2 69
#define NOTE_D2 73
#define NOTE_DS2 78
#define NOTE_E2 82
#define NOTE_F2 87
#define NOTE_FS2 93
#define NOTE_G2 98
#define NOTE_GS2 104
#define NOTE_A2 110
#define NOTE_AS2 117
#define NOTE_B2 123
#define NOTE_C3 131
#define NOTE_CS3 139
#define NOTE_D3 147
#define NOTE_DS3 156
#define NOTE_E3 165
#define NOTE_F3 175
#define NOTE_FS3 185
#define NOTE_G3 196
#define NOTE_GS3 208
#define NOTE_A3 220
#define NOTE_AS3 233
#define NOTE_B3 247
#define NOTE_C4 262
#define NOTE_CS4 277
#define NOTE_D4 294
#define NOTE_DS4 311
#define NOTE_E4 330
#define NOTE_F4 349
#define NOTE_FS4 370
#define NOTE_G4 392
#define NOTE_GS4 415
#define NOTE_A4 440
#define NOTE_AS4 466
#define NOTE_B4 494
#define NOTE_C5 523
#define NOTE_CS5 554
#define NOTE_D5 587
#define NOTE_DS5 622
#define NOTE_E5 659
#define NOTE_F5 698
#define NOTE_FS5 740
#define NOTE_G5 784
#define NOTE_GS5 831
#define NOTE_A5 880
#define NOTE_AS5 932
#define NOTE_B5 988
#define NOTE_C6 1047
#define NOTE_CS6 1109
#define NOTE_D6 1175
#define NOTE_DS6 1245
#define NOTE_E6 1319
#define NOTE_F6 1397
#define NOTE_FS6 1480
#define NOTE_G6 1568
#define NOTE_GS6 1661
#define NOTE_A6 1760
#define NOTE_AS6 1865
#define NOTE_B6 1976
#define NOTE_C7 2093
#define NOTE_CS7 2217
#define NOTE_D7 2349
#define NOTE_DS7 2489
#define NOTE_E7 2637
#define NOTE_F7 2794
#define NOTE_FS7 2960
#define NOTE_G7 3136
#define NOTE_GS7 3322
#define NOTE_A7 3520
#define NOTE_AS7 3729
#define NOTE_B7 3951
#define NOTE_C8 4186
#define NOTE_CS8 4435
#define NOTE_D8 4699
#define NOTE_DS8 4978
/**************************************************************************
WS2812B LED Helper Functions
**************************************************************************/
// The Wheel function maps a number between 0 and 255 to a color value.
uint32_t Wheel(byte WheelPos) {
WheelPos = 255 - WheelPos;
if(WheelPos < 85) {
return strip.Color(255 - WheelPos * 3, 0, WheelPos * 3);
} else if(WheelPos < 170) {
WheelPos -= 85;
return strip.Color(0, WheelPos * 3, 255 - WheelPos * 3);
} else {
WheelPos -= 170;
return strip.Color(WheelPos * 3, 255 - WheelPos * 3, 0);
}
}
// Startup LED flash with rainbow for 5 seconds.
void StartUpFlashLed() {
Serial.println("Showing rainbow for 5 seconds...");
unsigned long startTime = millis();
int iteration = 0;
while (millis() - startTime < 5000) {
// Use an unsigned type for the LED index to match numPixels() return type.
for(uint16_t i = 0; i < strip.numPixels(); i++) {
int colorIndex = (i + iteration) & 255;
strip.setPixelColor(i, Wheel(colorIndex));
}
strip.show();
iteration++;
delay(10);
}
strip.clear();
strip.show();
}
/**************************************************************************
Buzzer Melody Patterns
**************************************************************************/
static int droneStartupMelody[][2] = {
{NOTE_G4, 200},
{NOTE_A4, 200},
{NOTE_B4, 250},
{NOTE_G4, 200},
{NOTE_A4, 200},
{NOTE_B4, 300},
{0, 150},
{NOTE_D5, 200},
{NOTE_FS5, 200},
{NOTE_A5, 250},
{NOTE_D5, 200},
{NOTE_FS5, 200},
{NOTE_A5, 300},
};
int startupLength = sizeof(droneStartupMelody) / sizeof(droneStartupMelody[0]);
#define ASC_SWEEP_START_FREQ 300
#define ASC_SWEEP_END_FREQ 1500
#define ASC_SWEEP_STEP 50
#define ASC_SWEEP_DELAY 30
#define DESC_SWEEP_START_FREQ 1500
#define DESC_SWEEP_END_FREQ 300
#define DESC_SWEEP_STEP 50
#define DESC_SWEEP_DELAY 30
#define URGENT_BEEP_REPEATS 4
#define URGENT_BEEP_ON_MS 150
#define URGENT_BEEP_OFF_MS 150
static int victoryMelody[][2] = {
{NOTE_C4, 200}, {NOTE_E4, 200}, {NOTE_G4, 200},
{NOTE_C5, 250},
{0, 100},
{NOTE_G4, 200}, {NOTE_E4, 200}, {NOTE_C4, 300}
};
int victoryLength = sizeof(victoryMelody) / sizeof(victoryMelody[0]);
static int errorMelody[][2] = {
{NOTE_G3, 200}, {NOTE_E3, 200}, {NOTE_C3, 300},
{0, 100},
{NOTE_C3, 150}, {NOTE_C3, 150}
};
int errorLength = sizeof(errorMelody) / sizeof(errorMelody[0]);
static int futuristicArp[][2] = {
{NOTE_C4, 100},
{NOTE_E4, 100},
{NOTE_G4, 100},
{NOTE_C5, 100},
{NOTE_G4, 100},
{NOTE_E4, 100},
{NOTE_C4, 100},
{0, 100}
};
int futuristicArpLength = sizeof(futuristicArp) / sizeof(futuristicArp[0]);
// Helper function to play a melody array.
void playMelody(const int melody[][2], int length) {
for (int i = 0; i < length; i++) {
int freq = melody[i][0];
int dur = melody[i][1];
if (freq > 0) {
tone(Buzzer_Pin, freq, dur);
} else {
noTone(Buzzer_Pin);
}
delay(dur + 20);
noTone(Buzzer_Pin);
}
}
void playStartupMelody() {
Serial.println("Playing Drone Startup Melody...");
playMelody(droneStartupMelody, startupLength);
}
void ascendingSweep() {
Serial.println("Ascending Sweep...");
for (int freq = ASC_SWEEP_START_FREQ; freq <= ASC_SWEEP_END_FREQ; freq += ASC_SWEEP_STEP) {
tone(Buzzer_Pin, freq);
delay(ASC_SWEEP_DELAY);
}
noTone(Buzzer_Pin);
}
void descendingSweep() {
Serial.println("Descending Sweep...");
for (int freq = DESC_SWEEP_START_FREQ; freq >= DESC_SWEEP_END_FREQ; freq -= DESC_SWEEP_STEP) {
tone(Buzzer_Pin, freq);
delay(DESC_SWEEP_DELAY);
}
noTone(Buzzer_Pin);
}
void urgentBeep() {
Serial.println("Urgent Beep Pattern...");
for (int i = 0; i < URGENT_BEEP_REPEATS; i++) {
digitalWrite(Buzzer_Pin, HIGH);
delay(URGENT_BEEP_ON_MS);
digitalWrite(Buzzer_Pin, LOW);
delay(URGENT_BEEP_OFF_MS);
}
noTone(Buzzer_Pin);
}
void playVictoryMelody() {
Serial.println("Playing Victory Melody...");
playMelody(victoryMelody, victoryLength);
}
void playErrorMelody() {
Serial.println("Playing Error Melody...");
playMelody(errorMelody, errorLength);
}
void playFuturisticArpeggio() {
Serial.println("Playing Futuristic Arpeggio...");
for (int i = 0; i < 3; i++) {
playMelody(futuristicArp, futuristicArpLength);
}
}
void randomFuturisticBeep(int beepCount) {
Serial.println("Playing Random Futuristic Beeps...");
for (int i = 0; i < beepCount; i++) {
int randFreq = random(200, 2000);
int randDur = random(50, 300);
tone(Buzzer_Pin, randFreq, randDur);
delay(randDur + 30);
noTone(Buzzer_Pin);
}
}
// Renamed original buzzer setup & loop (not used):
void unusedBuzzerSetup() {
// Original buzzer code remains here but is not called.
}
void unusedBuzzerLoop() {
// Empty in the original example.
}
/**************************************************************************
Arduino Setup (Primary)
**************************************************************************/
void setup() {
// 1) Set up buzzer pin
pinMode(Buzzer_Pin, OUTPUT);
// 2) Initialize LED stripe for WS2812B
strip.begin();
strip.show(); // Ensure all LEDs are off initially
// 3) Start serial communication at 230400 baud
Serial.begin(230400);
while (!Serial) { delay(1); }
Serial.println("Starting. Buzzer Tone first...");
// 4) Play buzzer melodies and sweeps
playStartupMelody(); // Drone-style startup
ascendingSweep(); // Ascending sweep
descendingSweep(); // Descending sweep
urgentBeep(); // Urgent beep pattern
// 5) Flash the LED stripe with a rainbow pattern for 5 seconds
StartUpFlashLed();
urgentBeep();
Serial.println("Buzzer sequences done. Now initializing MPU6050...");
// 6) Initialize the MPU6050
if (!mpu.begin()) {
Serial.println(F("Failed to find MPU6050 chip. Stopping."));
while (1) { delay(10); }
}
Serial.println(F("MPU6050 Found."));
// Set accelerometer range
mpu.setAccelerometerRange(MPU6050_RANGE_16_G);
Serial.print(F("Accelerometer range set to: "));
switch (mpu.getAccelerometerRange()) {
case MPU6050_RANGE_2_G: Serial.println(F("±2G")); break;
case MPU6050_RANGE_4_G: Serial.println(F("±4G")); break;
case MPU6050_RANGE_8_G: Serial.println(F("±8G")); break;
case MPU6050_RANGE_16_G: Serial.println(F("±16G")); break;
}
// Set gyroscope range
mpu.setGyroRange(MPU6050_RANGE_2000_DEG);
Serial.print(F("Gyro range set to: "));
switch (mpu.getGyroRange()) {
case MPU6050_RANGE_250_DEG: Serial.println(F("±250 deg/s")); break;
case MPU6050_RANGE_500_DEG: Serial.println(F("±500 deg/s")); break;
case MPU6050_RANGE_1000_DEG: Serial.println(F("±1000 deg/s")); break;
case MPU6050_RANGE_2000_DEG: Serial.println(F("±2000 deg/s")); break;
}
// Set digital low-pass filter
mpu.setFilterBandwidth(MPU6050_BAND_260_HZ);
Serial.print(F("Filter bandwidth set to: "));
switch (mpu.getFilterBandwidth()) {
case MPU6050_BAND_260_HZ: Serial.println(F("260 Hz")); break;
case MPU6050_BAND_184_HZ: Serial.println(F("184 Hz")); break;
case MPU6050_BAND_94_HZ: Serial.println(F("94 Hz")); break;
case MPU6050_BAND_44_HZ: Serial.println(F("44 Hz")); break;
case MPU6050_BAND_21_HZ: Serial.println(F("21 Hz")); break;
case MPU6050_BAND_10_HZ: Serial.println(F("10 Hz")); break;
case MPU6050_BAND_5_HZ: Serial.println(F("5 Hz")); break;
}
// Sensor self-test
sensorSelfTest();
// Load calibration data; if unavailable, perform calibration
loadCalibrationData();
if (!calibrationLoaded) {
calibrateAccelerometer();
calibrateGyroscope();
}
previousTime = millis();
Serial.println("Setup complete.\n");
}
/**************************************************************************
Arduino Loop (Primary)
**************************************************************************/
void loop() {
// 1) Get MPU sensor events
sensors_event_t accelEvent, gyroEvent, tempEvent;
mpu.getEvent(&accelEvent, &gyroEvent, &tempEvent);
// 2) Apply calibration offsets
float ax = accelEvent.acceleration.x - calibData.accXOffset;
float ay = accelEvent.acceleration.y - calibData.accYOffset;
float az = accelEvent.acceleration.z - calibData.accZOffset;
float gx = gyroEvent.gyro.x - calibData.gyroXOffset;
float gy = gyroEvent.gyro.y - calibData.gyroYOffset;
float gz = gyroEvent.gyro.z - calibData.gyroZOffset;
// 3) Calculate time difference
unsigned long currentTime = millis();
float dt = (currentTime - previousTime) / 1000.0f;
previousTime = currentTime;
// 4) Madgwick sensor fusion update
MadgwickAHRSupdateIMU(gx, gy, gz, ax, ay, az, dt);
// 5) Convert quaternion to Euler angles (in degrees)
float rollRad = atan2(2.0f*(q0*q1 + q2*q3), 1 - 2*(q1*q1 + q2*q2));
float pitchRad = asin(2.0f*(q0*q2 - q3*q1));
float yawRad = atan2(2.0f*(q0*q3 + q1*q2), 1 - 2*(q2*q2 + q3*q3));
float roll = rollRad * (180.0f / PI);
float pitch = pitchRad * (180.0f / PI);
float yaw = yawRad * (180.0f / PI);
// 6) Gravity removal for displacement
float gravityX = sin(pitchRad) * 9.81f;
float gravityY = -sin(rollRad) * 9.81f;
float gravityZ = cos(pitchRad)*cos(rollRad) * 9.81f;
float linAccX = ax - gravityX;
float linAccY = ay - gravityY;
float linAccZ = az - gravityZ;
// 7) Apply noise threshold
if (fabs(linAccX) < ACC_NOISE_THRESHOLD) linAccX = 0;
if (fabs(linAccY) < ACC_NOISE_THRESHOLD) linAccY = 0;
if (fabs(linAccZ) < ACC_NOISE_THRESHOLD) linAccZ = 0;
// 8) Double integration for displacement
velocityX += linAccX * dt;
velocityY += linAccY * dt;
velocityZ += linAccZ * dt;
displacementX += velocityX * dt;
displacementY += velocityY * dt;
displacementZ += velocityZ * dt;
// 9) Convert gyro readings to degrees per second
float gxDeg = gx * (180.0f / PI);
float gyDeg = gy * (180.0f / PI);
float gzDeg = gz * (180.0f / PI);
// 10) Track min/max angular velocity and linear acceleration
float angularVelMag = sqrt(gxDeg*gxDeg + gyDeg*gyDeg + gzDeg*gzDeg);
if (angularVelMag < minAngularVelocity) minAngularVelocity = angularVelMag;
if (angularVelMag > maxAngularVelocity) maxAngularVelocity = angularVelMag;
float linearAccMag = sqrt(ax*ax + ay*ay + az*az);
if (linearAccMag < minLinearAcceleration) minLinearAcceleration = linearAccMag;
if (linearAccMag > maxLinearAcceleration) maxLinearAcceleration = linearAccMag;
// 11) Shock detection
shockDetected = (linearAccMag > SHOCK_THRESHOLD);
// 12) Vibration (rolling standard deviation)
vibrationBuffer[vibrationIndex] = linearAccMag;
vibrationIndex = (vibrationIndex + 1) % VIBRATION_WINDOW_SIZE;
if (vibrationIndex == 0) {
bufferFilled = true;
}
if (bufferFilled) {
float mean = 0.0f;
for (int i = 0; i < VIBRATION_WINDOW_SIZE; i++) {
mean += vibrationBuffer[i];
}
mean /= (float)VIBRATION_WINDOW_SIZE;
float sumSq = 0.0f;
for (int i = 0; i < VIBRATION_WINDOW_SIZE; i++) {
float diff = (vibrationBuffer[i] - mean);
sumSq += diff * diff;
}
vibrationLevel = sqrt(sumSq / (float)VIBRATION_WINDOW_SIZE);
}
// 13) Print data in CSV format to Serial Monitor
Serial.print(roll, 2); Serial.print(",");
Serial.print(pitch, 2); Serial.print(",");
Serial.print(yaw, 2); Serial.print(",");
Serial.print(q0, 4); Serial.print(",");
Serial.print(q1, 4); Serial.print(",");
Serial.print(q2, 4); Serial.print(",");
Serial.print(q3, 4); Serial.print(",");
Serial.print(ax, 2); Serial.print(",");
Serial.print(ay, 2); Serial.print(",");
Serial.print(az, 2); Serial.print(",");
Serial.print(gxDeg, 2); Serial.print(",");
Serial.print(gyDeg, 2); Serial.print(",");
Serial.print(gzDeg, 2); Serial.print(",");
Serial.print(tempEvent.temperature, 1); Serial.print(",");
Serial.print(minAngularVelocity, 2); Serial.print(",");
Serial.print(maxAngularVelocity, 2); Serial.print(",");
Serial.print(minLinearAcceleration, 2); Serial.print(",");
Serial.print(maxLinearAcceleration, 2); Serial.print(",");
Serial.print(displacementX, 2); Serial.print(",");
Serial.print(displacementY, 2); Serial.print(",");
Serial.print(displacementZ, 2); Serial.print(",");
Serial.print(shockDetected ? 1 : 0); Serial.print(",");
Serial.println(vibrationLevel, 2);
// 14) Serial command processing (if any command is sent)
if (Serial.available()) {
String command = Serial.readStringUntil('\n');
command.trim();
if (command.equalsIgnoreCase("calibrate accelerometer")) {
calibrateAccelerometer();
} else if (command.equalsIgnoreCase("calibrate gyroscope")) {
calibrateGyroscope();
} else if (command.equalsIgnoreCase("save calibration")) {
saveCalibrationData();
} else if (command.equalsIgnoreCase("load calibration")) {
loadCalibrationData();
} else if (command.equalsIgnoreCase("reset displacement")) {
resetDisplacement();
} else if (command.equalsIgnoreCase("self test")) {
sensorSelfTest();
}
}
// 15) Optionally, a small beep in each loop iteration (currently commented out)
// tone(Buzzer_Pin, 1000, 100);
// 16) Continuous non-blocking rainbow glow update for WS2812B LED stripe
if (millis() - previousRainbowMillis >= RAINBOW_INTERVAL) {
previousRainbowMillis = millis();
rainbowPos++; // Increment color position for smooth transition
// Since only one LED is used, update pixel 0 with a rainbow color
strip.setPixelColor(0, Wheel(rainbowPos));
strip.show();
}
}
/**************************************************************************
Accelerometer Calibration
**************************************************************************/
void calibrateAccelerometer() {
Serial.println(F("\n-- Accelerometer Calibration --"));
Serial.println(F("Keep the sensor flat and still..."));
const int numSamples = 100;
float sumX = 0.0f, sumY = 0.0f, sumZ = 0.0f;
for (int i = 0; i < numSamples; i++) {
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
sumX += a.acceleration.x;
sumY += a.acceleration.y;
sumZ += a.acceleration.z;
delay(10);
}
float avgX = sumX / numSamples;
float avgY = sumY / numSamples;
float avgZ = sumZ / numSamples;
calibData.accXOffset = avgX;
calibData.accYOffset = avgY;
// Subtract 9.81 so the offset yields ~9.81 when stationary
calibData.accZOffset = avgZ - 9.81f;
Serial.print(F("Accelerometer Offsets: X="));
Serial.print(calibData.accXOffset, 3);
Serial.print(F(", Y="));
Serial.print(calibData.accYOffset, 3);
Serial.print(F(", Z="));
Serial.print(calibData.accZOffset, 3);
Serial.println(F(" (Z includes gravity)"));
Serial.println(F("Accelerometer calibration complete.\n"));
}
/**************************************************************************
Gyroscope Calibration
**************************************************************************/
void calibrateGyroscope() {
Serial.println(F("\n-- Gyroscope Calibration --"));
Serial.println(F("Keep the sensor still (no rotation)..."));
const int numSamples = 100;
float sumX = 0.0f, sumY = 0.0f, sumZ = 0.0f;
for (int i = 0; i < numSamples; i++) {
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
sumX += g.gyro.x;
sumY += g.gyro.y;
sumZ += g.gyro.z;
delay(10);
}
calibData.gyroXOffset = sumX / numSamples;
calibData.gyroYOffset = sumY / numSamples;
calibData.gyroZOffset = sumZ / numSamples;
Serial.print(F("Gyroscope Offsets: X="));
Serial.print(calibData.gyroXOffset, 5);
Serial.print(F(", Y="));
Serial.print(calibData.gyroYOffset, 5);
Serial.print(F(", Z="));
Serial.print(calibData.gyroZOffset, 5);
Serial.println(F("\nGyroscope calibration complete.\n"));
}
/**************************************************************************
Sensor Self-Test Routine
**************************************************************************/
void sensorSelfTest() {
Serial.println(F("\n-- Sensor Self-Test --"));
const int numSamples = 50;
float sumAccX = 0.0f, sumAccY = 0.0f, sumAccZ = 0.0f;
float sumGyroX = 0.0f, sumGyroY = 0.0f, sumGyroZ = 0.0f;
for (int i = 0; i < numSamples; i++) {
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
sumAccX += a.acceleration.x;
sumAccY += a.acceleration.y;
sumAccZ += a.acceleration.z;
sumGyroX += g.gyro.x;
sumGyroY += g.gyro.y;
sumGyroZ += g.gyro.z;
delay(5);
}
float avgAccX = sumAccX / numSamples;
float avgAccY = sumAccY / numSamples;
float avgAccZ = sumAccZ / numSamples;
float avgGyroX = sumGyroX / numSamples;
float avgGyroY = sumGyroY / numSamples;
float avgGyroZ = sumGyroZ / numSamples;
Serial.print(F("Average Acceleration: X="));
Serial.print(avgAccX, 3);
Serial.print(F(", Y="));
Serial.print(avgAccY, 3);
Serial.print(F(", Z="));
Serial.print(avgAccZ, 3);
Serial.println();
Serial.print(F("Average Gyro: X="));
Serial.print(avgGyroX, 5);
Serial.print(F(", Y="));
Serial.print(avgGyroY, 5);
Serial.print(F(", Z="));
Serial.print(avgGyroZ, 5);
Serial.println();
if (fabs(avgAccX) > 1.0 || fabs(avgAccY) > 1.0 || fabs(avgAccZ - 9.81) > 1.0) {
Serial.println(F("Warning: Accelerometer readings out of expected range."));
} else {
Serial.println(F("Accelerometer readings are within expected range."));
}
if (fabs(avgGyroX) > 0.1 || fabs(avgGyroY) > 0.1 || fabs(avgGyroZ) > 0.1) {
Serial.println(F("Warning: Gyroscope readings out of expected range."));
} else {
Serial.println(F("Gyroscope readings are within expected range."));
}
Serial.println(F("Self-test complete.\n"));
}
/**************************************************************************
Save Calibration Data to EEPROM
**************************************************************************/
void saveCalibrationData() {
Serial.println(F("\nSaving calibration data to EEPROM..."));
uint32_t signature = EEPROM_CALIB_SIGNATURE;
EEPROM.put(EEPROM_SIGNATURE_ADDR, signature);
EEPROM.put(EEPROM_CALIB_ADDR, calibData);
Serial.println(F("Calibration data saved.\n"));
}
/**************************************************************************
Load Calibration Data from EEPROM
**************************************************************************/
void loadCalibrationData() {
uint32_t signature;
EEPROM.get(EEPROM_SIGNATURE_ADDR, signature);
if (signature == EEPROM_CALIB_SIGNATURE) {
EEPROM.get(EEPROM_CALIB_ADDR, calibData);
calibrationLoaded = true;
Serial.println(F("\nCalibration data loaded from EEPROM."));
Serial.print(F("ACC Offsets: X="));
Serial.print(calibData.accXOffset, 3);
Serial.print(F(", Y="));
Serial.print(calibData.accYOffset, 3);
Serial.print(F(", Z="));
Serial.println(calibData.accZOffset, 3);
Serial.print(F("GYRO Offsets: X="));
Serial.print(calibData.gyroXOffset, 5);
Serial.print(F(", Y="));
Serial.print(calibData.gyroYOffset, 5);
Serial.print(F(", Z="));
Serial.println(calibData.gyroZOffset, 5);
} else {
calibrationLoaded = false;
Serial.println(F("\nNo valid calibration data found in EEPROM."));
}
}
/**************************************************************************
Reset Displacement and Velocity
**************************************************************************/
void resetDisplacement() {
velocityX = velocityY = velocityZ = 0.0f;
displacementX = displacementY = displacementZ = 0.0f;
Serial.println(F("\nDisplacement and velocity reset.\n"));
}
/**************************************************************************
MadgwickAHRSupdateIMU
**************************************************************************/
void MadgwickAHRSupdateIMU(float gx, float gy, float gz, float ax, float ay, float az, float dt) {
float recipNorm;
float s0, s1, s2, s3;
float qDot1, qDot2, qDot3, qDot4;
float _2q0, _2q1, _2q2, _2q3;
float _4q0, _4q1, _4q2;
float q0q0, q1q1, q2q2, q3q3;
// Rate of change of quaternion from gyro
qDot1 = 0.5f * (-q1 * gx - q2 * gy - q3 * gz);
qDot2 = 0.5f * (q0 * gx + q2 * gz - q3 * gy);
qDot3 = 0.5f * (q0 * gy - q1 * gz + q3 * gx);
qDot4 = 0.5f * (q0 * gz + q1 * gy - q2 * gx);
// Normalize accelerometer measurement
recipNorm = sqrt(ax * ax + ay * ay + az * az);
if (recipNorm == 0.0f) return; // avoid division by zero
recipNorm = 1.0f / recipNorm;
ax *= recipNorm;
ay *= recipNorm;
az *= recipNorm;
// Auxiliary variables
_2q0 = 2.0f * q0;
_2q1 = 2.0f * q1;
_2q2 = 2.0f * q2;
_2q3 = 2.0f * q3;
_4q0 = 4.0f * q0;
_4q1 = 4.0f * q1;
_4q2 = 4.0f * q2;
q0q0 = q0 * q0;
q1q1 = q1 * q1;
q2q2 = q2 * q2;
q3q3 = q3 * q3;
// Gradient descent algorithm corrective step
float f1 = _2q1 * q3 - _2q0 * q2 - ax;
float f2 = _2q0 * q1 + _2q2 * q3 - ay;
float f3 = 1.0f - _2q1 * q1 - _2q2 * q2 - az;
s0 = -_2q2 * f1 + _2q1 * f2;
s1 = _2q3 * f1 + _2q0 * f2 - 4.0f * q1 * f3;
s2 = -_2q0 * f1 + _2q3 * f2 - 4.0f * q2 * f3;
s3 = _2q1 * f1 + _2q2 * f2;
recipNorm = sqrt(s0*s0 + s1*s1 + s2*s2 + s3*s3);
if (recipNorm == 0.0f) return;
recipNorm = 1.0f / recipNorm;
s0 *= recipNorm;
s1 *= recipNorm;
s2 *= recipNorm;
s3 *= recipNorm;
// Apply feedback step
qDot1 -= beta * s0;
qDot2 -= beta * s1;
qDot3 -= beta * s2;
qDot4 -= beta * s3;
// Integrate rate of change of quaternion to yield new quaternion
q0 += qDot1 * dt;
q1 += qDot2 * dt;
q2 += qDot3 * dt;
q3 += qDot4 * dt;
// Normalize quaternion
recipNorm = sqrt(q0*q0 + q1*q1 + q2*q2 + q3*q3);
if (recipNorm == 0.0f) return;
recipNorm = 1.0f / recipNorm;
q0 *= recipNorm;
q1 *= recipNorm;
q2 *= recipNorm;
q3 *= recipNorm;
}





















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
Comments