


Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
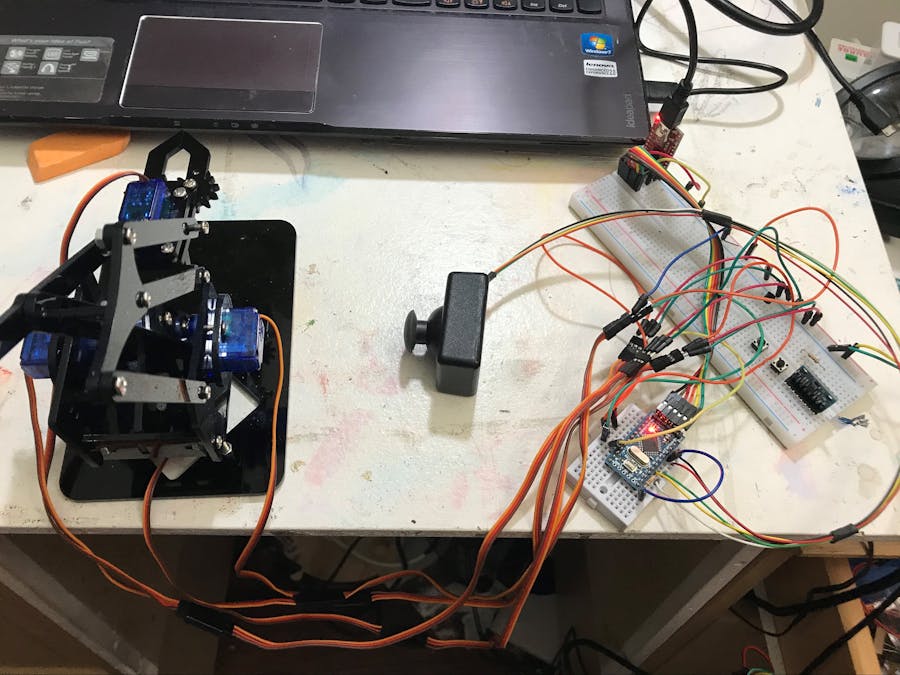
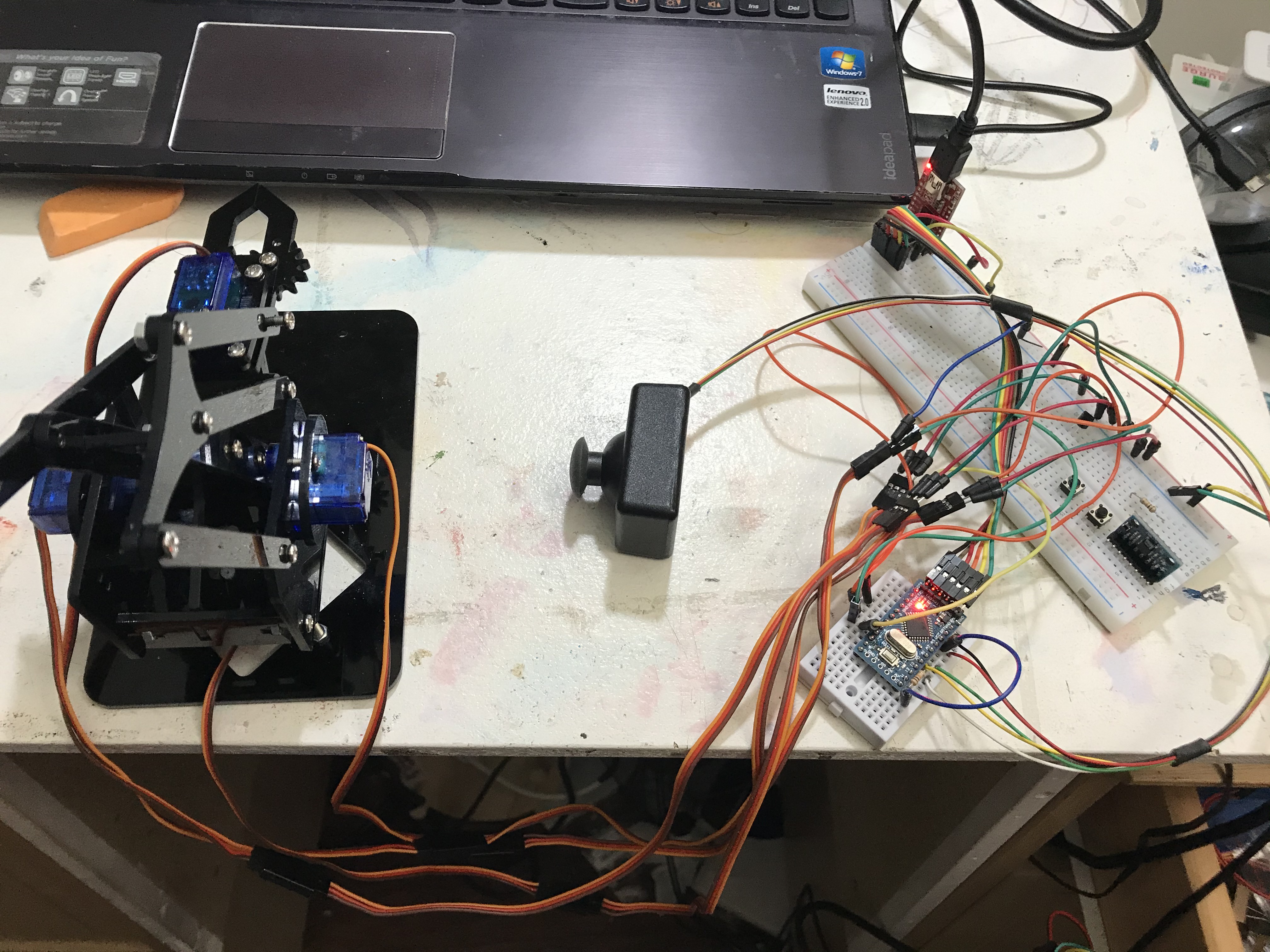
A simple robot arm project to get my 4 year old son introduced to making his own toys. Have promised him a Predator style laser gun and this will be mounted on his wrist as a grabbing tool :-)
Couldn't find much material on joystick for 4DOF robot control and so had to sped quite a bit of time with the code.
Haven't got enough options on the joystick for all 4DOF and so have limited to forward-backward, left-right & grip actions.
Happy to answer any questions :-)

_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.