////////////////////////////////////////////////////////////////
// Wireless Quiz Buzzer System //
// Copyright (C) RobSmithDev 2022 //
// GPL3 Licence //
////////////////////////////////////////////////////////////////
// Video: https://youtu.be/b3iqji1DUG0
// https://robsmithdev.co.uk
// https://youtube.com/c/robsmithdev
#include <RF24.h>
#include <DFRobotDFPlayerMini.h>
#include <SoftwareSerial.h>
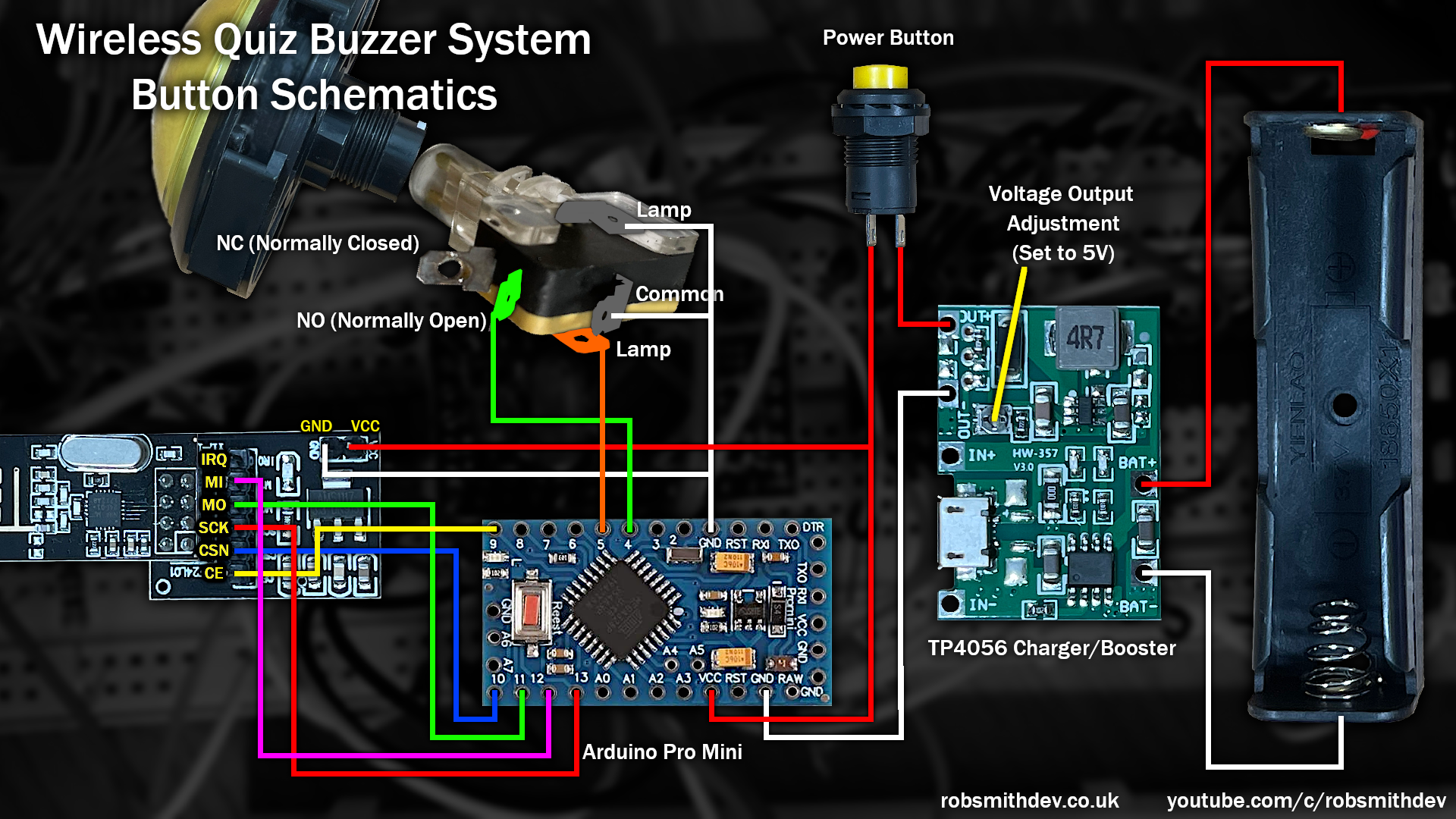
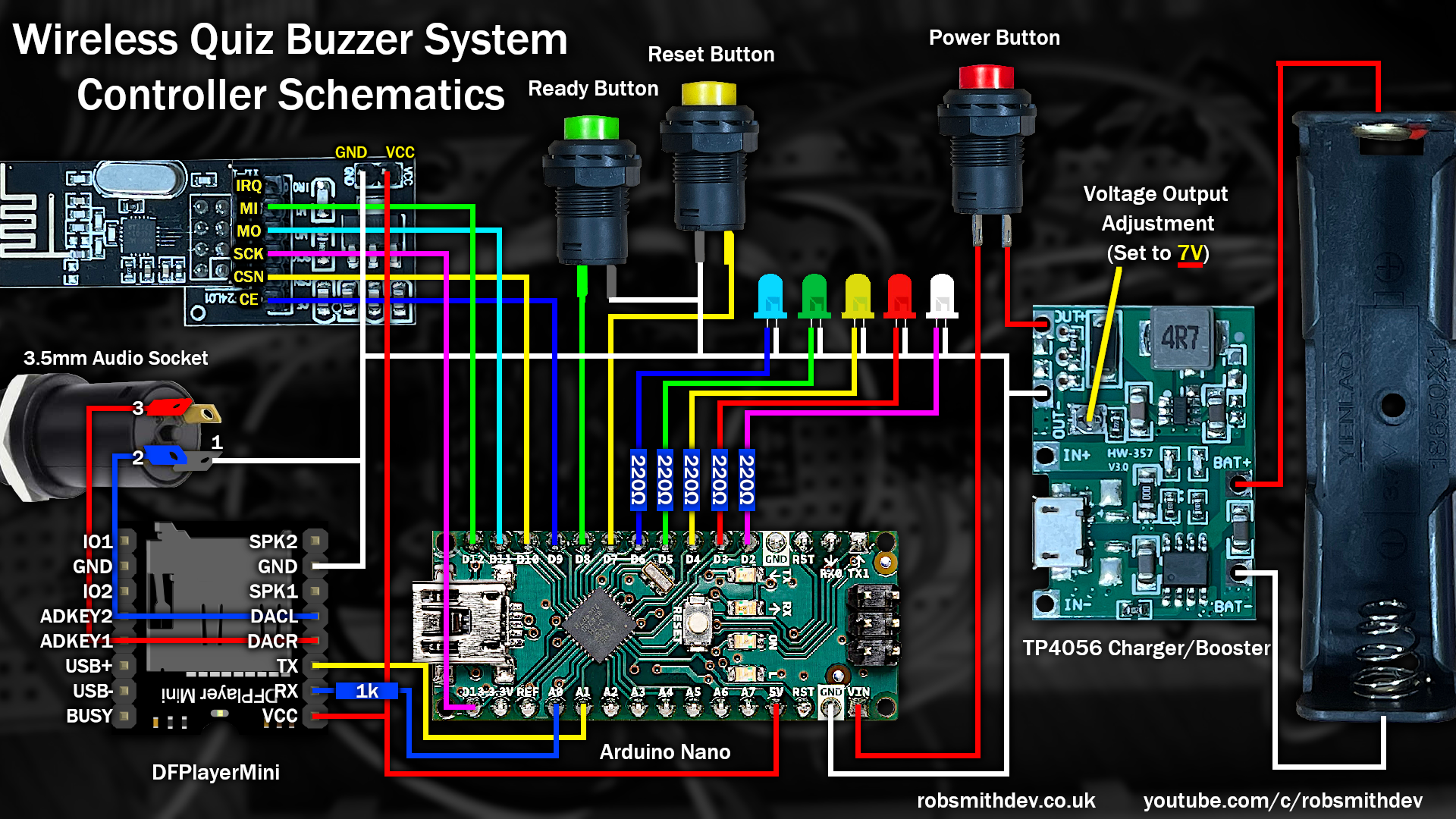
// 2 -> White LED to GND (Status)
// 3 -> RED LED to GND (Button Status)
// 4 -> YELLOW LED to GND (Button Status)
// 5 -> GREEN LED to GND (Button Status)
// 6 -> BLUE LED to GND (Button Status)
// 7 -> RESET btn to GND
// 8 -> READY btn to GND
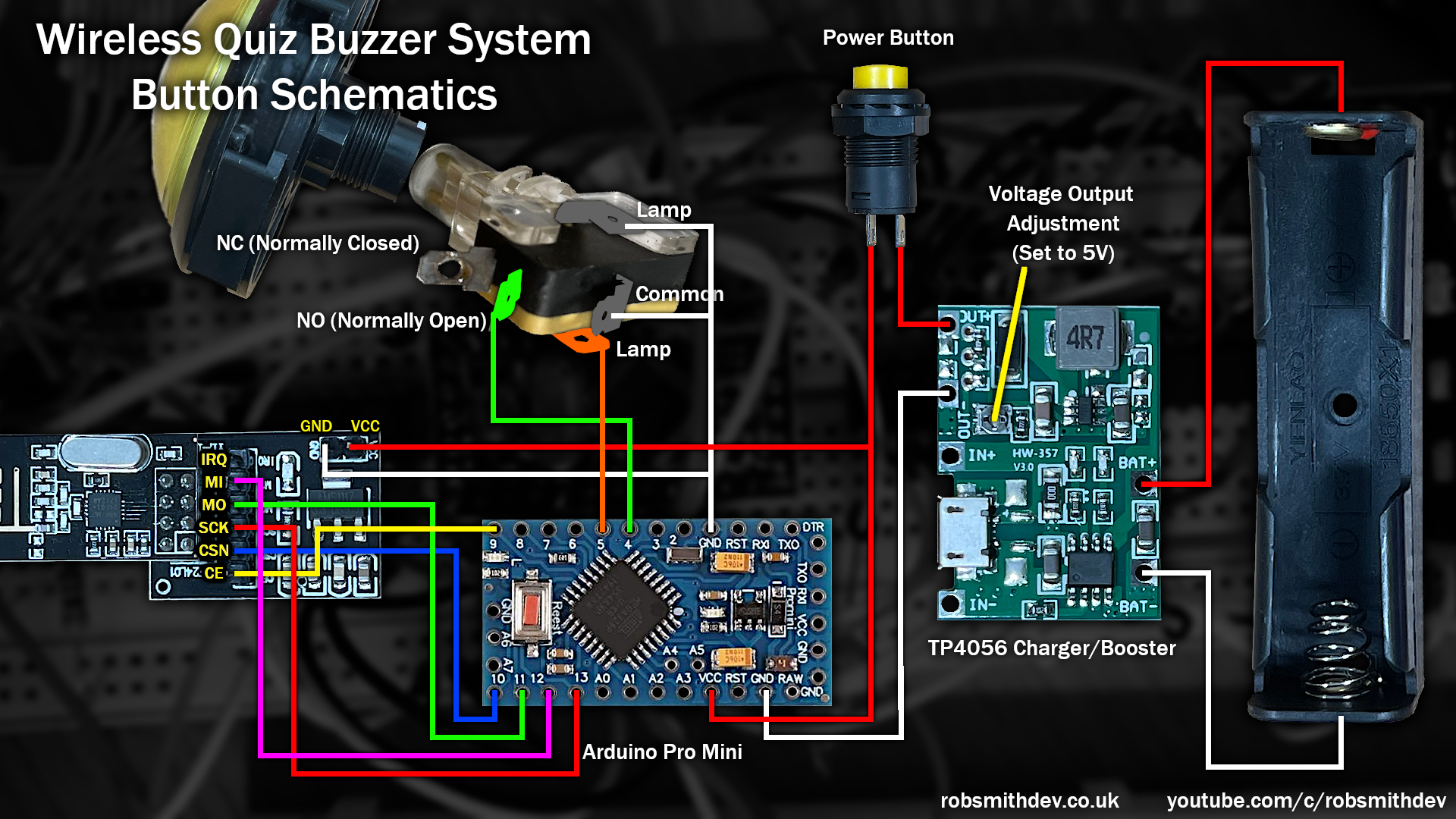
// 9 -> CE (nRF24)
// 10 -> CSN (nRF24)
// 11 -> MO (nRF24)
// 12 -> MI (nRF24)
// 13 -> SCK (nRF24)
// A0 -> 1K Reststor -> RX on DFPlayerMini
// A1 -> TX on DFPlayerMini
RF24 radio(9, 10); // CE, CSN
#define LED_STATUS 2 // Status LED
#define BTN_RESET 7
#define BTN_READY 8
#define DFMINI_TX A0 // connect to pin 2 on the DFPlayer via a 1K resistor
#define DFMINI_RX A1 // connect to pin 3 on the DFPlayer
SoftwareSerial softwareSerial(DFMINI_RX, DFMINI_TX);
// Player
// Tip: If you have any problems with the DFPlayerMini, power it from the Arduino's 3.3v pin rather than 5v.
DFRobotDFPlayerMini player;
// LED pins
unsigned char BTN_LEDS[4] = {3, 4, 5, 6};
// LED status type
enum LedStatus : unsigned char { lsOff = 0, lsOn = 1, lsFlashing = 2 };
// Status we want to share with the buttons
LedStatus ledStatus[4] = {lsOff, lsOff, lsOff, lsOff};
bool buttonEnabled[4] = {false, false, false, false};
bool buttonConnected[4] = {false, false, false, false};
bool hasAnswered[4] = {false, false, false, false};
unsigned long lastContact[4] = {0, 0, 0, 0};
// Last loop time
unsigned long lastLoopTime = 0;
// System status
bool isReady = false;
// Is audio playing?
bool isPlaying = false;
bool dfPlayerReady = false;
// searches the radio spectrum for a quiet channel
bool findEmptyChannel() {
Serial.write("Scanning for empty channel...\n");
char buffer[10];
// Scan all channels looking for a quiet one. We skip every 10
for (int channel = 125; channel > 0; channel -= 10) {
radio.setChannel(channel);
delay(20);
unsigned int inUse = 0;
unsigned long testStart = millis();
// Check for 400 ms per channel
while (millis() - testStart < 400) {
digitalWrite(LED_STATUS, millis() % 500 > 400);
if ((radio.testCarrier()) || (radio.testRPD())) inUse++;
delay(1);
}
// Low usage?
if (inUse < 10) {
itoa(channel, buffer, 10);
Serial.write("Channel ");
Serial.write(buffer);
Serial.write(" selected\n");
return true;
}
}
return false;
}
// Sends a new ACK payload to the transmitter
void setupACKPayload() {
// Update the ACK for the next payload
unsigned char payload[4];
for (unsigned char button=0; button<4; button++)
payload[button] = (buttonEnabled[button] ? 128 : 0) | ledStatus[button];
radio.writeAckPayload(1, &payload, 4);
}
// Check for messages from the buttons
void checkRadioMessageReceived() {
// Check if data is available
if (radio.available()) {
unsigned char buffer;
radio.read(&buffer, 1);
// Grab the button number from the data
unsigned char buttonNumber = buffer & 0x7F; // Get the button number
if ((buttonNumber >= 1) && (buttonNumber <= 4)) {
buttonNumber--;
// Update the last contact time for this button
lastContact[buttonNumber] = lastLoopTime;
// And that it's connected
buttonConnected[buttonNumber] = true;
// If the button was pressed, was enabled, hasn't answered and the system is ready for button presses
if ((buffer & 128) && (buttonEnabled[buttonNumber]) && (!hasAnswered[buttonNumber]) && (isReady)) {
// No longer ready
isReady = false;
if (dfPlayerReady) {
player.play(buttonNumber + 1);
isPlaying = true;
}
// Signal the button was pressed
hasAnswered[buttonNumber] = true;
// Change button status
for (unsigned char btn = 0; btn < 4; btn++)
ledStatus[btn] = (btn == buttonNumber) ? lsOn : lsOff;
// Turn off the ready light
digitalWrite(LED_STATUS, LOW);
}
}
setupACKPayload();
}
}
// Setup the controller
void setup() {
// put your setup code here, to run once:
Serial.begin(57600);
while (!Serial) {};
// small delay to allow the DFPlayerMini to boot
delay(1000);
// For the DFPlayerMini
softwareSerial.begin(9600);
if (player.begin(softwareSerial)) {
player.volume(30);
dfPlayerReady = true;
}
// Setup the radio device
radio.begin();
radio.setPALevel(RF24_PA_LOW);
radio.enableDynamicPayloads();
radio.enableAckPayload();
radio.setDataRate(RF24_250KBPS);
radio.setRetries(4, 8);
radio.maskIRQ(false, false, false); // not using the IRQs
// Setup our I/O
pinMode(LED_STATUS, OUTPUT);
pinMode(BTN_RESET, INPUT_PULLUP);
pinMode(BTN_READY, INPUT_PULLUP);
if (!radio.isChipConnected()) {
Serial.write("RF24 device not detected.\n");
} else {
Serial.write("RF24 detected.\n");
// Trun off the LED
digitalWrite(LED_STATUS, LOW);
// Now setup the pipes for the four buttons
char pipe[6] = "0QBTN";
radio.openWritingPipe((uint8_t*)pipe);
pipe[0] = '1';
radio.openReadingPipe(1, (uint8_t*)pipe);
for (char channel = 0; channel < 4; channel++) {
pinMode(BTN_LEDS[channel], OUTPUT);
digitalWrite(BTN_LEDS[channel], LOW);
}
// Start listening for messages
radio.startListening();
// Find an empty channel to run on
while (!findEmptyChannel()) {};
// Start listening for messages
radio.startListening();
// Ready
digitalWrite(LED_STATUS, LOW);
setupACKPayload();
}
}
// Main loop
void loop() {
lastLoopTime = millis();
if (digitalRead(BTN_RESET) == LOW) { // Reset button pressed?
// Turn all buttons off
for (unsigned char button = 0; button < 4; button++) {
ledStatus[button] = lsOff;
buttonEnabled[button] = false;
hasAnswered[button] = false;
if (isPlaying) {
player.stop();
isPlaying = false;
}
}
isReady = false;
digitalWrite(LED_STATUS, LOW);
} else if (digitalRead(BTN_READY) == LOW) { // Ready button pressed
// Make the buttons flash that havent answered yet
for (unsigned char button = 0; button < 4; button++) {
buttonEnabled[button] = !hasAnswered[button];
ledStatus[button] = hasAnswered[button] ? lsOff : lsFlashing;
}
isReady = true;
if (isPlaying) {
player.stop();
isPlaying = false;
}
digitalWrite(LED_STATUS, HIGH);
}
// Update our LEDs and monitor for ones that are out of contact
for (unsigned char button = 0; button < 4; button++) {
// If the button is connected
if (buttonConnected[button]) {
// If its been 1 second since we heard from it
if (lastLoopTime - lastContact[button] > 1000) {
// Disconnect it
buttonConnected[button] = false;
digitalWrite(BTN_LEDS[button], LOW);
} else {
// Set the LED to match the state we have it in
digitalWrite(BTN_LEDS[button], (ledStatus[button] == lsOn) || ((ledStatus[button] == lsFlashing) && (lastLoopTime & 255) > 128));
}
} else {
// For disconnected ones we just give a short 'blip' once per few second
digitalWrite(BTN_LEDS[button], (lastLoopTime & 2047) > 2000);
}
}
// Check for messages on the 'network'
checkRadioMessageReceived();
}











_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.