
Hardware components | ||||||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
 |
| |||||
| ||||||
After you have all your components you can start building it. It is very easy and took me 30min to complete it and if my cat did not annoyed me I guess I could do it faster. First you glue the one servo to the breadboard.
The next step is to take a servo arm and glue it to the other servo.
After you let it dry for a few moment you can mount the servo on the servo you mounted on the breadboard.
Then you also mount the servo arm (included with the servo's) and mount it on the second servo. Now you can mount the laser.
After this the laser turret is completed.
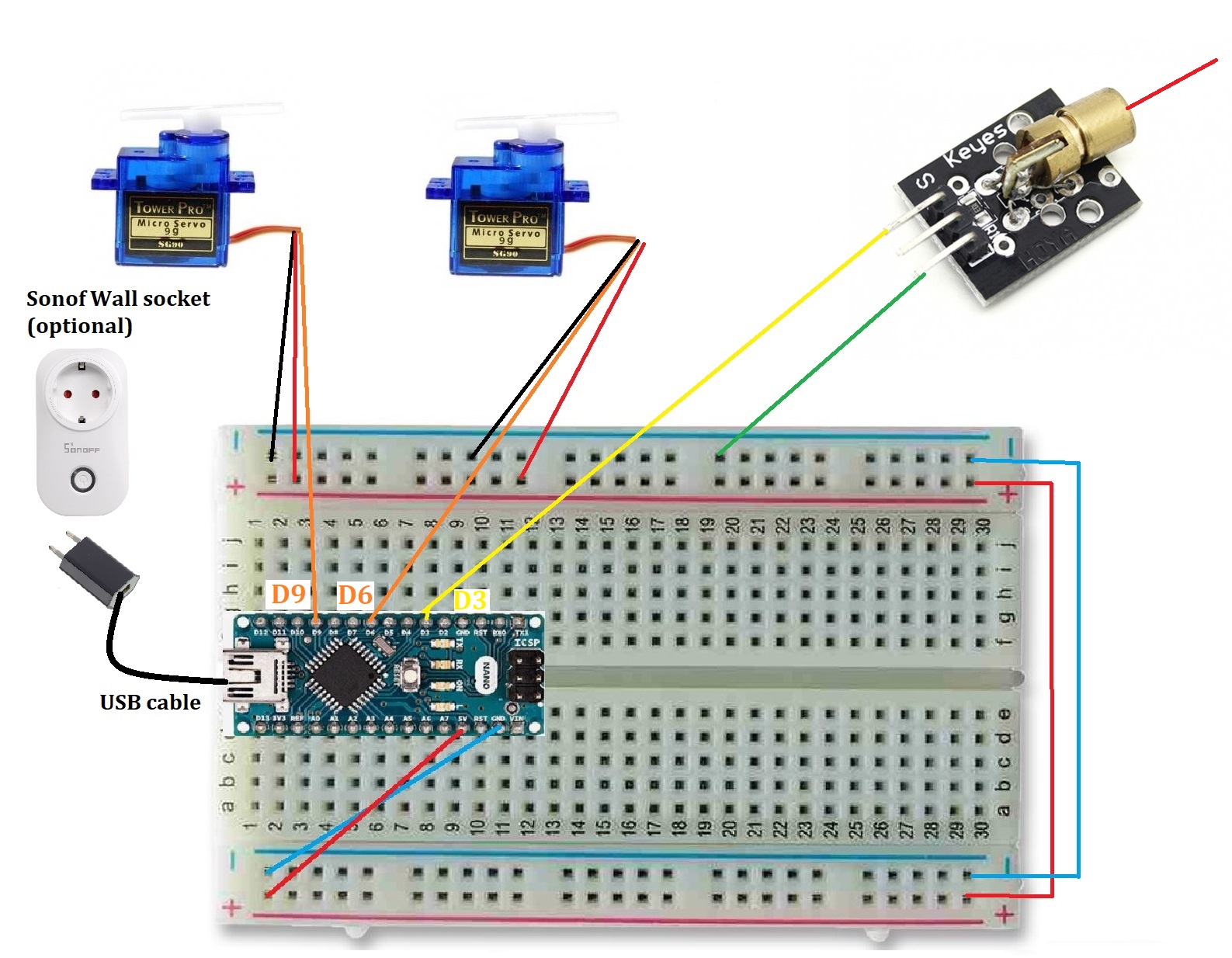
Mount the Arduino Nano on the breadboardYou can find the wiring diagram in the description. You should have some male-male connectors and some male-female ones. This way you can connect everything without soldering...
Uploading the codeDownload the Arduino sketch and load it to the Arduino Nano. The original code is made by Lucas Berbesson. I did one adaptation to power the laser diode with a PWM pin. This way you can dim the laser strength in the software (I did not have the right resistor laying around).
but credit where credit is due => thank you Lucas Berbesson to share the solid code with the interwebs.
In the first part of the code you can change some settings. You can play around with it and learn some thing or two from the code.
Optional => voice activated (Alexa and Google Home) and timersI used a real simple solution by using a WIFI smart socket to control it with Alexa and Google Home. You can also set timers to turn on/off the wall socket. When the Arduino is powered on the laser starts to move.
You can find the wall socket and all other parts in the "parts" section :p





{kind=link}
Comments