



Hardware components | ||||||
 |
| × | 1 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
SPECULAR is a set of modified glasses and pair of shoes equipped with modern Ultrasonic Sensors and High Efficiency chips to detect obstacles both at the eye level and in front of the lower part of the body. It alerts the wearer if an obstacle comes within proximity via haptic feedback.
1.1 Background of the Project
Many of the existing solutions to provide mobility to the visually impaired comprises of walking sticks and crutches which result in use of hands. I wanted to develop a hands-free solution where both the hands of the user are completely free for other purposes. Also, many permanent solutions to blindness include expensive surgeries and equipment such as artificial eye which are out of reach for the economically weaker sections of the society hence the solution should be commercially viable to every part of the society.
1.2Significance of the Project
It can enable the visually impaired to lead a normal life without anyone’s dependence for daily tasks. It has been through 3 iterations each better than the previous and with significant improvement in functionality and comfort for the wearer. If implemented on a large scale this could be a revolutionary product which can bring a dramatic change in the life of a visually disabled.
2. MethodologyLike every project one needs a roadmap to successfully tackle all the different stages of undertaking a project. Mentioned below are the series of steps that I took in order to completely explore the potential of the project and make an impact on the society.
2.1 Problem Statement
“A Visually Impaired person needs to depend on a caretaker for their daily tasks including assistance in locomotion which creates a sense of fear and anxiety. An Innovative and cheap solution is required which breaks the bondage and makes the person Independent and capable enough to complete his/her daily tasks.”
2.2 Ideation and Design
I started finding existing solutions for the stated problem on the internet and found out that none of the solutions were cheap enough and available to underprivileged visually disabled people of the society. This led to the primary aim of the innovation, which is to make a device capable of guiding an individual around obstacles and still be accessible to the underprivileged parts of the society.
I came up with the idea that if we attach a short-range Ultrasonic obstacle detector in front of a head contraption along with a microcontroller and a battery then one can detect the distance between the obstacle and the spectacles. To alert the wearer of the impending danger I could implement a small speaker or a haptic feedback motor. After some researching, I found that around 38.24 of people who are visually impaired also face hearing disabilities hence I chose to install the haptic feedback motor instead of the speaker to alert the wearer. This will cater to a wider target audience and result in less annoyance, due to the sound of speaker, to the surrounding of the wearer.
2.3 Prototype
After thorough ideation and designing, I landed on a feasible idea. Keeping in mind the cost factor of the innovation and accessibility I started to bring the ideas from paper to prototype and testing. There were many difficulties which I had to overcome to arrive at the final prototype. After every prototype was made, I carried out thorough testing and got great feedback from potential target audience, which led to better implementations.
- 2.3.1 Proof of concept
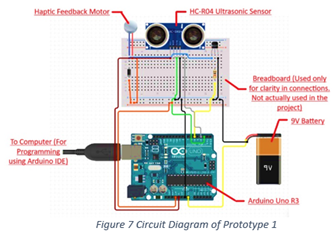
The first raw prototype included only the spectacles and was made from cardboard to test proof of concept and liability. I then proceeded to make a bulk and modular design to test out various combinations of Hardware placement keeping in mind the comfort of the wearer along with functionality.
After number of implementations and design changes I finalized the first prototype as illustrated above.
Thorough testing on users revealed that any obstacle below the waist level will be undetected by the spectacles and hence the wearer could tip over and fall. This flaw in the design led to the development of the second prototype.
- 2.3.2 Addition of the shoe
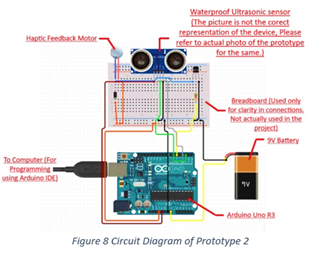
The second prototype involve the addition of a shoe which was modified to work on the same principal as the spectacles which is to alert the wearer if any obstacles came in front of the lower part of the body.
Since the shoe must go through a lot of wear and tear and is susceptible to water puddles, I used a waterproof Ultrasonic sensor which also works on the same Scientific principles as the one used in spectacles. After connecting all the components, the prototype was ready for further testing. The final prototype of the shoe is illustrated above
- 2.3.3 Final Prototype
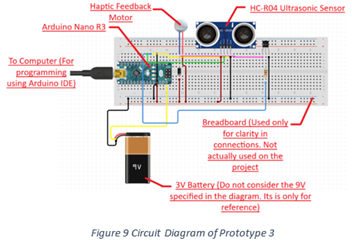
The addition of the shoe had proven to be very effective and increased the confidence of the user in using the solution. I went to a nearby Blind people’s society to test out the innovation and gather feedback. The main feedback that I received was, the spectacles were too bulky and would be uncomfortable for long periods of use. Using this positive feedback, I redesigned the model and reduced the weight of the prototype by using a smaller microcontroller and a smaller battery. I balanced out the weight on both sides of the temple of the frame to make it more comfortable in long use as illustrated below
2.4 Future Innovation
There are endless paths that this project could take in the future. As this was a raw prototype made with readily available infrastructure there is a scope of development in the integration of the microcontroller with the Ultrasonic sensor using custom printed circuit boards to make it even smaller and easily scalable. As this project is developed more, the manufacturing cost will decrease further making it even more accessible.
Addition of GPS receivers to the spectacles could help the user navigate around city streets. If user is approaching a right turn, then the right side of the spectacles could be vibrated with increasing intensity as the turn approaches.
3. CodeI would like to close this proposal by summarizing the impact such a proposal can make on the world. Besides improving the quality of life for a visually impaired, such a project opens new doors of opportunities and give them a glimmer of hope to do something for the society. It makes them feel cared for and an important part of the world. Despite the challenges thrown at them, such an Innovation helps them climb the ladder of life without depending on someone else. It gives them an identity of their own, a reason to move forward and that is all the difference in the world.
Thank You!





_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.