



Hardware components | ||||||
 |
| × | 1 | |||
_PnKPri8a6q.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 3 | ||||
| × | 4 | ||||
Update 2021
The new version of the pedals has a HID-interface and an improved design. The advanced Hall effect sensors module provides very precise control. Details on my website.
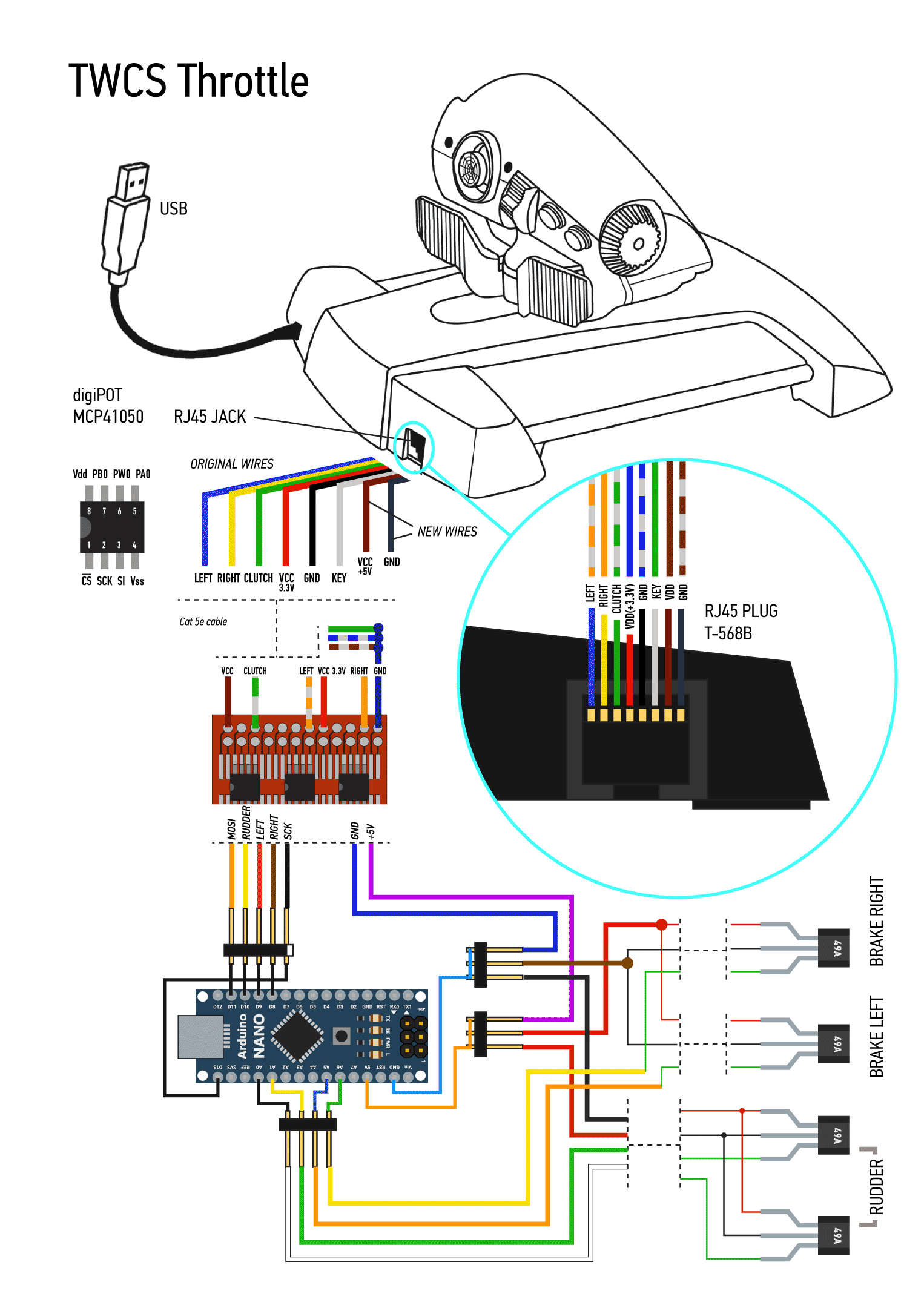
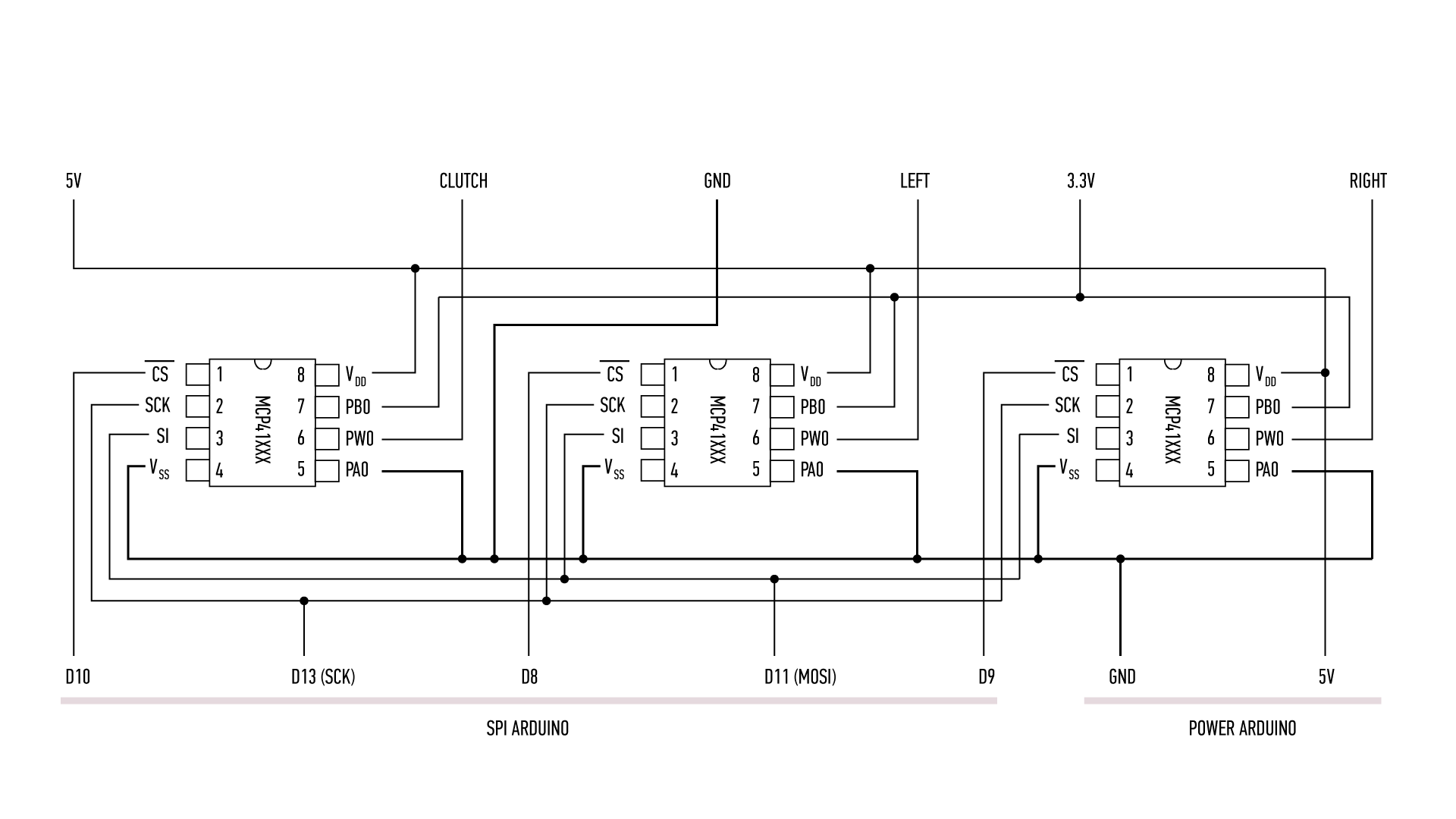
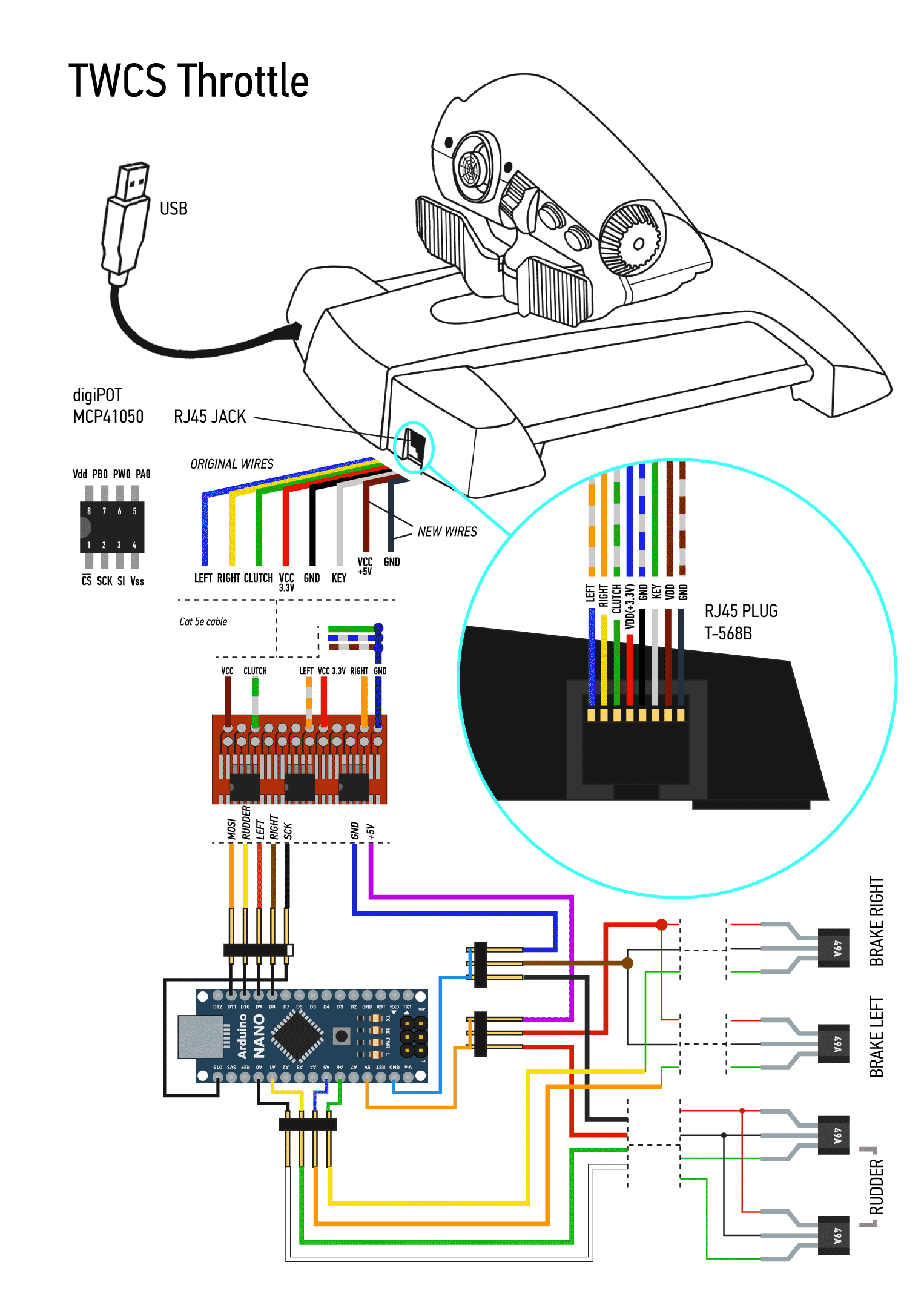
Hi, flight simmers! I invented and made pedals for an aircraft simulator, the main function of which is performed by Arduino. And I really want to share this development with you. It turned out that such pedals can be made in two days, but it takes two weeks to describe the process of creating them. Therefore, I made several videos showing this process in as much detail as possible.
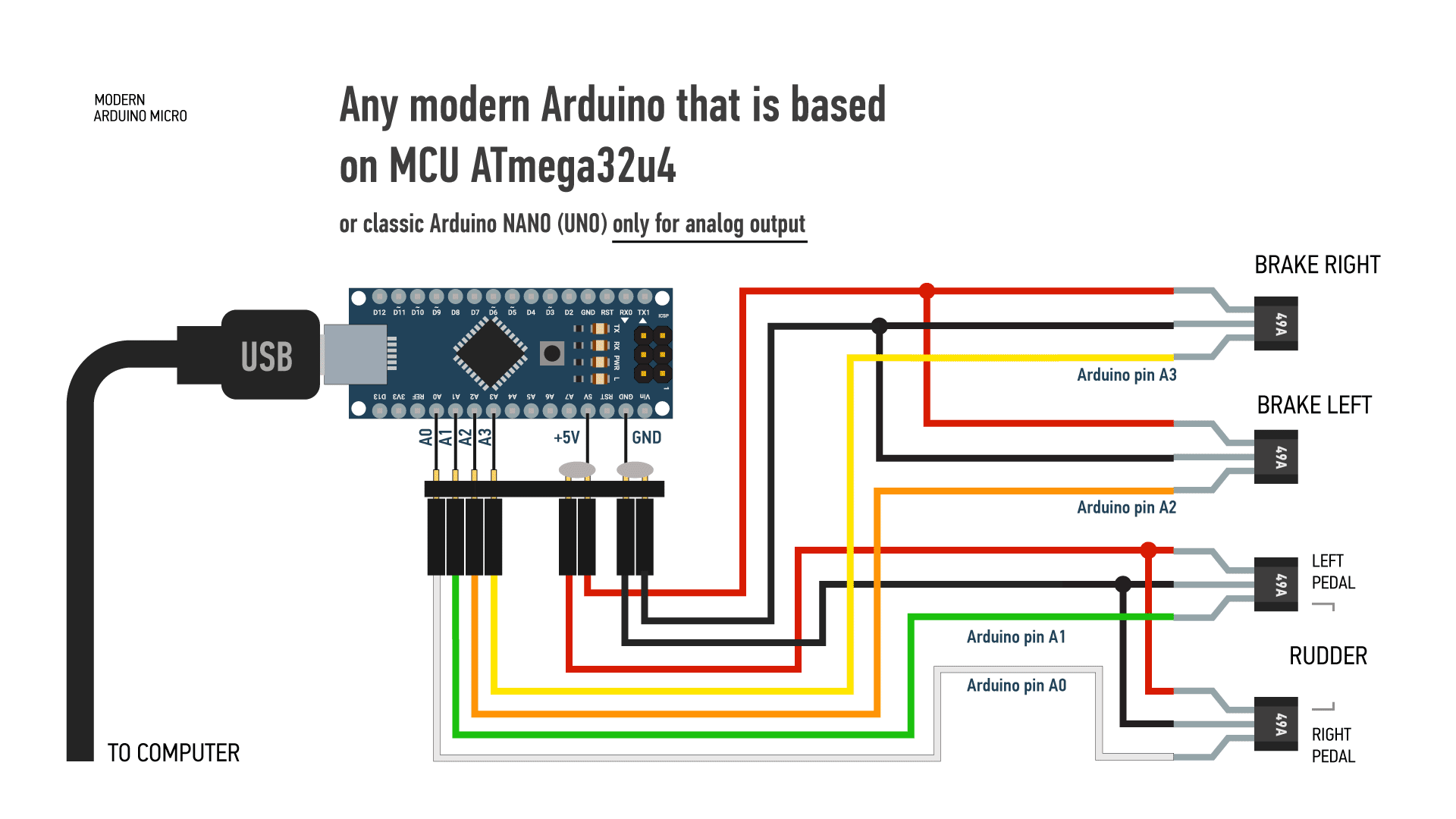
Making pedalsArduino can be connected to the flight simulator in two ways. Link to digital connection using ArduinoJoystickLibrary and Arduino Micro board here.
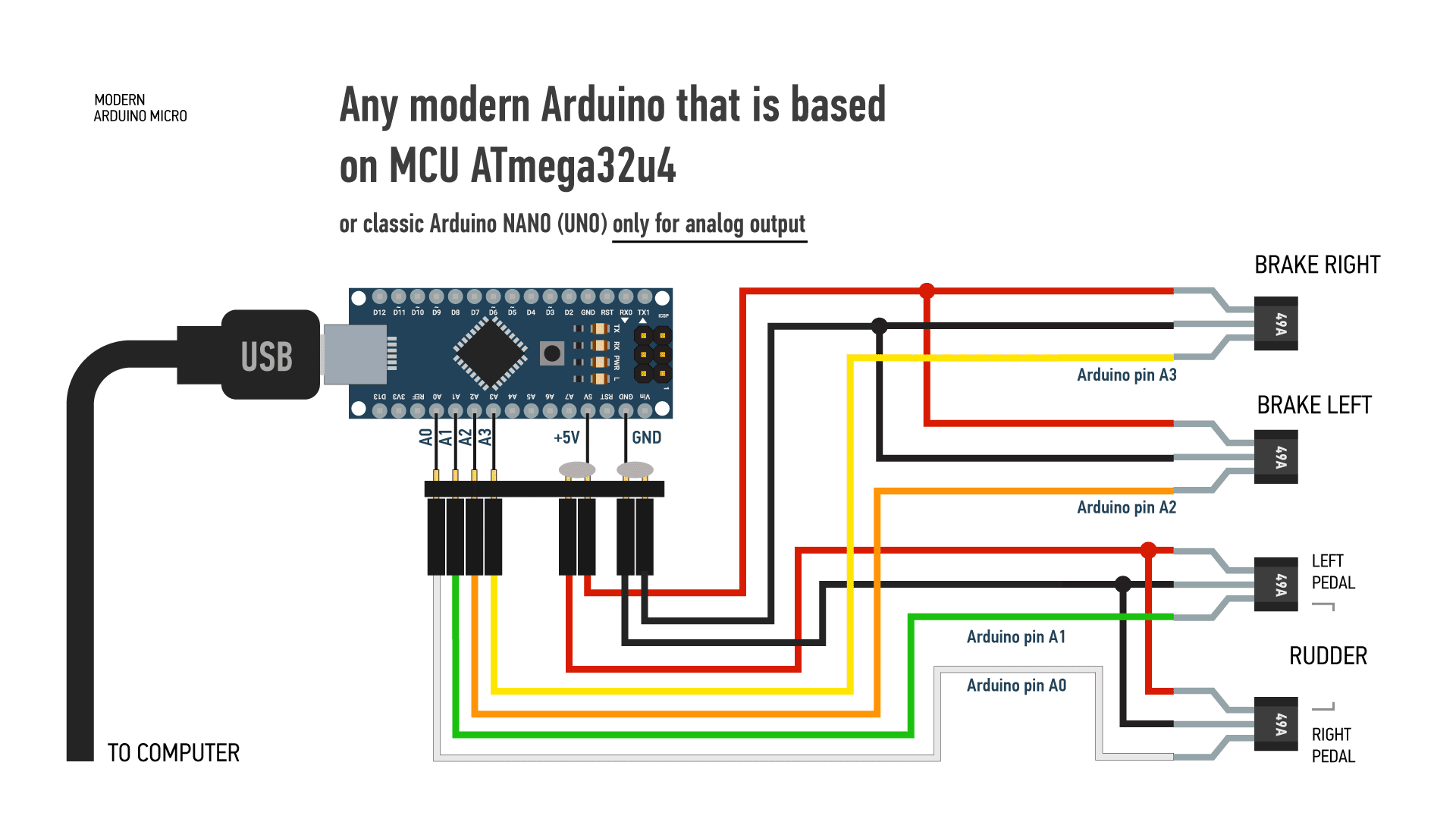
I connect my pedals with an analog connection. And the sketch given here refers to this connection method.
Both of these methods, creating a circuit and configuring sensors are shown in the following video.
Sensors and electronicsI am very interested in your opinion on this design, please leave your comments.






{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.