



Hardware components | ||||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
ABOUT THE PROJECT:
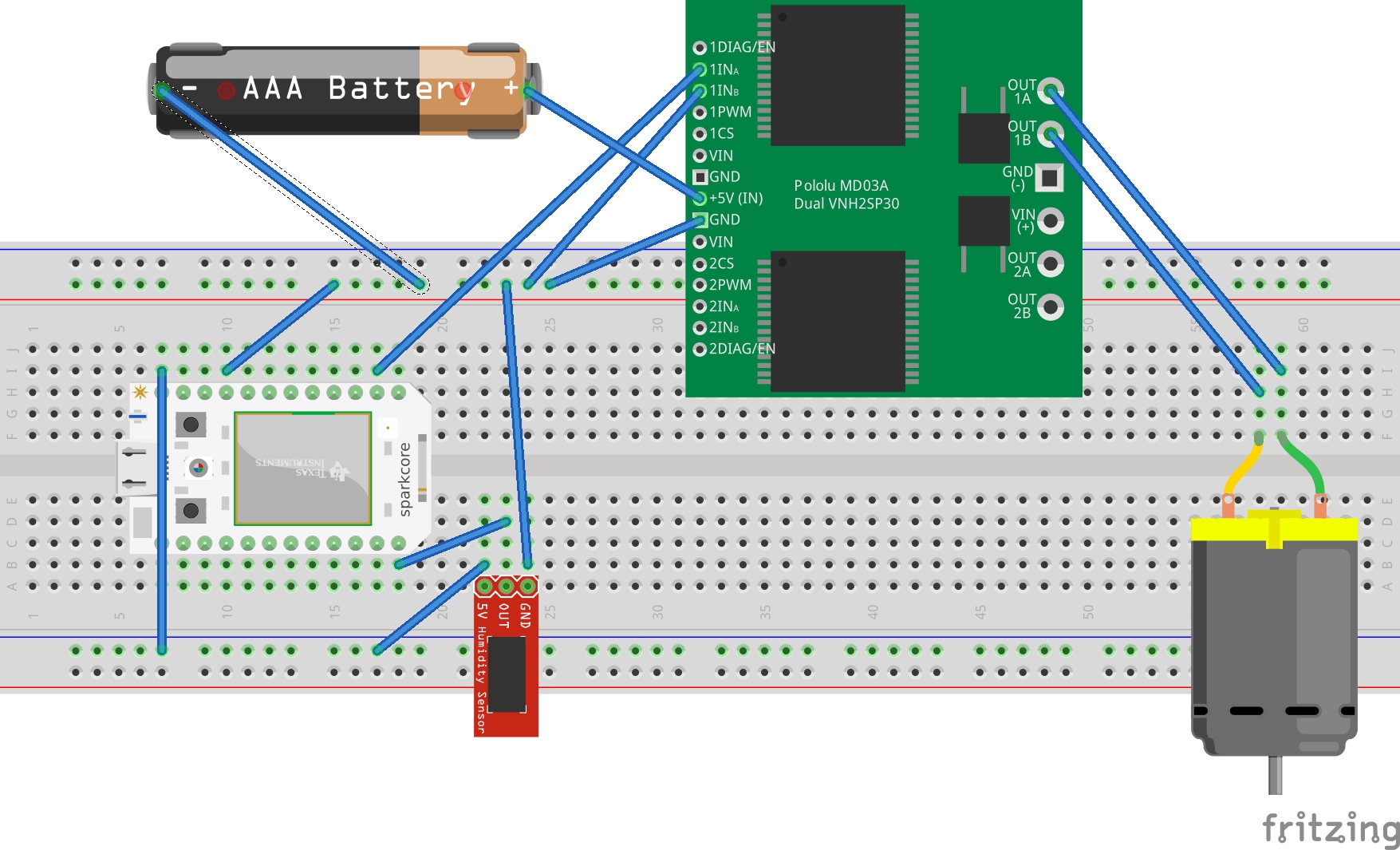
Smart Irrigation module is a prototype system based on Spark Core. It continuously senses the moisture level in the soil using a soil moisture sensor. Whenever the moisture level is in between the configured maximum range and minimum range, it turns on the submersible pump for a specified duration.
The maximum moisture level, minimum moisture level and the duration at which the pump should be turned on can be configured over internet.
Soil Moisture Sensor:
This sensor monitors the soil moisture level continuously. It sends this moisture data to the particle core for further processing.
Submersible Pump:
The submersible pump is turned on to supply water when moisture level is below the desired level . Based on the moisture data obtained from the sensor, the pump can be turned ON/OFF. A motor driver is used to drive the pump since particle core cannot provide sufficient current.
Spark/Particle core:
It is the heart of the system where all the processing is done.






{kind=link}
Comments
Please log in or sign up to comment.