#include <SoftwareSerial.h>
#include "ATT_IOT_FONA.h"
#include "ATT_MQTT.h"
#include "ATT_IOT_GPRS.h"
#include <SPI.h>
#define deviceId "x0Oq5Nf4rbnQZJC3YcWYzbJb"
#define clientId "vitronics_KJOcxvkQ"
#define clientKey "DGfg9VmT"
#define FONA_APN "web.pro.be"
#define FONA_USERNAME ""
#define FONA_PASSWORD ""
#define FONA_RX 2
#define FONA_TX 3
#define FONA_RST 5
SoftwareSerial fonaSS = SoftwareSerial(FONA_TX, FONA_RX);
ATTDevice Device(deviceId, clientId, clientKey);
#define httpServer "api.AllThingsTalk.io"
#define mqttServer httpServer
#include <Wire.h>
#include <SPI.h>
#include <Adafruit_Sensor.h>
#include <Adafruit_BME280.h>
#define BME_SCK 13
#define BME_MISO 12
#define BME_MOSI 11
#define BME_CS 10
#define SEALEVELPRESSURE_HPA (1013.25)
#define voltageFlipPin1 6
#define voltageFlipPin2 5
#define sensorPin 1
#include "Arduino.h"
#include "SI114X.h"
SI114X SI1145 = SI114X();
Adafruit_BME280 bme;
unsigned long newTime;
unsigned long oldTime;
int pinTemp = 15;
int pinPRES = 16;
int pinHUM = 17;
int pinSL = 18;
int aiQ = 19;
int pinGVS = 0;
int avg = 0;
int flipTimer = 1000;
int niveauPin =8;
int niveau = 0;
float xniveau = 0;
const int pinNiveauSensor = A3;
int niveauPin2 =7;
int niveau2 = 0;
float xniveau2 = 0;
const int pinNiveauSensor2 = A2;
int motorPin = 9;
int motorPin2 = 10;
int motorPin3 = 11;
int lamp = 12;
int kaart = 13;
int B = 0;
int water;
int TSetMest;
int wacht;
int delayStuur;
void callback(const char* topic, const char* payload, unsigned int length);
void setup() {
pinMode(niveauPin, OUTPUT);
pinMode(niveauPin2, OUTPUT);
pinMode(motorPin, OUTPUT);
pinMode(motorPin2, OUTPUT);
pinMode(motorPin3, OUTPUT);
pinMode(lamp, OUTPUT);
pinMode(kaart,OUTPUT);
pinMode(voltageFlipPin1, OUTPUT);
pinMode(voltageFlipPin2, OUTPUT);
fonaSS.begin(19200);
Serial.begin(57600);
digitalWrite(motorPin, HIGH);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin3, HIGH);
digitalWrite(lamp, HIGH);
while (!SI1145.Begin()) {
delay(1000);
}
bool status;
// default settings
status = bme.begin();
while(!Serial && millis() < 2000); // Make sure you see all output on the monitor. After 2 sec, it will skip this step, so that the board can also work without being connected to a pc
while (! Device.InitGPRS(fonaSS, FONA_RST, F(FONA_APN), F(FONA_USERNAME), F(FONA_PASSWORD))) {
Serial.println("Retrying FONA");
}
Serial.println(F("Connected to Cellular!"));
delay(2000); // wait a few seconds to stabilize connection
while(!Device.Connect(httpServer)) // connect the device with the IOT platform.
Serial.println("retrying");
Device.AddAsset(pinTemp, "temperature", "rotary switch",false, "{\"type\": \"integer\", \"minimum\": -10.0, \"maximum\": 50.0}"); // data input to Allthingstalk app
Device.AddAsset(pinPRES, "presure", "rotary switch",false, "{\"type\": \"integer\", \"minimum\": 0, \"maximum\": 1200}");
Device.AddAsset(pinHUM, "vochtigheid", "rotary switch",false, "{\"type\": \"integer\", \"minimum\": 0, \"maximum\": 100}");
Device.AddAsset(niveauPin, "niveau", "rotary switch",false, "{\"type\": \"integer\", \"minimum\": 0, \"maximum\": 100}");
Device.AddAsset(niveauPin2, "niveau Mest", "rotary switch",false, "{\"type\": \"integer\", \"minimum\": 0, \"maximum\": 100}");
Device.AddAsset(pinGVS, "GV", "rotary switch",false, "{\"type\": \"integer\", \"minimum\": 0, \"maximum\": 100}");
Device.AddAsset(pinSL, "licht sensor", "rotary switch",false, "{\"type\": \"integer\", \"minimum\": 0, \"maximum\": 1000}");
Device.AddAsset(aiQ, "lucht qualiteit", "rotary switch",false, "{\"type\": \"integer\", \"minimum\": 0, \"maximum\": 3}");
Device.AddAsset(motorPin, "motor1", "light emitting diode", true, "boolean");
Device.AddAsset(motorPin2, "motor2", "light emitting diode", true, "boolean");
Device.AddAsset(motorPin3, "motor3", "light emitting diode", true, "boolean");
Device.AddAsset(lamp, "lamp", "light emitting diode", true, "boolean");
Device.AddAsset(kaart, "kaart", "light emitting diode", true, "boolean");
while(!Device.Subscribe(callback, mqttServer, 1883)) // make certain that we can receive message from the iot platform (activate mqtt)
Serial.println("retrying");
}
void loop() {
int x = bme.readTemperature(); // measure temperature from TPH meter
Device.Send(String(x), pinTemp);
delay(1000);
int y = bme.readPressure() / 100.0F; // measure pressure from TPH meter
Device.Send(String(y), pinPRES);
delay(1000);
int z = bme.readHumidity(); // measure humidity from TPH meter
Device.Send(String(z), pinHUM);
delay(1000);
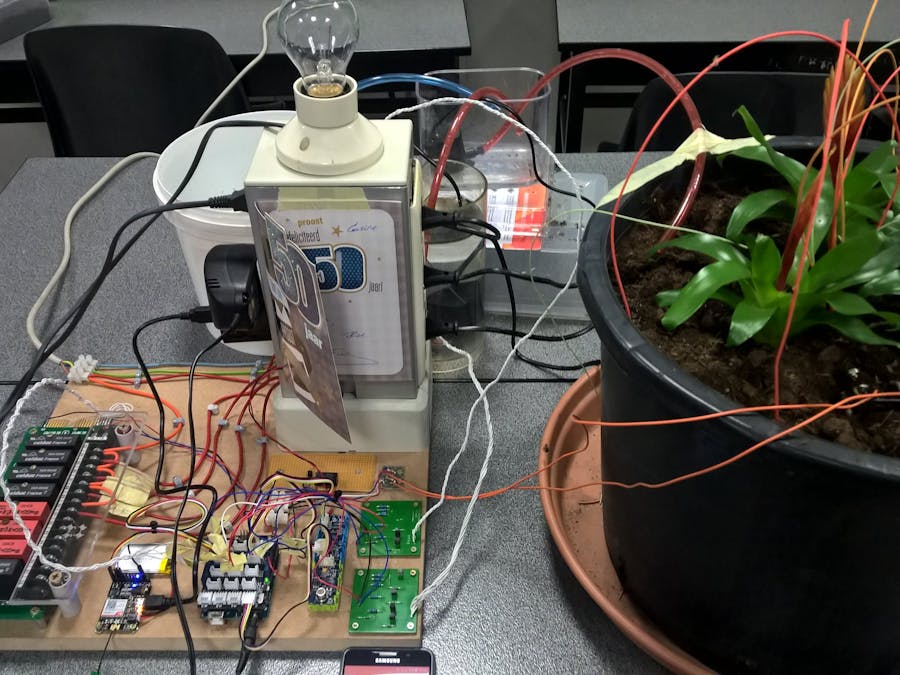
digitalWrite(niveauPin, HIGH); // water level meter activates
xniveau = analogRead(pinNiveauSensor); // measure water level
delay(5);
digitalWrite(niveauPin, LOW); // water level meter deactivates
xniveau = (xniveau*5.0)/1023.0; // from analoge to value from 0-100
if(xniveau<1.20){
niveau = 0;
}
else if (xniveau<2.20){
niveau = 10;
}
else if(xniveau<2.70){
niveau = 25;
}
else if(xniveau<3.30){
niveau = 50;
}
else if(xniveau<5){
niveau = 100;
}
Device.Send(String(niveau),niveauPin);
delay(1000);
digitalWrite(niveauPin2, HIGH); // fertillizer level meter activates
xniveau2 = analogRead(pinNiveauSensor2); // measure fertillizer level
delay(5);
digitalWrite(niveauPin2, LOW); // fertillizer level meter deactivates
xniveau2 = (xniveau2*5.0)/1023.0; // from analoge to value from 0-100
if(xniveau2<1.40){
niveau2 = 0;
}
else if(xniveau2<3.80){
niveau2 = 50;
}
else if(xniveau2<5){
niveau2 = 100;
}
Device.Send(String(niveau2),niveauPin2);
delay(1000);
setSensorPolarity(true); // activated soil moisture sensor
delay(flipTimer);
int val1 = analogRead(sensorPin); // measure of soil moisture
delay(flipTimer);
setSensorPolarity(false); // switch polarity of the soil moisture sensor
delay(flipTimer);
// invert the reading
int val2 = 1023 - analogRead(sensorPin); // measure of soil moisture
//
reportLevels(val1,val2); // compare 2 values
Device.Send(String(avg),pinGVS);
delay(1000);
int B = SI1145.ReadVisible(); // sunlight measuring
Device.Send(String(B),pinSL);
delay(1000);
Device.Process();
}
void setSensorPolarity(boolean flip){ // activate or switch polarity of the soil moisture sensor
if(flip){
digitalWrite(voltageFlipPin1, HIGH);
digitalWrite(voltageFlipPin2, LOW);
}else{
digitalWrite(voltageFlipPin1, LOW);
digitalWrite(voltageFlipPin2, HIGH);
}
}
void reportLevels(int val1,int val2){ // compare 2 values
avg = (val1 + val2) / 2;
avg=map(avg,0,1000,0,100);
}
void callback(const char* topic, const char* payload, unsigned int length)
{
String msgString(payload); //convert to string object, so we can easily compare and modify the string.
int* idOut = NULL;
idOut = &motorPin;
idOut = &motorPin2;
idOut = &motorPin3;
idOut = &lamp;
idOut = &kaart;
int pinNr = Device.GetPinNr(topic, strlen(topic));
Serial.print("Payload: "); //show some debugging.
Serial.println(msgString);
Serial.print("topic: ");
Serial.println(topic);
Serial.print("pin: ");
Serial.println(pinNr);
if (pinNr == motorPin) //check for which asset we received an actuator so that we can perform the correct actuation.
{
msgString.toLowerCase(); //to make certain that our comparison later on works ok (it could be that a 'True' or 'False' was sent)
if (msgString == "false") {
digitalWrite(motorPin, LOW);//change the led
Device.Send(String("true"),motorPin);
delay(1000);
digitalWrite(motorPin, HIGH);
digitalWrite(motorPin2, LOW);
delay(20000);
digitalWrite(motorPin2, HIGH);
digitalWrite(motorPin3, LOW);
delay(21000);
digitalWrite(motorPin3, HIGH);
idOut = &motorPin;
}
else if (msgString == "true") {
digitalWrite(motorPin, HIGH);
idOut = &motorPin;
}
}
if (pinNr == motorPin2) //check for which asset we received an actuator so that we can perform the correct actuation.
{
msgString.toLowerCase(); //to make certain that our comparison later on works ok (it could be that a 'True' or 'False' was sent)
if (msgString == "false") {
digitalWrite(motorPin2, LOW); //change the led
idOut = &motorPin2;
}
else if (msgString == "true") {
digitalWrite(motorPin2, HIGH);
idOut = &motorPin2;
}
}
if (pinNr == motorPin3) //check for which asset we received an actuator so that we can perform the correct actuation.
{
msgString.toLowerCase(); //to make certain that our comparison later on works ok (it could be that a 'True' or 'False' was sent)
if (msgString == "false") {
digitalWrite(motorPin3, LOW); //change the led
idOut = &motorPin3;
}
else if (msgString == "true") {
digitalWrite(motorPin3, HIGH);
idOut = &motorPin3;
}
}
if (pinNr == lamp) //check for which asset we received an actuator so that we can perform the correct actuation.
{
msgString.toLowerCase(); //to make certain that our comparison later on works ok (it could be that a 'True' or 'False' was sent)
if (msgString == "false") {
digitalWrite(lamp, LOW); //change the led
idOut = &lamp;
}
else if (msgString == "true") {
digitalWrite(lamp, HIGH);
idOut = &lamp;
}
}
if (pinNr == kaart) //check for which asset we received an actuator so that we can perform the correct actuation.
{
msgString.toLowerCase(); //to make certain that our comparison later on works ok (it could be that a 'True' or 'False' was sent)
if (msgString == "false") {
digitalWrite(kaart, LOW); //change the led
idOut = &kaart;
}
else if (msgString == "true") {
digitalWrite(kaart, HIGH);
idOut = &kaart;
}
}
if(idOut != NULL) //also let the iot platform know that the operation was succesful: give it some feedback. This also allows the iot to update the GUI's correctly & run scenarios.
Device.Send(msgString, *idOut);
}




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)










{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.