


Hardware components | ||||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 6 | |||
Software apps and online services | ||||||
| ||||||
.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| |||||
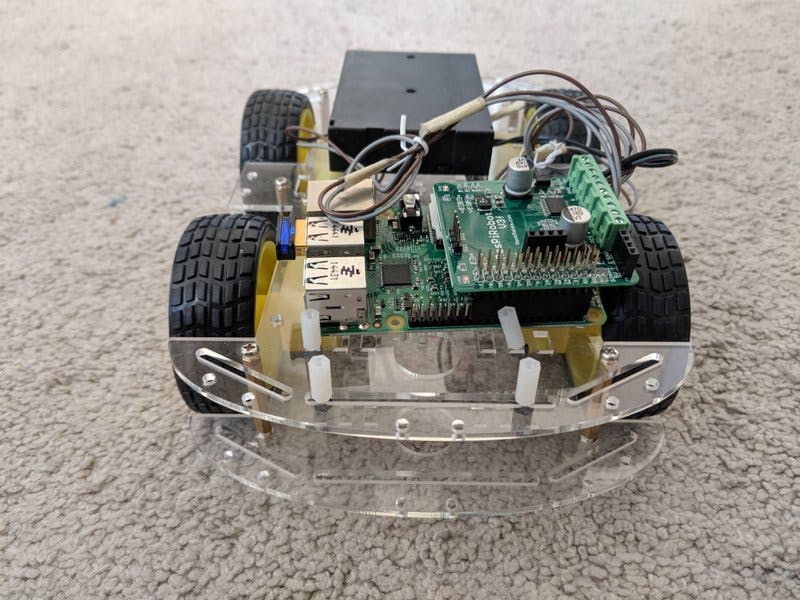
This project is aimed at creating a robot based running ROS which allows us to turn any generic robot hardware platform into a smart robot.
Connect the 9V battery pack to the +V and GND pins of the RasPiRobot Board V3 (check board documentation for clarification).
Connect the left motors to L pins and the right motors to R pins of the RasPiRobot Board.
Plug the RasPiRobot Board on top of the Raspberry Pi 2.
Software Installation- Install Ubuntu Core 16 on the RPi 2 - https://developer.ubuntu.com/core/get-started/raspberry-pi-2-3
a. Dont connect other boards while doing this.
b . Sufficient power (2A USB) is required for working with the raspberry pi 2.
c. Required Libraries - gcc, g++, python, git
- SSH onto the raspberry pi - ssh @
a. Need the private key in ubuntu core account, it should not ask for password(the password does not work)
b. To get apt-get and other applications, run sudo classic to get the classic ubuntu environment.
- Install the ROS Kinetic using the generic ARM installation - http://wiki.ros.org/kinetic/Installation/Ubuntu]
- Install the RaspiRobot V3 drivers - https://www.monkmakes.com/rrb3/
cd ~git clone https://github.com/simonmonk/raspirobotboard3.gitcd raspirobotboard3/pythonsudo python setup.py install
- Clone this repository and run
catkin_makein the repository.
- SSH onto the RPi in 3 separate terminal windows.
- Terminal 1
a. Run sudo classic
b. Start the roscore. roscore
- Terminal 2
a. Run sudo classic
b. Navigate to the project repo folder.
c. Run catkin_make and then source ./devel/setup.bash. d. Run rosrun robot_motion_control node_keyboard_motion_controller.py. This starts the keyboard inputs for controlling the robot.
- Terminal 3
a. Run sudo classic
b. Run sudo su. We need to do this as the driver library needs root access to manipulate IOs.
c. Navigate to the project repo folder, run source ./devel/setup.bash.
d. Run rosrun rpi_support node_raspirobotv3_driver.py. This starts the motor control part of the robot.
- In terminal 2, type in the control commmands
a. F - Move forward
b. B - Move backward
c. L - Move right
d. R - Move left
e. S - Stop
References



Comments
Please log in or sign up to comment.