


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 4 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
| ||||||
Youtube:- Click Here
Hackster:- Click Here
Watch Video on YoutubeLED Strip:- Click Here
IR Remote Code Generator:- Click Here
IntroductionIn this project I will show you Make LED Strip and Glow LED using Various Function using Infrared (IR) Remote and See Values in Serial Monitor.
You can assign different-different remote button and Glow LED Using different Different Function.
The remotes which we use in our home are basically made of IR transmissions for example TV remote, DVD remote, Sound System remote etc. But these signals never interfere with each other because every key in the remote control has unique operation code in Hexadecimal format. By decoding these signals we can know what is the unique code of the key. By knowing the codes we can implement several applications where we can control with same remote.
Working on BasicFirst of all you need to know the control codes of your remote control.
Connect only the IR sensor and run his code. Open the Serial Monitor and point the remote control to the receiver. Press the buttons and the respective codes will appear. Sometimes the code 0xffffffff can appear because you have pressed the button for too long.
To get the Code
Check on Arduino.cc:- Click Here
Watch on Youtube:- Click Here
Then connect the LED and run the code, where you have to insert the codes of the two buttons you want to use.
IR remote has a button and a microcontroller with IR LED attached. When a button is pressed, a microcontroller identified the button and sends the corresponding modulated signals (codes) to the IR LED. Then, the IR LED sends it to the IR receiver in the appliance.
System in the appliance demodulate the signals(codes) and the checks the function corresponding to it and executes it. Each function has a different code.
Every IR operated appliance has different codes for different function.
UsageThere are Multiple use of the Project:-
- You can display IR Remote signal and Decode and display it on Serial Monitor if it is not assigned in the Program.
- When you press serval button you can Glow any LED And Make Various type of Function like a LED Strip.
- You can also run multiple function by assigning in Program.
Follow the Steps:-
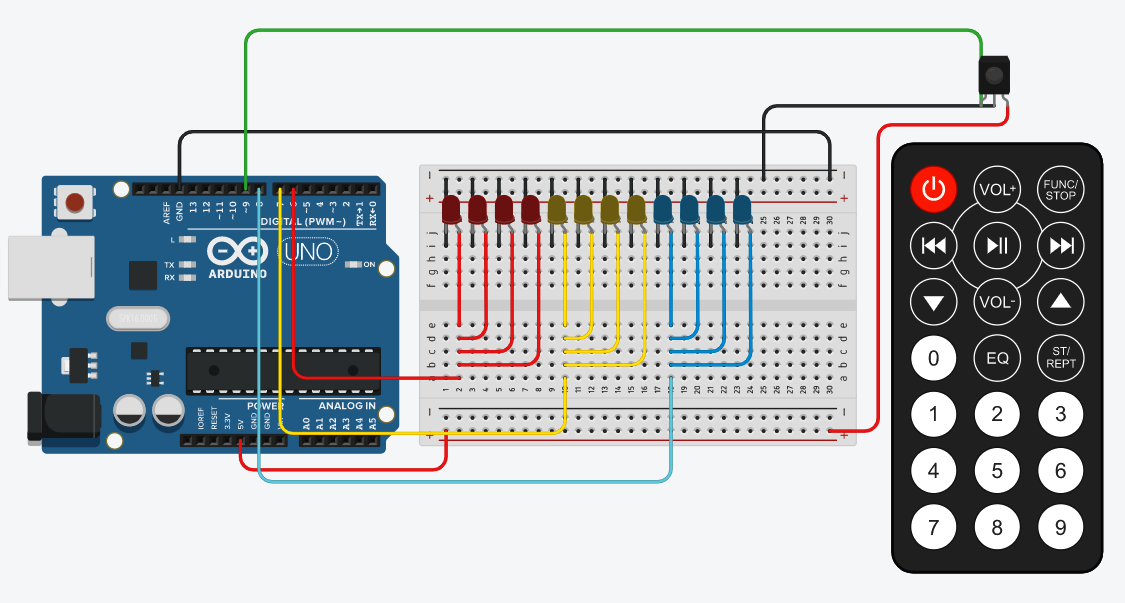
Connection of TSOP1738
- Connect the First pin from the left of TSOP1738 (OUT pin) with pin 9 of Arduino.
- Hook the Middle pin (GND pin) with the GND pin of Arduino.
- Connect the third and the last pin (VCC pin)with 5V pin of Arduino.
Connection of LED's
- Connect the all 4 Red LED (Anode pin/5v) with pin 6ofArduino
- Connect the all 4 Yellow LED (Anode pin/5v) with pin 7ofArduino
- Connect the all 4 Blue LED (Anode pin/5v) with pin 8ofArduino
- Connect the all LED (Cathodepin/GND) with pin GNDofArduino
Remember to install the IRremote.h library from Here
- Copy or download the code attached with the project.
- Hit upload and look into Serial Monitor.
- Take any remote you want to use or you want the codes off it and press any button.
- Now, see in the Serial Monitor. You will see a code of the corresponding button you pressed.
- You can also assign function to Glow LED Remote.
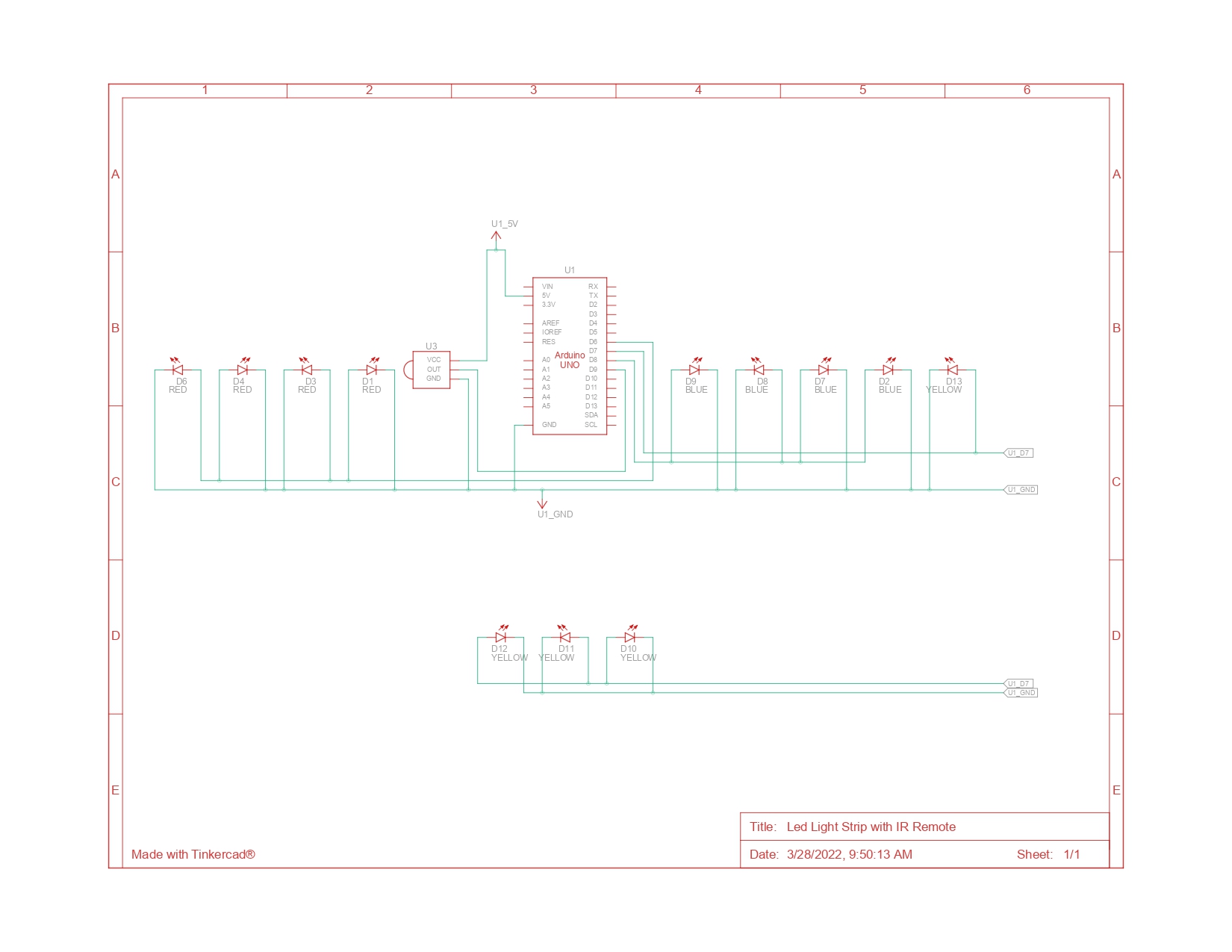
Circuit Diagram
Connect the First pin from the left of TSOP1738 (OUT pin) with pin 9 of Arduino.
Hook the Middle pin (GND pin) with the GND pin of Arduino.
Connect the third and the last pin (VCC pin)with 5V pin of Arduino.
Connection of LED's
Connect the all 4 Red LED (Anode pin/ 5v) with pin 6 of Arduino
Connect the all 4 Yellow LED (Anode pin/ 5v) with pin 7 of Arduino
Connect the all 4 Blue LED (Anode pin/ 5v) with pin 8 of Arduino
Connect the all LED (Cathode pin/ GND) with pin GND of Arduino



{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.