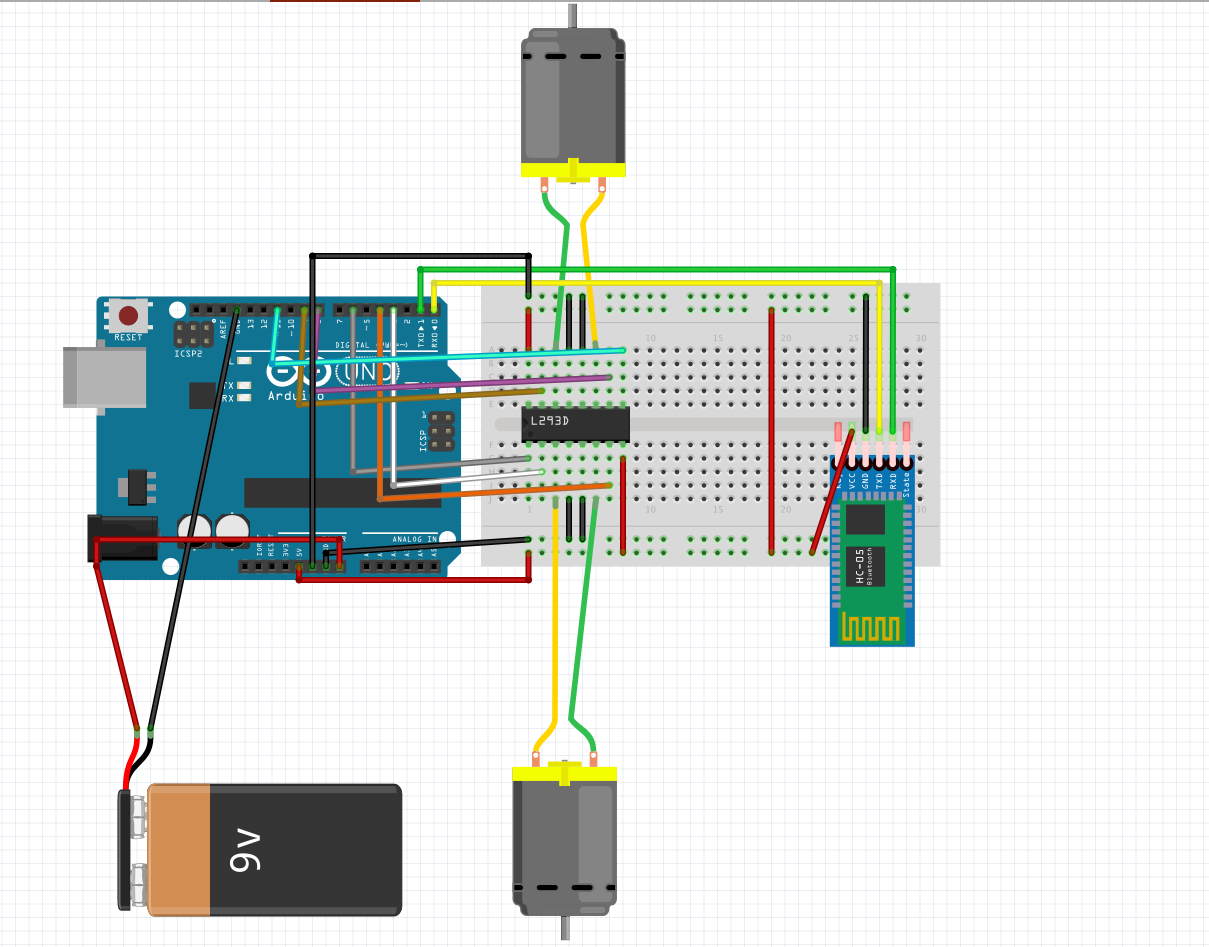
int motor1Pin1 = 3; // pin 2 on L293D IC
int motor1Pin2 = 4; // pin 7 on L293D IC
int enable1Pin = 6; // pin 1 on L293D IC
int motor2Pin1 = 8; // pin 10 on L293D IC
int motor2Pin2 = 9; // pin 15 on L293D IC
int enable2Pin = 11; // pin 9 on L293D IC
int state;
int flag=0; //makes sure that the serial only prints once the state
int stateStop=0;
void setup() {
// sets the pins as outputs:
pinMode(motor1Pin1, OUTPUT);
pinMode(motor1Pin2, OUTPUT);
pinMode(enable1Pin, OUTPUT);
pinMode(motor2Pin1, OUTPUT);
pinMode(motor2Pin2, OUTPUT);
pinMode(enable2Pin, OUTPUT);
// sets enable1Pin and enable2Pin high so that motor can turn on:
digitalWrite(enable1Pin, HIGH);
digitalWrite(enable2Pin, HIGH);
// initialize serial communication at 9600 bits per second:
Serial.begin(9600);
}
void loop() {
//if some date is sent, reads it and saves in state
if(Serial.available() > 0){
state = Serial.read();
flag=0;
}
// if the state is '1' the DC motor will go forward
if (state == '1') {
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, HIGH);
if(flag == 0){
Serial.println("Go Forward!");
flag=1;
}
}
// if the state is '2' the motor will turn left
else if (state == '2') {
digitalWrite(motor1Pin1, HIGH);
digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, LOW);
if(flag == 0){
Serial.println("Turn LEFT");
flag=1;
}
delay(1500);
state=3;
stateStop=1;
}
// if the state is '3' the motor will Stop
else if (state == '3' || stateStop == 1) {
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, LOW);
if(flag == 0){
Serial.println("STOP!");
flag=1;
}
stateStop=0;
}
// if the state is '4' the motor will turn right
else if (state == '4') {
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, LOW);
digitalWrite(motor2Pin1, LOW);
digitalWrite(motor2Pin2, HIGH);
if(flag == 0){
Serial.println("Turn RIGHT");
flag=1;
}
delay(1500);
state=3;
stateStop=1;
}
// if the state is '5' the motor will Reverse
else if (state == '5') {
digitalWrite(motor1Pin1, LOW);
digitalWrite(motor1Pin2, HIGH);
digitalWrite(motor2Pin1, HIGH);
digitalWrite(motor2Pin2, LOW);
if(flag == 0){
Serial.println("Reverse!");
flag=1;
}
}
//For debugging purpose
//Serial.println(state);
}




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)








{kind=link}
Comments
Please log in or sign up to comment.