

Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
The project is designed to frighten people, and its use is not recommended for people sensitive or with health problems. If you want to do it, take your precautions.
The ideaThe idea came about because I have a younger sister whom I want to scare for simple reasons: she is my sister!
So I should have thought of several innovative and real ways.
First stepsIt was the first time I acceded to circuit.io and the first impressions were very good, it looked simple and intuitive.
The bad part was that there were not so many components, but for my project it was enough.
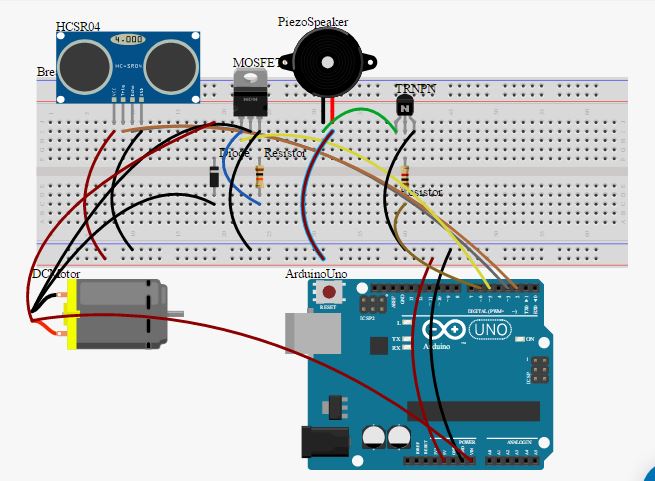
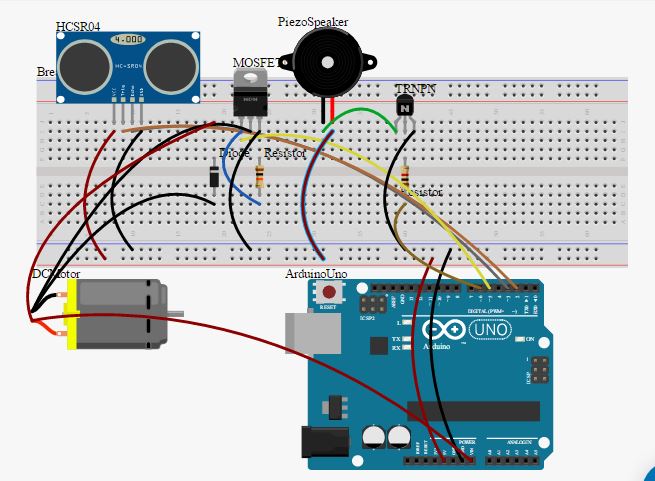
After putting all the components, the project is created and in another screen they appear the BOM, the Wire and the Code. This way it facilitates many things and also tells you how to implement the project. Below is the code created for my project.
The device has an ultrasonic sensor that detects the presence of the person. After detecting a person in the distance range, the next thing he does is to move the motor 180 degrees and then turn on the alarm to take care of the victim and give him a good scare.
My circuit.io link:https://storage.circuito.io/index.html?solutionId=58eee3f49314cd00121839f3
ResultsThe objectives were achieved and we could make a good prank!!!!!
GOOOD APRIL FOOOLS DAY!!!
// Include Libraries
#include "Arduino.h"
#include "DCMotor.h"
#include "NewPing.h"
#include "PiezoSpeaker.h"
// Pin Definitions
#define DCMOTOR_PIN_COIL1 3
#define HCSR04_PIN_TRIG 9
#define HCSR04_PIN_ECHO 8
#define PIEZOSPEAKER_PIN_SIG 2
// Global variables and defines
unsigned int piezoSpeakerHoorayLength = 6; // amount of notes in melody
unsigned int piezoSpeakerHoorayMelody[] = {NOTE_C4, NOTE_E4, NOTE_G4, NOTE_C5, NOTE_G4, NOTE_C5}; // list of notes. List length must match HoorayLength!
unsigned int piezoSpeakerHoorayNoteDurations[] = {8 , 8 , 8 , 4 , 8 , 4 }; // note durations; 4 = quarter note, 8 = eighth note, etc. List length must match HoorayLength!
// Constructors
DCMotor dcMotor(DCMOTOR_PIN_COIL1);
NewPing hcsr04(HCSR04_PIN_TRIG,HCSR04_PIN_ECHO);
PiezoSpeaker piezoSpeaker(PIEZOSPEAKER_PIN_SIG);
// define vars for testing menu
#define TIMEOUT 10000 //define timeout of 10 sec
char menuOption = 0;
long time0;
/* This code sets up the essentials for your circuit to work. It runs first every time your circuit is powered with electricity. */
void setup() {
// Setup Serial which is useful for debugging
// Use the Serial Monitor to view printed messages
Serial.begin(9600);
while (!Serial) ; // wait for serial port to connect. Needed for native USB
Serial.println("start");
}
/* This code is the main logic of your circuit. It defines the interaction between the components you selected. After setup, it runs over and over again, in an eternal loop. */
void loop() {
int hcsr04Dist = hcsr04.ping_cm();
if(hcsr04Dist<=40){
dcMotor.on(); // 1. turns on
delay(810); // 2. waits 4000 milliseconds (4 sec). change the value in the brackets (4000) for a longer or shorter delay.
dcMotor.off(); // 3. turns off
piezoSpeaker.playMelody(piezoSpeakerHoorayLength, piezoSpeakerHoorayMelody, piezoSpeakerHoorayNoteDurations);
delay(6250); // 4. waits 4000 milliseconds (4 sec). change the value in the brackets (4000) for a longer or shorter delay.
}
}
/*******************************************************
* Circuito.io is an automatic generator of schematics and code for off
* the shelf hardware combinations.
* Copyright (C) 2016 Roboplan Technologies Ltd.
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
* You should have received a copy of the GNU General Public License
* along with this program. If not, see <http://www.gnu.org/licenses/>.
* In addition, and without limitation, to the disclaimers of warranties
* stated above and in the GNU General Public License version 3 (or any
* later version), Roboplan Technologies Ltd. ("Roboplan") offers this
* program subject to the following warranty disclaimers and by using
* this program you acknowledge and agree to the following:
* THIS PROGRAM IS PROVIDED ON AN "AS IS" AND "AS AVAILABLE" BASIS, AND
* WITHOUT WARRANTIES OF ANY KIND EITHER EXPRESS OR IMPLIED. ROBOPLAN
* HEREBY DISCLAIMS ALL WARRANTIES, EXPRESS OR IMPLIED, INCLUDING BUT
* NOT LIMITED TO IMPLIED WARRANTIES OF MERCHANTABILITY, TITLE, FITNESS
* FOR A PARTICULAR PURPOSE, NON-INFRINGEMENT, AND THOSE ARISING BY
* STATUTE OR FROM A COURSE OF DEALING OR USAGE OF TRADE.
* YOUR RELIANCE ON, OR USE OF THIS PROGRAM IS AT YOUR SOLE RISK.
* ROBOPLAN DOES NOT GUARANTEE THAT THE PROGRAM WILL BE FREE OF, OR NOT
* SUSCEPTIBLE TO, BUGS, SECURITY BREACHES, OR VIRUSES. ROBOPLAN DOES
* NOT WARRANT THAT YOUR USE OF THE PROGRAM, INCLUDING PURSUANT TO
* SCHEMATICS, INSTRUCTIONS OR RECOMMENDATIONS OF ROBOPLAN, WILL BE SAFE
* FOR PERSONAL USE OR FOR PRODUCTION OR COMMERCIAL USE, WILL NOT
* VIOLATE ANY THIRD PARTY RIGHTS, WILL PROVIDE THE INTENDED OR DESIRED
* RESULTS, OR OPERATE AS YOU INTENDED OR AS MAY BE INDICATED BY ROBOPLAN.
* YOU HEREBY WAIVE, AGREE NOT TO ASSERT AGAINST, AND RELEASE ROBOPLAN,
* ITS LICENSORS AND AFFILIATES FROM, ANY CLAIMS IN CONNECTION WITH ANY OF
* THE ABOVE.
********************************************************/
/** \addtogroup DCMotor
* @{
*/
#ifndef _DC_MOTOR_H_
#define _DC_MOTOR_H_
const int DEFAULT_SPEED = 200; //out of 255
//DcMotor driver class:
class DCMotor {
public:
DCMotor(const int pin);
void on(int speed = 250);
void off();
void setSpeed(int speed);
private:
const int m_pin;
int m_speed;
bool m_state;
};
#endif // _DC_MOTOR_H_
/** @}*/
#include <Arduino.h>
#include "DCMotor.h"
/**
* Construct a DC Motor instance
*/
DCMotor::DCMotor(const int pin) : m_pin(pin)
{
pinMode(m_pin, OUTPUT); // sets the digital pin as output
off(); // default state is off
m_speed = DEFAULT_SPEED; // set default speed on load
}
/**
* Turn on DC Motor
* speed - is a PWM value 0-255 determaining the motor speed
*/
void DCMotor::on(int speed)
{
m_speed = speed;
analogWrite(m_pin, m_speed);
m_state = true;
}
/**
* Turn off DC Motor
*/
void DCMotor::off()
{
digitalWrite(m_pin, 0);
m_state = false;
}
/**
* Update DC Motor speed. Can use on() as well
* speed - is a PWM value 0-255 determaining the motor speed
*/
void DCMotor::setSpeed(int speed)
{
m_speed = speed;
// If already running, update pin
if (m_state)
{
analogWrite(m_pin, m_speed);
}
}
// ---------------------------------------------------------------------------
// Created by Tim Eckel - teckel@leethost.com
// Copyright 2016 License: GNU GPL v3 http://www.gnu.org/licenses/gpl.html
//
// See "NewPing.h" for purpose, syntax, version history, links, and more.
// ---------------------------------------------------------------------------
#include "NewPing.h"
/**
* NewPing constructor.<BR>
* trigger_pin - arduino pin connected to TRIG port on sensor.<BR>
* echo_pin - arduino pin connected to ECHO port on sensor.<BR>
* max_cm_distance - (optional) by defult = 500. define max value to be returned
*/
NewPing::NewPing(uint8_t trigger_pin, uint8_t echo_pin, unsigned int max_cm_distance) {
#if DO_BITWISE == true
_triggerBit = digitalPinToBitMask(trigger_pin); // Get the port register bitmask for the trigger pin.
_echoBit = digitalPinToBitMask(echo_pin); // Get the port register bitmask for the echo pin.
_triggerOutput = portOutputRegister(digitalPinToPort(trigger_pin)); // Get the output port register for the trigger pin.
_echoInput = portInputRegister(digitalPinToPort(echo_pin)); // Get the input port register for the echo pin.
_triggerMode = (uint8_t *) portModeRegister(digitalPinToPort(trigger_pin)); // Get the port mode register for the trigger pin.
#else
_triggerPin = trigger_pin;
_echoPin = echo_pin;
#endif
set_max_distance(max_cm_distance); // Call function to set the max sensor distance.
#if (defined (__arm__) && defined (TEENSYDUINO)) || DO_BITWISE != true
pinMode(echo_pin, INPUT); // Set echo pin to input (on Teensy 3.x (ARM), pins default to disabled, at least one pinMode() is needed for GPIO mode).
pinMode(trigger_pin, OUTPUT); // Set trigger pin to output (on Teensy 3.x (ARM), pins default to disabled, at least one pinMode() is needed for GPIO mode).
#endif
#if defined (ARDUINO_AVR_YUN)
pinMode(echo_pin, INPUT); // Set echo pin to input for the Arduino Yun, not sure why it doesn't default this way.
#endif
#if ONE_PIN_ENABLED != true && DO_BITWISE == true
*_triggerMode |= _triggerBit; // Set trigger pin to output.
#endif
}
/**
* Standard ping methods.<BR>
* Return time of flight
* max_cm_distance - (optional) by defult = 500. define max value to be returned
*/
unsigned int NewPing::ping(unsigned int max_cm_distance) {
if (max_cm_distance > 0) set_max_distance(max_cm_distance); // Call function to set a new max sensor distance.
if (!ping_trigger()) return NO_ECHO; // Trigger a ping, if it returns false, return NO_ECHO to the calling function.
#if URM37_ENABLED == true
#if DO_BITWISE == true
while (!(*_echoInput & _echoBit)) // Wait for the ping echo.
#else
while (!digitalRead(_echoPin)) // Wait for the ping echo.
#endif
if (micros() > _max_time) return NO_ECHO; // Stop the loop and return NO_ECHO (false) if we're beyond the set maximum distance.
#else
#if DO_BITWISE == true
while (*_echoInput & _echoBit) // Wait for the ping echo.
#else
while (digitalRead(_echoPin)) // Wait for the ping echo.
#endif
if (micros() > _max_time) return NO_ECHO; // Stop the loop and return NO_ECHO (false) if we're beyond the set maximum distance.
#endif
return (micros() - (_max_time - _maxEchoTime) - PING_OVERHEAD); // Calculate ping time, include overhead.
}
/*
* Read distance from sensor.<BR>
* Return distance in cm
*/
unsigned long NewPing::ping_cm(unsigned int max_cm_distance) {
unsigned long echoTime = NewPing::ping(max_cm_distance); // Calls the ping method and returns with the ping echo distance in uS.
#if ROUNDING_ENABLED == false
return (echoTime / US_ROUNDTRIP_CM); // Call the ping method and returns the distance in centimeters (no rounding).
#else
return NewPingConvert(echoTime, US_ROUNDTRIP_CM); // Convert uS to centimeters.
#endif
}
/*
* Read distance from sensor.<BR>
* Return distance in inch
*/
unsigned long NewPing::ping_in(unsigned int max_cm_distance) {
unsigned long echoTime = NewPing::ping(max_cm_distance); // Calls the ping method and returns with the ping echo distance in uS.
#if ROUNDING_ENABLED == false
return (echoTime / US_ROUNDTRIP_IN); // Call the ping method and returns the distance in inches (no rounding).
#else
return NewPingConvert(echoTime, US_ROUNDTRIP_IN); // Convert uS to inches.
#endif
}
unsigned long NewPing::ping_median(uint8_t it, unsigned int max_cm_distance) {
unsigned int uS[it], last;
uint8_t j, i = 0;
unsigned long t;
uS[0] = NO_ECHO;
while (i < it) {
t = micros(); // Start ping timestamp.
last = ping(max_cm_distance); // Send ping.
if (last != NO_ECHO) { // Ping in range, include as part of median.
if (i > 0) { // Don't start sort till second ping.
for (j = i; j > 0 && uS[j - 1] < last; j--) // Insertion sort loop.
uS[j] = uS[j - 1]; // Shift ping array to correct position for sort insertion.
} else j = 0; // First ping is sort starting point.
uS[j] = last; // Add last ping to array in sorted position.
i++; // Move to next ping.
} else it--; // Ping out of range, skip and don't include as part of median.
if (i < it && micros() - t < PING_MEDIAN_DELAY)
delay((PING_MEDIAN_DELAY + t - micros()) / 1000); // Millisecond delay between pings.
}
return (uS[it >> 1]); // Return the ping distance median.
}
/**
* Standard and timer interrupt ping method support functions (not called directly)
*/
boolean NewPing::ping_trigger() {
#if DO_BITWISE == true
#if ONE_PIN_ENABLED == true
*_triggerMode |= _triggerBit; // Set trigger pin to output.
#endif
*_triggerOutput &= ~_triggerBit; // Set the trigger pin low, should already be low, but this will make sure it is.
delayMicroseconds(4); // Wait for pin to go low.
*_triggerOutput |= _triggerBit; // Set trigger pin high, this tells the sensor to send out a ping.
delayMicroseconds(10); // Wait long enough for the sensor to realize the trigger pin is high. Sensor specs say to wait 10uS.
*_triggerOutput &= ~_triggerBit; // Set trigger pin back to low.
#if ONE_PIN_ENABLED == true
*_triggerMode &= ~_triggerBit; // Set trigger pin to input (when using one Arduino pin, this is technically setting the echo pin to input as both are tied to the same Arduino pin).
#endif
#if URM37_ENABLED == true
if (!(*_echoInput & _echoBit)) return false; // Previous ping hasn't finished, abort.
_max_time = micros() + _maxEchoTime + MAX_SENSOR_DELAY; // Maximum time we'll wait for ping to start (most sensors are <450uS, the SRF06 can take up to 34,300uS!)
while (*_echoInput & _echoBit) // Wait for ping to start.
if (micros() > _max_time) return false; // Took too long to start, abort.
#else
if (*_echoInput & _echoBit) return false; // Previous ping hasn't finished, abort.
_max_time = micros() + _maxEchoTime + MAX_SENSOR_DELAY; // Maximum time we'll wait for ping to start (most sensors are <450uS, the SRF06 can take up to 34,300uS!)
while (!(*_echoInput & _echoBit)) // Wait for ping to start.
if (micros() > _max_time) return false; // Took too long to start, abort.
#endif
#else
#if ONE_PIN_ENABLED == true
pinMode(_triggerPin, OUTPUT); // Set trigger pin to output.
#endif
digitalWrite(_triggerPin, LOW); // Set the trigger pin low, should already be low, but this will make sure it is.
delayMicroseconds(4); // Wait for pin to go low.
digitalWrite(_triggerPin, HIGH); // Set trigger pin high, this tells the sensor to send out a ping.
delayMicroseconds(10); // Wait long enough for the sensor to realize the trigger pin is high. Sensor specs say to wait 10uS.
digitalWrite(_triggerPin, LOW); // Set trigger pin back to low.
#if ONE_PIN_ENABLED == true
pinMode(_triggerPin, INPUT); // Set trigger pin to input (when using one Arduino pin, this is technically setting the echo pin to input as both are tied to the same Arduino pin).
#endif
#if URM37_ENABLED == true
if (!digitalRead(_echoPin)) return false; // Previous ping hasn't finished, abort.
_max_time = micros() + _maxEchoTime + MAX_SENSOR_DELAY; // Maximum time we'll wait for ping to start (most sensors are <450uS, the SRF06 can take up to 34,300uS!)
while (digitalRead(_echoPin)) // Wait for ping to start.
if (micros() > _max_time) return false; // Took too long to start, abort.
#else
if (digitalRead(_echoPin)) return false; // Previous ping hasn't finished, abort.
_max_time = micros() + _maxEchoTime + MAX_SENSOR_DELAY; // Maximum time we'll wait for ping to start (most sensors are <450uS, the SRF06 can take up to 34,300uS!)
while (!digitalRead(_echoPin)) // Wait for ping to start.
if (micros() > _max_time) return false; // Took too long to start, abort.
#endif
#endif
_max_time = micros() + _maxEchoTime; // Ping started, set the time-out.
return true; // Ping started successfully.
}
void NewPing::set_max_distance(unsigned int max_cm_distance) {
#if ROUNDING_ENABLED == false
_maxEchoTime = min(max_cm_distance + 1, (unsigned int) MAX_SENSOR_DISTANCE + 1) * US_ROUNDTRIP_CM; // Calculate the maximum distance in uS (no rounding).
#else
_maxEchoTime = min(max_cm_distance, (unsigned int) MAX_SENSOR_DISTANCE) * US_ROUNDTRIP_CM + (US_ROUNDTRIP_CM / 2); // Calculate the maximum distance in uS.
#endif
}
#if TIMER_ENABLED == true && DO_BITWISE == true
/*
* Timer interrupt ping methods (won't work with non-AVR, ATmega128 and all ATtiny microcontrollers)
*/
void NewPing::ping_timer(void (*userFunc)(void), unsigned int max_cm_distance) {
if (max_cm_distance > 0) set_max_distance(max_cm_distance); // Call function to set a new max sensor distance.
if (!ping_trigger()) return; // Trigger a ping, if it returns false, return without starting the echo timer.
timer_us(ECHO_TIMER_FREQ, userFunc); // Set ping echo timer check every ECHO_TIMER_FREQ uS.
}
boolean NewPing::check_timer() {
if (micros() > _max_time) { // Outside the time-out limit.
timer_stop(); // Disable timer interrupt
return false; // Cancel ping timer.
}
#if URM37_ENABLED == false
if (!(*_echoInput & _echoBit)) { // Ping echo received.
#else
if (*_echoInput & _echoBit) { // Ping echo received.
#endif
timer_stop(); // Disable timer interrupt
ping_result = (micros() - (_max_time - _maxEchoTime) - PING_TIMER_OVERHEAD); // Calculate ping time including overhead.
return true; // Return ping echo true.
}
return false; // Return false because there's no ping echo yet.
}
/*
* Timer2/Timer4 interrupt methods (can be used for non-ultrasonic needs)
*/
// Variables used for timer functions
void (*intFunc)();
void (*intFunc2)();
unsigned long _ms_cnt_reset;
volatile unsigned long _ms_cnt;
#if defined(__arm__) && defined(TEENSYDUINO)
IntervalTimer itimer;
#endif
void NewPing::timer_us(unsigned int frequency, void (*userFunc)(void)) {
intFunc = userFunc; // User's function to call when there's a timer event.
timer_setup(); // Configure the timer interrupt.
#if defined (__AVR_ATmega32U4__) // Use Timer4 for ATmega32U4 (Teensy/Leonardo).
OCR4C = min((frequency>>2) - 1, 255); // Every count is 4uS, so divide by 4 (bitwise shift right 2) subtract one, then make sure we don't go over 255 limit.
TIMSK4 = (1<<TOIE4); // Enable Timer4 interrupt.
#elif defined (__arm__) && defined (TEENSYDUINO) // Timer for Teensy 3.x
itimer.begin(userFunc, frequency); // Really simple on the Teensy 3.x, calls userFunc every 'frequency' uS.
#else
OCR2A = min((frequency>>2) - 1, 255); // Every count is 4uS, so divide by 4 (bitwise shift right 2) subtract one, then make sure we don't go over 255 limit.
TIMSK2 |= (1<<OCIE2A); // Enable Timer2 interrupt.
#endif
}
void NewPing::timer_ms(unsigned long frequency, void (*userFunc)(void)) {
intFunc = NewPing::timer_ms_cntdwn; // Timer events are sent here once every ms till user's frequency is reached.
intFunc2 = userFunc; // User's function to call when user's frequency is reached.
_ms_cnt = _ms_cnt_reset = frequency; // Current ms counter and reset value.
timer_setup(); // Configure the timer interrupt.
#if defined (__AVR_ATmega32U4__) // Use Timer4 for ATmega32U4 (Teensy/Leonardo).
OCR4C = 249; // Every count is 4uS, so 1ms = 250 counts - 1.
TIMSK4 = (1<<TOIE4); // Enable Timer4 interrupt.
#elif defined (__arm__) && defined (TEENSYDUINO) // Timer for Teensy 3.x
itimer.begin(NewPing::timer_ms_cntdwn, 1000); // Set timer to 1ms (1000 uS).
#else
OCR2A = 249; // Every count is 4uS, so 1ms = 250 counts - 1.
TIMSK2 |= (1<<OCIE2A); // Enable Timer2 interrupt.
#endif
}
void NewPing::timer_stop() { // Disable timer interrupt.
#if defined (__AVR_ATmega32U4__) // Use Timer4 for ATmega32U4 (Teensy/Leonardo).
TIMSK4 = 0;
#elif defined (__arm__) && defined (TEENSYDUINO) // Timer for Teensy 3.x
itimer.end();
#else
TIMSK2 &= ~(1<<OCIE2A);
#endif
}
/*
* Timer2/Timer4 interrupt method support functions (not called directly)
*/
void NewPing::timer_setup() {
#if defined (__AVR_ATmega32U4__) // Use Timer4 for ATmega32U4 (Teensy/Leonardo).
timer_stop(); // Disable Timer4 interrupt.
TCCR4A = TCCR4C = TCCR4D = TCCR4E = 0;
TCCR4B = (1<<CS42) | (1<<CS41) | (1<<CS40) | (1<<PSR4); // Set Timer4 prescaler to 64 (4uS/count, 4uS-1020uS range).
TIFR4 = (1<<TOV4);
TCNT4 = 0; // Reset Timer4 counter.
#elif defined (__AVR_ATmega8__) || defined (__AVR_ATmega16__) || defined (__AVR_ATmega32__) || defined (__AVR_ATmega8535__) // Alternate timer commands for certain microcontrollers.
timer_stop(); // Disable Timer2 interrupt.
ASSR &= ~(1<<AS2); // Set clock, not pin.
TCCR2 = (1<<WGM21 | 1<<CS22); // Set Timer2 to CTC mode, prescaler to 64 (4uS/count, 4uS-1020uS range).
TCNT2 = 0; // Reset Timer2 counter.
#elif defined (__arm__) && defined (TEENSYDUINO)
timer_stop(); // Stop the timer.
#else
timer_stop(); // Disable Timer2 interrupt.
ASSR &= ~(1<<AS2); // Set clock, not pin.
TCCR2A = (1<<WGM21); // Set Timer2 to CTC mode.
TCCR2B = (1<<CS22); // Set Timer2 prescaler to 64 (4uS/count, 4uS-1020uS range).
TCNT2 = 0; // Reset Timer2 counter.
#endif
}
void NewPing::timer_ms_cntdwn() {
if (!_ms_cnt--) { // Count down till we reach zero.
intFunc2(); // Scheduled time reached, run the main timer event function.
_ms_cnt = _ms_cnt_reset; // Reset the ms timer.
}
}
/*
#if defined (__AVR_ATmega32U4__) // Use Timer4 for ATmega32U4 (Teensy/Leonardo).
ISR(TIMER4_OVF_vect) {
intFunc(); // Call wrapped function.
}
#elif defined (__AVR_ATmega8__) || defined (__AVR_ATmega16__) || defined (__AVR_ATmega32__) || defined (__AVR_ATmega8535__) // Alternate timer commands for certain microcontrollers.
ISR(TIMER2_COMP_vect) {
intFunc(); // Call wrapped function.
}
#elif defined (__arm__)
// Do nothing...
#else
ISR(TIMER2_COMPA_vect) {
intFunc(); // Call wrapped function.
}
#endif
*/
#endif
// ---------------------------------------------------------------------------
// Conversion methods (rounds result to nearest cm or inch).
// ---------------------------------------------------------------------------
/**
* Return Distance in cm
*/
unsigned int NewPing::convert_cm(unsigned int echoTime) {
#if ROUNDING_ENABLED == false
return (echoTime / US_ROUNDTRIP_CM); // Convert uS to centimeters (no rounding).
#else
return NewPingConvert(echoTime, US_ROUNDTRIP_CM); // Convert uS to centimeters.
#endif
}
/**
* Return Distance in Inched
*/
unsigned int NewPing::convert_in(unsigned int echoTime) {
#if ROUNDING_ENABLED == false
return (echoTime / US_ROUNDTRIP_IN); // Convert uS to inches (no rounding).
#else
return NewPingConvert(echoTime, US_ROUNDTRIP_IN); // Convert uS to inches.
#endif
}
// ---------------------------------------------------------------------------
// NewPing Library - v1.8 - 07/30/2016
//
// AUTHOR/LICENSE:
// Created by Tim Eckel - teckel@leethost.com
// Copyright 2016 License: GNU GPL v3 http://www.gnu.org/licenses/gpl.html
//
// LINKS:
// Project home: https://bitbucket.org/teckel12/arduino-new-ping/wiki/Home
// Blog: http://arduino.cc/forum/index.php/topic,106043.0.html
//
// DISCLAIMER:
// This software is furnished "as is", without technical support, and with no
// warranty, express or implied, as to its usefulness for any purpose.
//
// BACKGROUND:
// When I first received an ultrasonic sensor I was not happy with how poorly
// it worked. Quickly I realized the problem wasn't the sensor, it was the
// available ping and ultrasonic libraries causing the problem. The NewPing
// library totally fixes these problems, adds many new features, and breaths
// new life into these very affordable distance sensors.
//
// FEATURES:
// * Works with many different ultrasonic sensors: SR04, SRF05, SRF06, DYP-ME007, URM37 & Parallax PING))).
// * Compatible with the entire Arduino line-up (and clones), Teensy family (including $19 96Mhz 32 bit Teensy 3.2) and non-AVR microcontrollers.
// * Interface with all but the SRF06 sensor using only one Arduino pin.
// * Doesn't lag for a full second if no ping/echo is received.
// * Ping sensors consistently and reliably at up to 30 times per second.
// * Timer interrupt method for event-driven sketches.
// * Built-in digital filter method ping_median() for easy error correction.
// * Uses port registers for a faster pin interface and smaller code size.
// * Allows you to set a maximum distance where pings beyond that distance are read as no ping "clear".
// * Ease of using multiple sensors (example sketch with 15 sensors).
// * More accurate distance calculation (cm, inches & uS).
// * Doesn't use pulseIn, which is slow and gives incorrect results with some ultrasonic sensor models.
// * Actively developed with features being added and bugs/issues addressed.
//
// CONSTRUCTOR:
// NewPing sonar(trigger_pin, echo_pin [, max_cm_distance])
// trigger_pin & echo_pin - Arduino pins connected to sensor trigger and echo.
// NOTE: To use the same Arduino pin for trigger and echo, specify the same pin for both values.
// max_cm_distance - [Optional] Maximum distance you wish to sense. Default=500cm.
//
// METHODS:
// sonar.ping([max_cm_distance]) - Send a ping and get the echo time (in microseconds) as a result. [max_cm_distance] allows you to optionally set a new max distance.
// sonar.ping_in([max_cm_distance]) - Send a ping and get the distance in whole inches. [max_cm_distance] allows you to optionally set a new max distance.
// sonar.ping_cm([max_cm_distance]) - Send a ping and get the distance in whole centimeters. [max_cm_distance] allows you to optionally set a new max distance.
// sonar.ping_median(iterations [, max_cm_distance]) - Do multiple pings (default=5), discard out of range pings and return median in microseconds. [max_cm_distance] allows you to optionally set a new max distance.
// NewPing::convert_in(echoTime) - Convert echoTime from microseconds to inches (rounds to nearest inch).
// NewPing::convert_cm(echoTime) - Convert echoTime from microseconds to centimeters (rounds to nearest cm).
// sonar.ping_timer(function [, max_cm_distance]) - Send a ping and call function to test if ping is complete. [max_cm_distance] allows you to optionally set a new max distance.
// sonar.check_timer() - Check if ping has returned within the set distance limit.
// NewPing::timer_us(frequency, function) - Call function every frequency microseconds.
// NewPing::timer_ms(frequency, function) - Call function every frequency milliseconds.
// NewPing::timer_stop() - Stop the timer.
//
// HISTORY:
// 07/30/2016 v1.8 - Added support for non-AVR microcontrollers. For non-AVR
// microcontrollers, advanced ping_timer() timer methods are disabled due to
// inconsistencies or no support at all between platforms. However, standard
// ping methods are all supported. Added new optional variable to ping(),
// ping_in(), ping_cm(), ping_median(), and ping_timer() methods which allows
// you to set a new maximum distance for each ping. Added support for the
// ATmega16, ATmega32 and ATmega8535 microcontrollers. Changed convert_cm()
// and convert_in() methods to static members. You can now call them without
// an object. For example: cm = NewPing::convert_cm(distance);
//
// 09/29/2015 v1.7 - Removed support for the Arduino Due and Zero because
// they're both 3.3 volt boards and are not 5 volt tolerant while the HC-SR04
// is a 5 volt sensor. Also, the Due and Zero don't support pin manipulation
// compatibility via port registers which can be done (see the Teensy 3.2).
//
// 06/17/2014 v1.6 - Corrected delay between pings when using ping_median()
// method. Added support for the URM37 sensor (must change URM37_ENABLED from
// false to true). Added support for Arduino microcontrollers like the $20
// 32 bit ARM Cortex-M4 based Teensy 3.2. Added automatic support for the
// Atmel ATtiny family of microcontrollers. Added timer support for the
// ATmega8 microcontroller. Rounding disabled by default, reduces compiled
// code size (can be turned on with ROUNDING_ENABLED switch). Added
// TIMER_ENABLED switch to get around compile-time "__vector_7" errors when
// using the Tone library, or you can use the toneAC, NewTone or
// TimerFreeTone libraries: https://bitbucket.org/teckel12/arduino-toneac/
// Other speed and compiled size optimizations.
//
// 08/15/2012 v1.5 - Added ping_median() method which does a user specified
// number of pings (default=5) and returns the median ping in microseconds
// (out of range pings ignored). This is a very effective digital filter.
// Optimized for smaller compiled size (even smaller than sketches that
// don't use a library).
//
// 07/14/2012 v1.4 - Added support for the Parallax PING))) sensor. Interface
// with all but the SRF06 sensor using only one Arduino pin. You can also
// interface with the SRF06 using one pin if you install a 0.1uf capacitor
// on the trigger and echo pins of the sensor then tie the trigger pin to
// the Arduino pin (doesn't work with Teensy). To use the same Arduino pin
// for trigger and echo, specify the same pin for both values. Various bug
// fixes.
//
// 06/08/2012 v1.3 - Big feature addition, event-driven ping! Uses Timer2
// interrupt, so be mindful of PWM or timing conflicts messing with Timer2
// may cause (namely PWM on pins 3 & 11 on Arduino, PWM on pins 9 and 10 on
// Mega, and Tone library). Simple to use timer interrupt functions you can
// use in your sketches totally unrelated to ultrasonic sensors (don't use if
// you're also using NewPing's ping_timer because both use Timer2 interrupts).
// Loop counting ping method deleted in favor of timing ping method after
// inconsistent results kept surfacing with the loop timing ping method.
// Conversion to cm and inches now rounds to the nearest cm or inch. Code
// optimized to save program space and fixed a couple minor bugs here and
// there. Many new comments added as well as line spacing to group code
// sections for better source readability.
//
// 05/25/2012 v1.2 - Lots of code clean-up thanks to Arduino Forum members.
// Rebuilt the ping timing code from scratch, ditched the pulseIn code as it
// doesn't give correct results (at least with ping sensors). The NewPing
// library is now VERY accurate and the code was simplified as a bonus.
// Smaller and faster code as well. Fixed some issues with very close ping
// results when converting to inches. All functions now return 0 only when
// there's no ping echo (out of range) and a positive value for a successful
// ping. This can effectively be used to detect if something is out of range
// or in-range and at what distance. Now compatible with Arduino 0023.
//
// 05/16/2012 v1.1 - Changed all I/O functions to use low-level port registers
// for ultra-fast and lean code (saves from 174 to 394 bytes). Tested on both
// the Arduino Uno and Teensy 2.0 but should work on all Arduino-based
// platforms because it calls standard functions to retrieve port registers
// and bit masks. Also made a couple minor fixes to defines.
//
// 05/15/2012 v1.0 - Initial release.
// ---------------------------------------------------------------------------
/** \addtogroup HCSR-04
* @{
*/
#ifndef NewPing_h
#define NewPing_h
#if defined (ARDUINO) && ARDUINO >= 100
#include <Arduino.h>
#else
#include <WProgram.h>
#include <pins_arduino.h>
#endif
#if defined (__AVR__)
#include <avr/io.h>
#include <avr/interrupt.h>
#endif
// Shouldn't need to change these values unless you have a specific need to do so.
#define MAX_SENSOR_DISTANCE 500 // Maximum sensor distance can be as high as 500cm, no reason to wait for ping longer than sound takes to travel this distance and back. Default=500
#define US_ROUNDTRIP_CM 57 // Microseconds (uS) it takes sound to travel round-trip 1cm (2cm total), uses integer to save compiled code space. Default=57
#define US_ROUNDTRIP_IN 146 // Microseconds (uS) it takes sound to travel round-trip 1 inch (2 inches total), uses integer to save compiled code space. Defalult=146
#define ONE_PIN_ENABLED true // Set to "false" to disable one pin mode which saves around 14-26 bytes of binary size. Default=true
#define ROUNDING_ENABLED false // Set to "true" to enable distance rounding which also adds 64 bytes to binary size. Default=false
#define URM37_ENABLED false // Set to "true" to enable support for the URM37 sensor in PWM mode. Default=false
#define TIMER_ENABLED true // Set to "false" to disable the timer ISR (if getting "__vector_7" compile errors set this to false). Default=true
// Probably shouldn't change these values unless you really know what you're doing.
#define NO_ECHO 0 // Value returned if there's no ping echo within the specified MAX_SENSOR_DISTANCE or max_cm_distance. Default=0
#define MAX_SENSOR_DELAY 5800 // Maximum uS it takes for sensor to start the ping. Default=5800
#define ECHO_TIMER_FREQ 24 // Frequency to check for a ping echo (every 24uS is about 0.4cm accuracy). Default=24
#define PING_MEDIAN_DELAY 29000 // Microsecond delay between pings in the ping_median method. Default=29000
#define PING_OVERHEAD 5 // Ping overhead in microseconds (uS). Default=5
#define PING_TIMER_OVERHEAD 13 // Ping timer overhead in microseconds (uS). Default=13
#if URM37_ENABLED == true
#undef US_ROUNDTRIP_CM
#undef US_ROUNDTRIP_IN
#define US_ROUNDTRIP_CM 50 // Every 50uS PWM signal is low indicates 1cm distance. Default=50
#define US_ROUNDTRIP_IN 127 // If 50uS is 1cm, 1 inch would be 127uS (50 x 2.54 = 127). Default=127
#endif
// Conversion from uS to distance (round result to nearest cm or inch).
#define NewPingConvert(echoTime, conversionFactor) (max(((unsigned int)echoTime + conversionFactor / 2) / conversionFactor, (echoTime ? 1 : 0)))
// Detect non-AVR microcontrollers (Teensy 3.x, Arduino DUE, etc.) and don't use port registers or timer interrupts as required.
#if (defined (__arm__) && defined (TEENSYDUINO))
#undef PING_OVERHEAD
#define PING_OVERHEAD 1
#undef PING_TIMER_OVERHEAD
#define PING_TIMER_OVERHEAD 1
#define DO_BITWISE true
#elif !defined (__AVR__)
#undef PING_OVERHEAD
#define PING_OVERHEAD 1
#undef PING_TIMER_OVERHEAD
#define PING_TIMER_OVERHEAD 1
#undef TIMER_ENABLED
#define TIMER_ENABLED false
#define DO_BITWISE false
#else
#define DO_BITWISE true
#endif
// Disable the timer interrupts when using ATmega128 and all ATtiny microcontrollers.
#if defined (__AVR_ATmega128__) || defined (__AVR_ATtiny24__) || defined (__AVR_ATtiny44__) || defined (__AVR_ATtiny84__) || defined (__AVR_ATtiny25__) || defined (__AVR_ATtiny45__) || defined (__AVR_ATtiny85__) || defined (__AVR_ATtiny261__) || defined (__AVR_ATtiny461__) || defined (__AVR_ATtiny861__) || defined (__AVR_ATtiny43U__)
#undef TIMER_ENABLED
#define TIMER_ENABLED false
#endif
// Define timers when using ATmega8, ATmega16, ATmega32 and ATmega8535 microcontrollers.
#if defined (__AVR_ATmega8__) || defined (__AVR_ATmega16__) || defined (__AVR_ATmega32__) || defined (__AVR_ATmega8535__)
#define OCR2A OCR2
#define TIMSK2 TIMSK
#define OCIE2A OCIE2
#endif
class NewPing {
public:
NewPing(uint8_t trigger_pin, uint8_t echo_pin, unsigned int max_cm_distance = MAX_SENSOR_DISTANCE);
unsigned int ping(unsigned int max_cm_distance = 0);
unsigned long ping_cm(unsigned int max_cm_distance = 0);
unsigned long ping_in(unsigned int max_cm_distance = 0);
unsigned long ping_median(uint8_t it = 5, unsigned int max_cm_distance = 0);
static unsigned int convert_cm(unsigned int echoTime);
static unsigned int convert_in(unsigned int echoTime);
#if TIMER_ENABLED == true
void ping_timer(void (*userFunc)(void), unsigned int max_cm_distance = 0);
boolean check_timer();
unsigned long ping_result;
static void timer_us(unsigned int frequency, void (*userFunc)(void));
static void timer_ms(unsigned long frequency, void (*userFunc)(void));
static void timer_stop();
#endif
private:
boolean ping_trigger();
void set_max_distance(unsigned int max_cm_distance);
#if TIMER_ENABLED == true
boolean ping_trigger_timer(unsigned int trigger_delay);
boolean ping_wait_timer();
static void timer_setup();
static void timer_ms_cntdwn();
#endif
#if DO_BITWISE == true
uint8_t _triggerBit;
uint8_t _echoBit;
volatile uint8_t *_triggerOutput;
volatile uint8_t *_echoInput;
volatile uint8_t *_triggerMode;
#else
uint8_t _triggerPin;
uint8_t _echoPin;
#endif
unsigned int _maxEchoTime;
unsigned long _max_time;
};
#endif
/** @}*/
#include "PiezoSpeaker.h"
PiezoSpeaker::PiezoSpeaker(int pin) : Speaker(pin){
}
#ifndef PiezoSpeaker_H
#define PiezoSpeaker_H
#include "Speaker.h"
class PiezoSpeaker : public Speaker {
public:
PiezoSpeaker(const int pin);
};
#endif //PiezoSpeaker_H
// ---------------------------------------------------------------------------
// Created by Tim Eckel - teckel@leethost.com
// Copyright 2016 License: GNU GPL v3 http://www.gnu.org/licenses/gpl-3.0.html
//
// See "TimerFreeTone.h" for purpose, syntax, version history, links, and more.
// ---------------------------------------------------------------------------
#include "TimerFreeTone.h"
uint8_t _tft_volume[] = { 255, 200, 150, 125, 100, 87, 50, 33, 22, 2 }; // Duty for linear volume control.
void TimerFreeTone(uint8_t pin, unsigned long frequency, unsigned int duration, uint8_t volume) {
if (frequency == 0 || volume == 0) { // If frequency or volume are zero, just wait duration and exit.
delay(duration);
return;
}
frequency = 1000000 / frequency; // Calculate the square wave length (in microseconds).
uint32_t duty = frequency / _tft_volume[min(volume, 10) - 1]; // Calculate the duty cycle (volume).
#ifdef __AVR__
uint8_t pinBit = digitalPinToBitMask(pin); // Get the bitmask for the pin.
volatile uint8_t *pinOutput = (uint8_t *) portOutputRegister(digitalPinToPort(pin)); // Get the port register for the pin.
volatile uint8_t *portMode = (uint8_t *) portModeRegister(digitalPinToPort(pin)); // Get the port mode register for the pin.
*portMode |= pinBit; // Set pin to output mode.
#else
pinMode(pin, OUTPUT); // Set pin to output mode.
#endif
uint32_t startTime = millis(); // Starting time of note.
while(millis() - startTime < duration) { // Loop for the duration.
#ifdef __AVR__
*pinOutput |= pinBit; // Set pin high.
delayMicroseconds(duty); // Square wave duration (how long to leave pin high).
*pinOutput &= ~pinBit; // Set pin low.
#else
digitalWrite(pin,HIGH); // Set pin high.
delayMicroseconds(duty); // Square wave duration (how long to leave pin high).
digitalWrite(pin,LOW); // Set pin low.
#endif
delayMicroseconds(frequency - duty); // Square wave duration (how long to leave pin low).
}
}
// ---------------------------------------------------------------------------
// TimerFreeTone Library - v1.5 - 09/12/2016
//
// AUTHOR/LICENSE:
// Created by Tim Eckel - teckel@leethost.com
// Copyright 2016 License: GNU GPL v3 http://www.gnu.org/licenses/gpl-3.0.html
//
// LINKS:
// Project home: https://bitbucket.org/teckel12/arduino-timer-free-tone
// Blog: http://forum.arduino.cc/index.php?topic=235774.0
//
// DISCLAIMER:
// This software is furnished "as is", without technical support, and with no
// warranty, express or implied, as to its usefulness for any purpose.
//
// PURPOSE:
// Doesn't use timers which frees up conflicts with other libraries. Compatible
// with all ATmega, ATtiny and ARM-based microcontrollers. About 1,500 bytes
// smaller binary sketch size than the standard tone library. Exclusive use of
// port registers for AVR-based microcontrollers for fastest and smallest code.
// Close to a plug-in replacement for the standard Tone library.
//
// SYNTAX:
// TimerFreeTone( pin, frequency, duration [, volume ] ) - Play a note on pin at frequency in Hz for duration in milliseconds.
// Parameters:
// * pin - Pin speaker is wired to (other wire to ground, be sure to add an inline 100 ohm resistor).
// * frequency - Play the specified frequency (should work fairly well in the 100 to 15000 Hz range).
// * duration - Set the duration to play in milliseconds. Range: 0 to 65535 (65.5 seconds).
// * volume - Optionally set the tone volume level (from 1 to 10), defaults to full volume (10).
//
// HISTORY:
// 09/12/2016 v1.5 - Fixed problem with latest release of the Arduino IDE which
// caused the library to totally stop functioning. Adjusted note duration to
// not fail on timer rollover. Now delays for note duration when frequency or
// volume are zero.
//
// 08/05/2016 v1.4 - Added optional volume parameter.
//
// 07/23/2016 v1.3 - Fixed problem with long tone play durations. Changed the
// way the note duration is calculated from a suggestion by Paul Stoffregen
// (http://www.pjrc.com/teensy/).
//
// 01/14/2015 v1.2 - Calculates duration differently for higher tone accuracy
// and smaller code size.
//
// 04/30/2014 v1.1 - Automatically sets mode of pin to OUTPUT as does the
// standard Tone library. Sets pinOutput variable to volatile to work with
// certain microcontrollers. Removed overhead parameter and calculation, fairly
// accurate anyway at audible frequencies. Even smaller binary sketch size.
//
// 04/25/2014 v1.0 - Initial release.
//
// ---------------------------------------------------------------------------
#ifndef TimerFreeTone_h
#define TimerFreeTone_h
#if defined(ARDUINO) && ARDUINO >= 100
#include <Arduino.h>
#else
#include <WProgram.h>
#include <pins_arduino.h>
#endif
void TimerFreeTone(uint8_t pin, unsigned long frequency, unsigned int duration, uint8_t volume = 10);
#endif //TimerFreeTone_h
Firmware.ino
Arduino// Include Libraries
#include "Arduino.h"
#include "DCMotor.h"
#include "NewPing.h"
#include "PiezoSpeaker.h"
// Pin Definitions
#define DCMOTOR_PIN_COIL1 3
#define HCSR04_PIN_TRIG 9
#define HCSR04_PIN_ECHO 8
#define PIEZOSPEAKER_PIN_SIG 2
// Global variables and defines
unsigned int piezoSpeakerHoorayLength = 6; // amount of notes in melody
unsigned int piezoSpeakerHoorayMelody[] = {NOTE_C4, NOTE_E4, NOTE_G4, NOTE_C5, NOTE_G4, NOTE_C5}; // list of notes. List length must match HoorayLength!
unsigned int piezoSpeakerHoorayNoteDurations[] = {8 , 8 , 8 , 4 , 8 , 4 }; // note durations; 4 = quarter note, 8 = eighth note, etc. List length must match HoorayLength!
// Constructors
DCMotor dcMotor(DCMOTOR_PIN_COIL1);
NewPing hcsr04(HCSR04_PIN_TRIG,HCSR04_PIN_ECHO);
PiezoSpeaker piezoSpeaker(PIEZOSPEAKER_PIN_SIG);
// define vars for testing menu
#define TIMEOUT 10000 //define timeout of 10 sec
char menuOption = 0;
long time0;
/* This code sets up the essentials for your circuit to work. It runs first every time your circuit is powered with electricity. */
void setup() {
// Setup Serial which is useful for debugging
// Use the Serial Monitor to view printed messages
Serial.begin(9600);
while (!Serial) ; // wait for serial port to connect. Needed for native USB
Serial.println("start");
}
/* This code is the main logic of your circuit. It defines the interaction between the components you selected. After setup, it runs over and over again, in an eternal loop. */
void loop() {
// Read data from serial monitor if received
while (Serial.available()) {
char c = Serial.read();
if (isAlphaNumeric(c)) {
menuOption = c;
printselection();
time0 = millis();
}}
if(menuOption == '1' && testTimeout()) {
//DCMotor - Test Code
// The DC motor will turn on and off for 4000ms (4 sec)
dcMotor.on(200); // 1. turns on
delay(4000); // 2. waits 4000 milliseconds (4 sec). change the value in the brackets (4000) for a longer or shorter delay.
dcMotor.off(); // 3. turns off
delay(4000); // 4. waits 4000 milliseconds (4 sec). change the value in the brackets (4000) for a longer or shorter delay.
}
else if(menuOption == '2' && testTimeout()) {
//HCSR04 - Test Code
// Read distance measurment from UltraSonic sensor
int hcsr04Dist = hcsr04.ping_cm();
delay(10);
Serial.print(F("Distance: ")); Serial.print(hcsr04Dist); Serial.println(F("[cm]"));
}
else if(menuOption == '3' && testTimeout()) {
//PiezoSpeaker - Test Code
// The Speaker will play the Hooray tune
piezoSpeaker.playMelody(piezoSpeakerHoorayLength, piezoSpeakerHoorayMelody, piezoSpeakerHoorayNoteDurations);
delay(500);
}
else
menu();
}
// This is a menu function for selecting the components to be tested
// Follow serial monitor for instrcutions
char menu()
{
Serial.println(F("\nWhich component would you like to test?"));
Serial.println(F("(1) DCMotor"));
Serial.println(F("(2) HCSR04"));
Serial.println(F("(3) PiezoSpeaker"));
Serial.println(F("(menu) send anything else or press on board reset button\n"));
while (!Serial.available());
delay(20);
}
// This section is used to print the selected option to the serial monitor
void printselection()
{
if(menuOption == '1') Serial.println(F("Now Testing DCMotor"));
else if(menuOption == '2') Serial.println(F("Now Testing HCSR04"));
else if(menuOption == '3') Serial.println(F("Now Testing PiezoSpeaker"));
else Serial.println(F("illegal input!"));
Serial.println();
}
// This is a testTimeout function for the testing duration of a component
// Time out value is set by testTimeout which is defined before setup(), you can change it to make testing duration shorter/longer
bool testTimeout()
{
if (millis() - time0 > TIMEOUT)
return false;
else
return true;
}
/*******************************************************
* Circuito.io is an automatic generator of schematics and code for off
* the shelf hardware combinations.
* Copyright (C) 2016 Roboplan Technologies Ltd.
* This program is free software: you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation, either version 3 of the License, or
* (at your option) any later version.
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
* You should have received a copy of the GNU General Public License
* along with this program. If not, see <http://www.gnu.org/licenses/>.
* In addition, and without limitation, to the disclaimers of warranties
* stated above and in the GNU General Public License version 3 (or any
* later version), Roboplan Technologies Ltd. ("Roboplan") offers this
* program subject to the following warranty disclaimers and by using
* this program you acknowledge and agree to the following:
* THIS PROGRAM IS PROVIDED ON AN "AS IS" AND "AS AVAILABLE" BASIS, AND
* WITHOUT WARRANTIES OF ANY KIND EITHER EXPRESS OR IMPLIED. ROBOPLAN
* HEREBY DISCLAIMS ALL WARRANTIES, EXPRESS OR IMPLIED, INCLUDING BUT
* NOT LIMITED TO IMPLIED WARRANTIES OF MERCHANTABILITY, TITLE, FITNESS
* FOR A PARTICULAR PURPOSE, NON-INFRINGEMENT, AND THOSE ARISING BY
* STATUTE OR FROM A COURSE OF DEALING OR USAGE OF TRADE.
* YOUR RELIANCE ON, OR USE OF THIS PROGRAM IS AT YOUR SOLE RISK.
* ROBOPLAN DOES NOT GUARANTEE THAT THE PROGRAM WILL BE FREE OF, OR NOT
* SUSCEPTIBLE TO, BUGS, SECURITY BREACHES, OR VIRUSES. ROBOPLAN DOES
* NOT WARRANT THAT YOUR USE OF THE PROGRAM, INCLUDING PURSUANT TO
* SCHEMATICS, INSTRUCTIONS OR RECOMMENDATIONS OF ROBOPLAN, WILL BE SAFE
* FOR PERSONAL USE OR FOR PRODUCTION OR COMMERCIAL USE, WILL NOT
* VIOLATE ANY THIRD PARTY RIGHTS, WILL PROVIDE THE INTENDED OR DESIRED
* RESULTS, OR OPERATE AS YOU INTENDED OR AS MAY BE INDICATED BY ROBOPLAN.
* YOU HEREBY WAIVE, AGREE NOT TO ASSERT AGAINST, AND RELEASE ROBOPLAN,
* ITS LICENSORS AND AFFILIATES FROM, ANY CLAIMS IN CONNECTION WITH ANY OF
* THE ABOVE.
********************************************************/


_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments