


Hardware components | ||||||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
| ||||||
| ||||||
| ||||||
Hand tools and fabrication machines | ||||||
| ||||||
| ||||||
| ||||||
What Do I Build Next? Some Assembly Required? Part 7 of 4... part 2, how can this be Part 7 of 4? I've been asked.
Because.
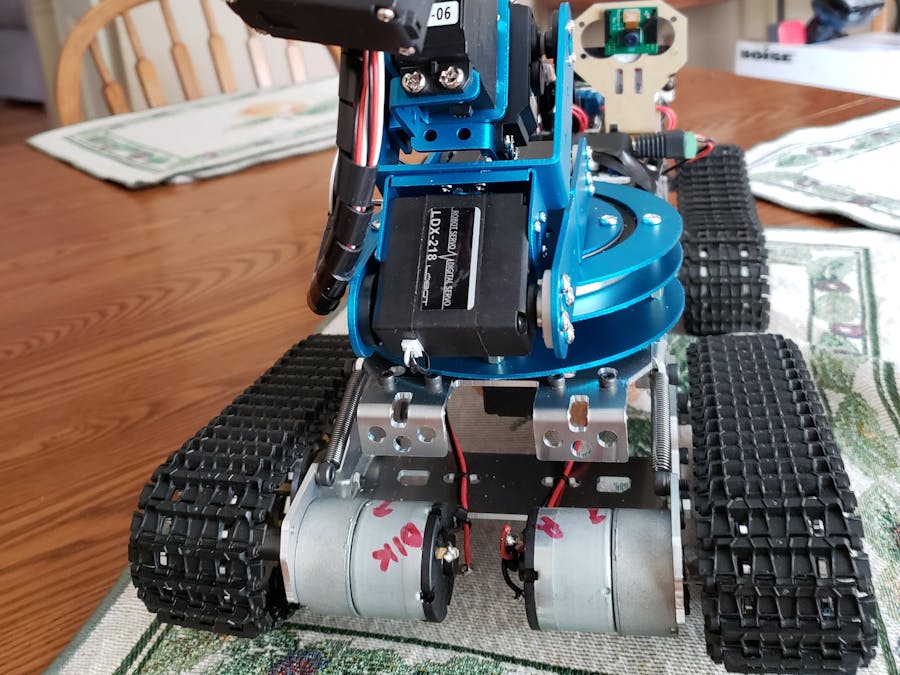
In this part, I am actually disassembling the LewanSoul LeArm I built in "What Do I Build Next? Some Assembly Required? Part 6 of 4" Part1... in order to add the LeArm and electronics controller onto another previous Tank Robot build? I forget know but it's published.
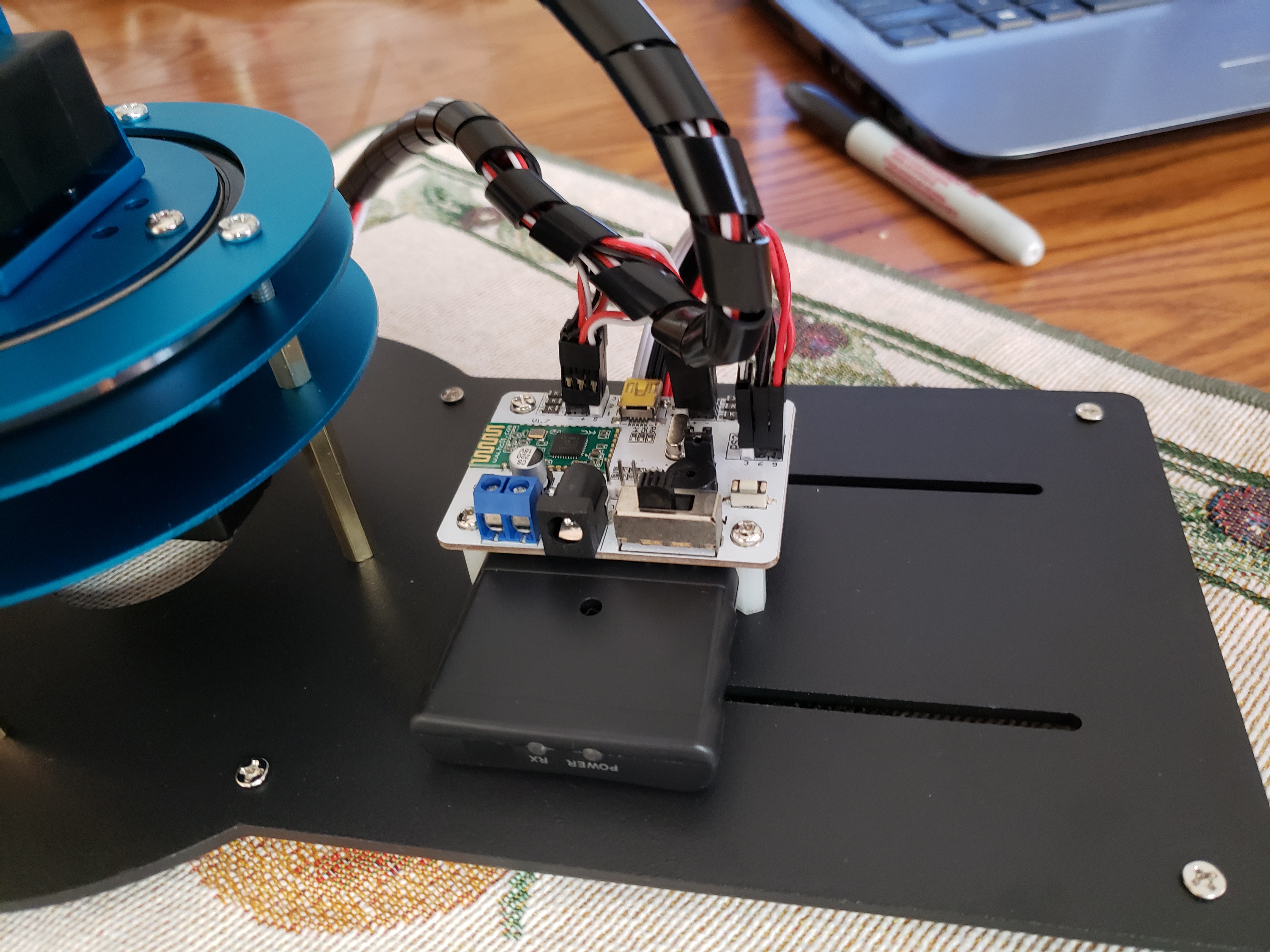
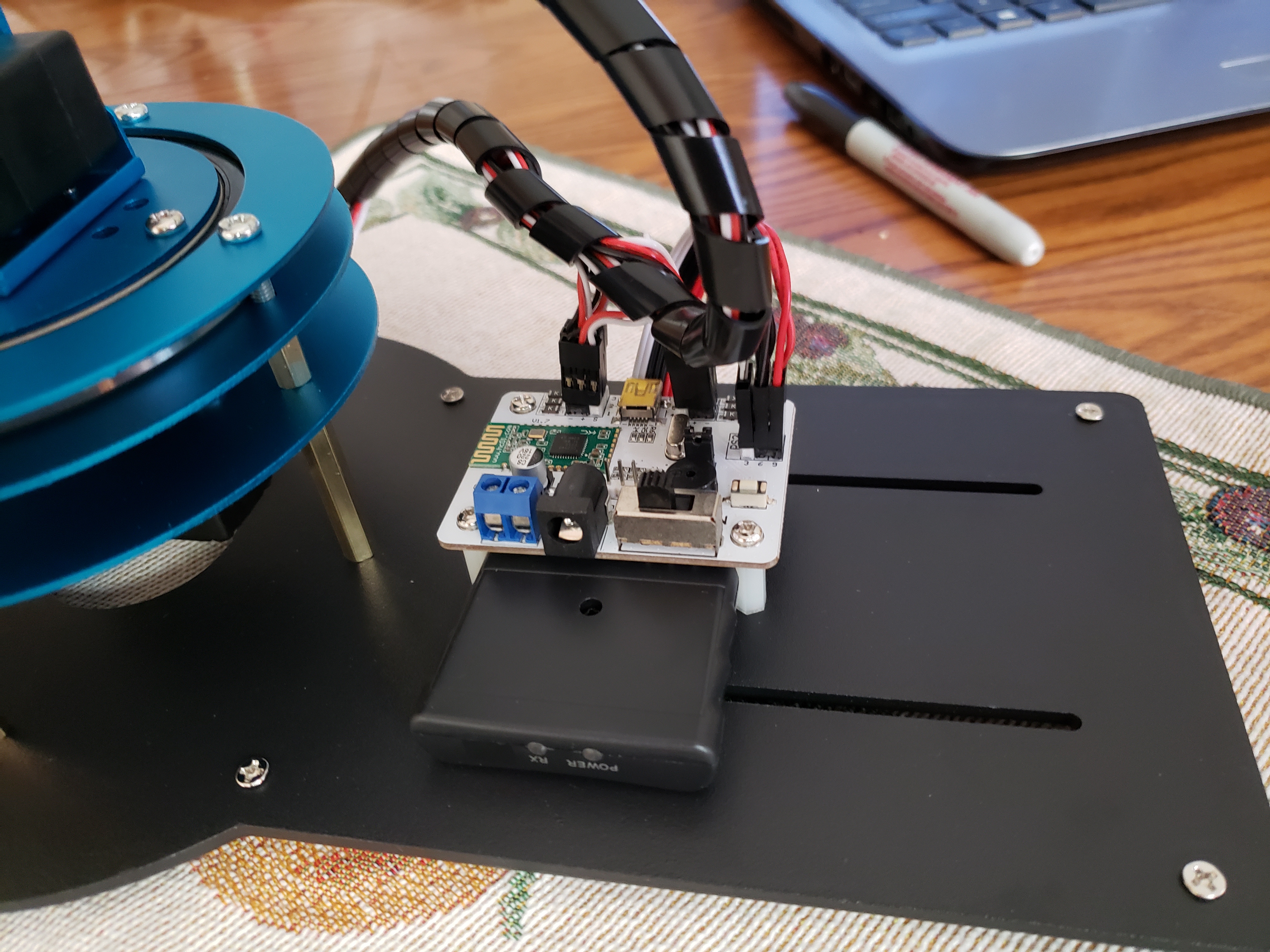
What makes this the most complicated is that ALL control mechanisms, video streaming, web access, robot tank motion, the LeArm all have their own controlling application. I have used two cell phones, my laptop just to provide a painful proof-of-concept. My thoughts... one APP to control the Tank mobility with POV video streaming to get Tank to area of interest. Another App to control the Robot Arm to pickup whatever interested me in the first place.
I know some company "Kookye or Osoyoo" or "Somebody" on Amazon had a Tank with an Arm and FPV video as well but I can "MacGyver" it.
Now for the disassembly:
Now to MacGyver it back together.....
Pay attention to servo 6 orientation, position for proper front to back
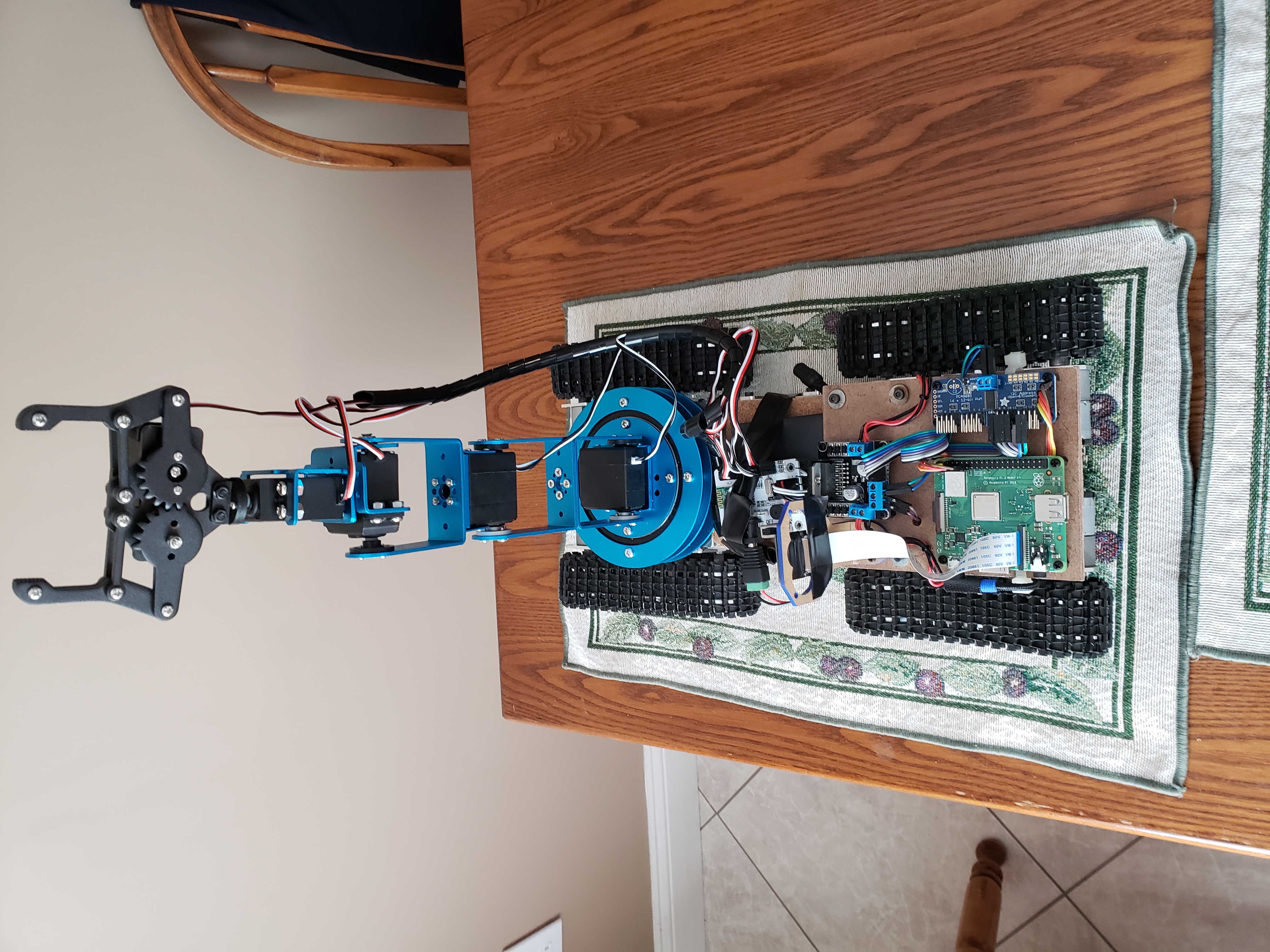
combined:
Three different APPS/devices to make everything..smoothly..painfully move
Am I complete? No.... I need a two foot Raspberry Pi Camera cable to move the FPV Raspberry Pi Camera from a fixed mount on the Robot to a movable spot on the LeArm claw assembly...to give a better point of view for the arm grappling....or do I add another surprise for claw vision?







{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments