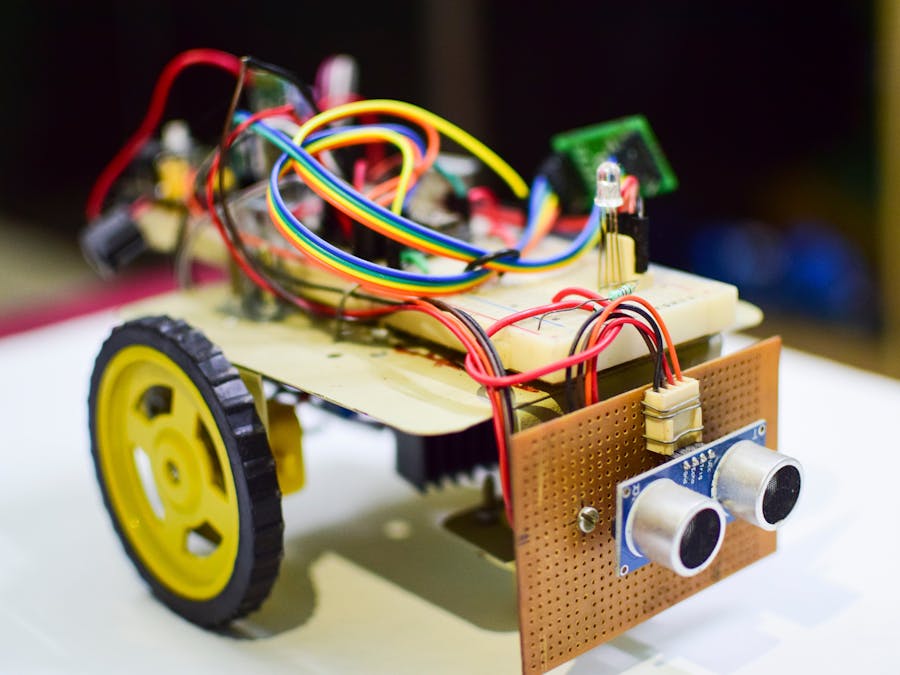
/* Bluetooth Controlled Obstacle Avoidance Robot
Prepared by : Alok Talukdar
Date : 09.05.2020
*/
#include<SoftwareSerial.h> // To use any pin on Arduino for Serial communication.
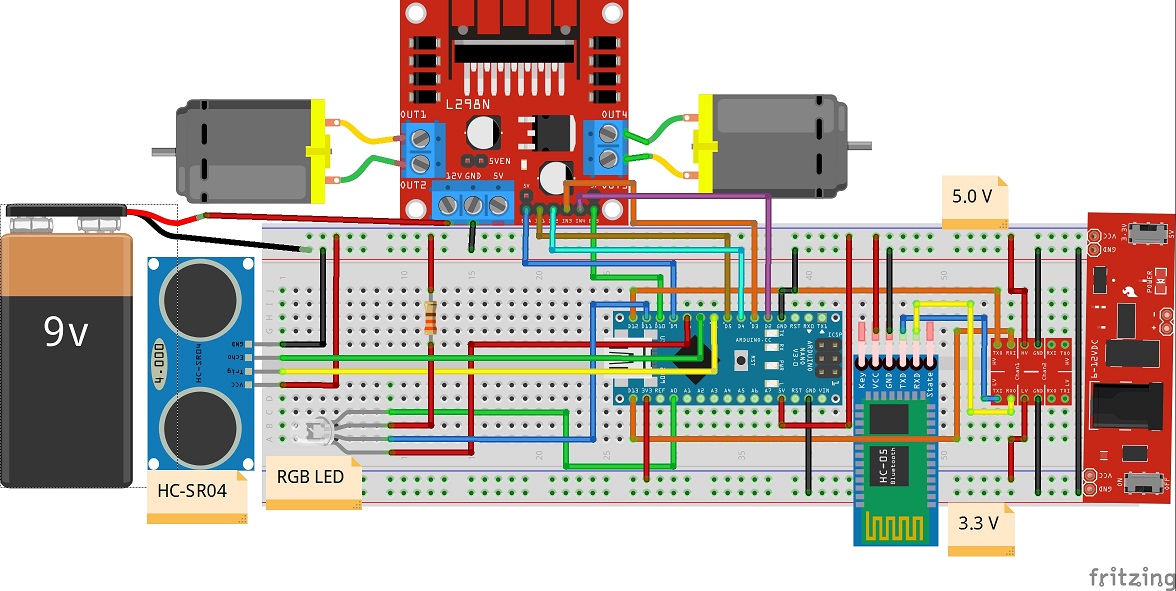
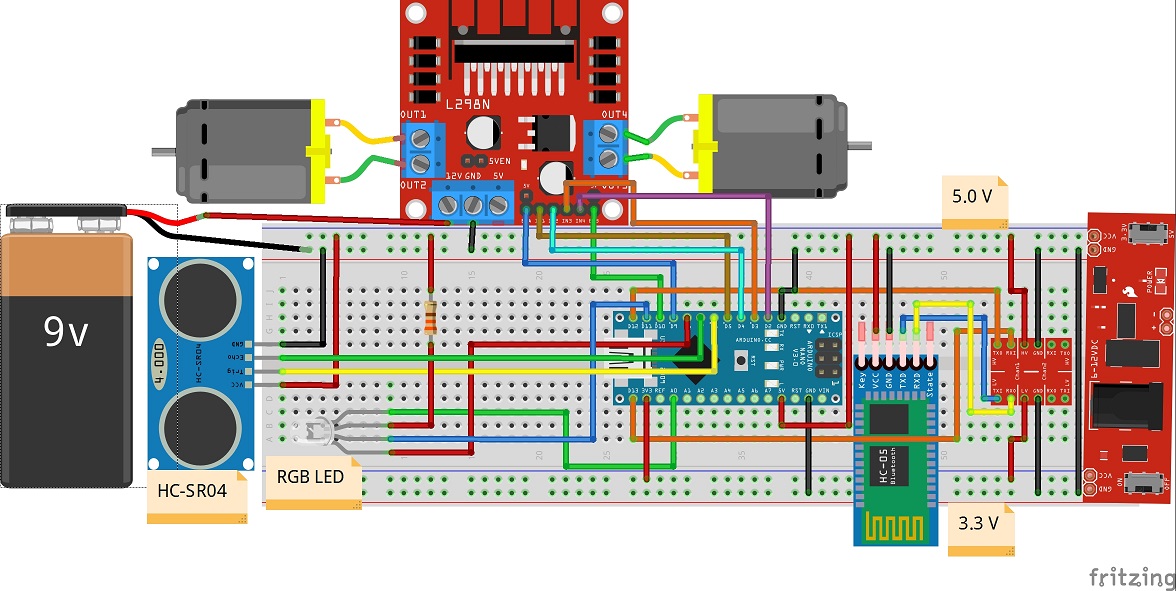
// Define the digital pins for L298 motor control module.
#define IN1 5 // for right motor
#define IN2 4 // for right motor
#define IN3 3 // for left motor
#define IN4 2 // for left motor
#define ENA 9 // Enable A for PWM control of right motor
#define ENB 10 // Enable B for PWM control of left motor
// Define the digital pins for RGB LED control
#define redLED 8
#define greenLED A0
#define blueLED 11
// Set up the HC-SR04 Ultrasonic sensor module
const int trigPin = 6; // TRIG pin connected to pin D6 of Arduino Nano
const int echoPin = 7; // ECHO pin connected to pin D7 of Arduino Nano
int i,j,k = 0;
float duration,distance; // variables for distance measurement
// Set up the HC05 Bluetooth module
SoftwareSerial mySerial(12,13); // (12 --> RX , 13 --> TX)
String data; // variables for Bluetooth control
int btVal;
void setup() {
// put your setup code here, to run once:
pinMode(trigPin,OUTPUT); // Configure pin D6 to transmit ultrasonic pulses
pinMode(echoPin,INPUT); // Configure pin D7 to receive ultrasonic pulses
mySerial.begin(9600); // Configure the Software serial at Baud rate 9600
pinMode(IN1,OUTPUT); // Configure IN1 - IN4 as OUTPUT to control motors
pinMode(IN2,OUTPUT);
pinMode(IN3,OUTPUT);
pinMode(IN4,OUTPUT);
pinMode(ENA,OUTPUT);
pinMode(ENB,OUTPUT);
pinMode(redLED,OUTPUT);
pinMode(blueLED,OUTPUT);
pinMode(greenLED,OUTPUT);
digitalWrite(IN1,LOW); // Configure the status of the IN1 - IN4 as LOW
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW);
analogWrite(redLED,255); // Switch OFF LED's. RGB LED is common anode type.
digitalWrite(blueLED,HIGH);
digitalWrite(greenLED,HIGH);
}
void loop()
{
// put your main code here, to run repeatedly:
while (mySerial.available())
{
data = mySerial.readStringUntil('\n');
}
btVal = (data.toInt());
switch (btVal)
{
case 1:
forward();
digitalWrite(greenLED,LOW);
analogWrite(redLED,255);
digitalWrite(blueLED,HIGH);
dist();
break;
case 2:
reverse();
digitalWrite(greenLED,HIGH);
analogWrite(redLED,255);
digitalWrite(blueLED,LOW);
break;
case 3:
left();
break;
case 4:
right();
break;
case 5:
stoprobot();
digitalWrite(greenLED,HIGH);
analogWrite(redLED,0);
digitalWrite(blueLED,HIGH);
break;
default:
digitalWrite(greenLED,HIGH);
analogWrite(redLED,255);
digitalWrite(blueLED,HIGH);
break;
}
if (mySerial.available() < 0)
{
//Serial.println("No Bluetooth Data ");
}
}
// motor control function declarations
void forward()
{
for(i=0;i<=100;i++)
{
analogWrite(ENA,i);
analogWrite(ENB,i);
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
}
}
void reverse()
{
for(j=0;j<=100;j++)
{
analogWrite(ENA,j);
analogWrite(ENB,j);
digitalWrite(IN1,LOW);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,LOW);
}
}
void left()
{
analogWrite(ENA,127);
analogWrite(ENB,0);
digitalWrite(IN1,HIGH);
digitalWrite(IN2,LOW);
digitalWrite(IN3,HIGH);
digitalWrite(IN4,HIGH);
}
void right()
{
analogWrite(ENA,0);
analogWrite(ENB,127);
digitalWrite(IN1,HIGH);
digitalWrite(IN2,HIGH);
digitalWrite(IN3,LOW);
digitalWrite(IN4,HIGH);
}
void stoprobot()
{
analogWrite(ENA,0);
analogWrite(ENB,0);
digitalWrite(IN1,LOW);
digitalWrite(IN2,LOW);
digitalWrite(IN3,LOW);
digitalWrite(IN4,LOW);
}
void dist()
{
digitalWrite(trigPin,LOW); // to send a pulse via the TRIG pin of HC-SR04
delayMicroseconds(2);
digitalWrite(trigPin,HIGH);
delayMicroseconds(10);
digitalWrite(trigPin,LOW);
duration = pulseIn(echoPin,HIGH); // read the duration of the pulse
distance = (duration*0.0343)/2; // measure the distance in cms. Speed of sound is 340 m/s or 0.0343 cm/us
if(distance<20) // if distance is < 20 cms , STOP robot
{
stoprobot();
digitalWrite(greenLED,HIGH);
analogWrite(redLED,0);
digitalWrite(blueLED,HIGH);
}
delay(1000);
}





















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.