

Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 4 | |||
Software apps and online services | ||||||
 |
| |||||
Here I present Arduino library to control DC motor. The library is having so many facilities and flexibility that it can control any DC motor in required manner. The library is design as per the industrialmotion control requirements. The library is having 16 different functionalities such that it can control the motor in most versatile manner.Here is the list of facilities in library
1. It controls direction of rotation of motor
2. It controls speed of motor from 0-100%
3. It can provide soft start to motor in specified time – means motor speed will increase from 0% to desire level in specified time
4. It can provide smooth stop to motor in specified time - means motor speed will decrease from current speed to 0% in specified time
5. It can apply jog control to motor in either direction – means motor will jerk in specified direction
6. It can apply DC BREAK (means immediate or emergency STOP) to motor
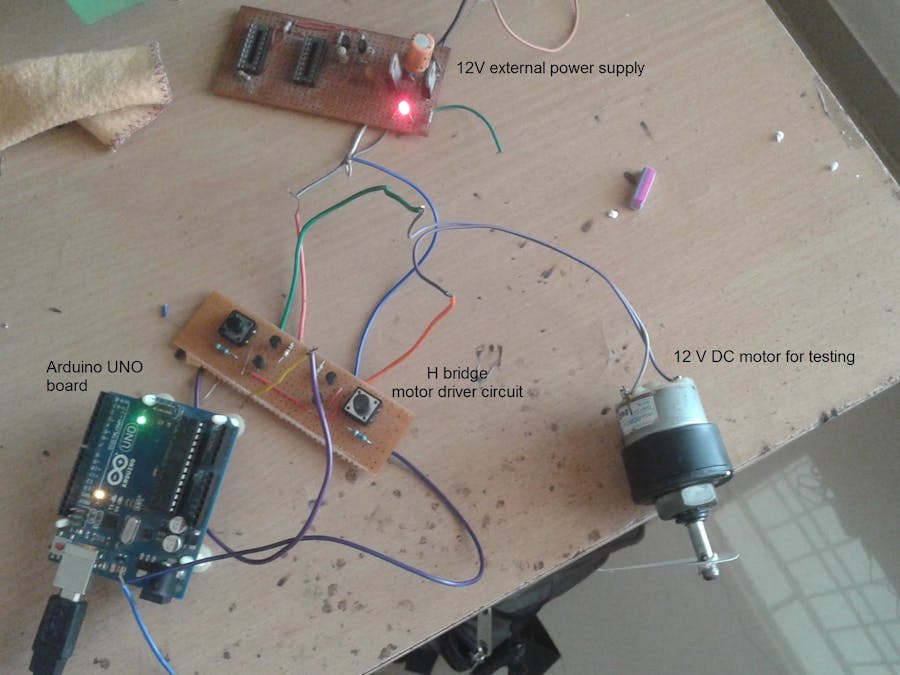
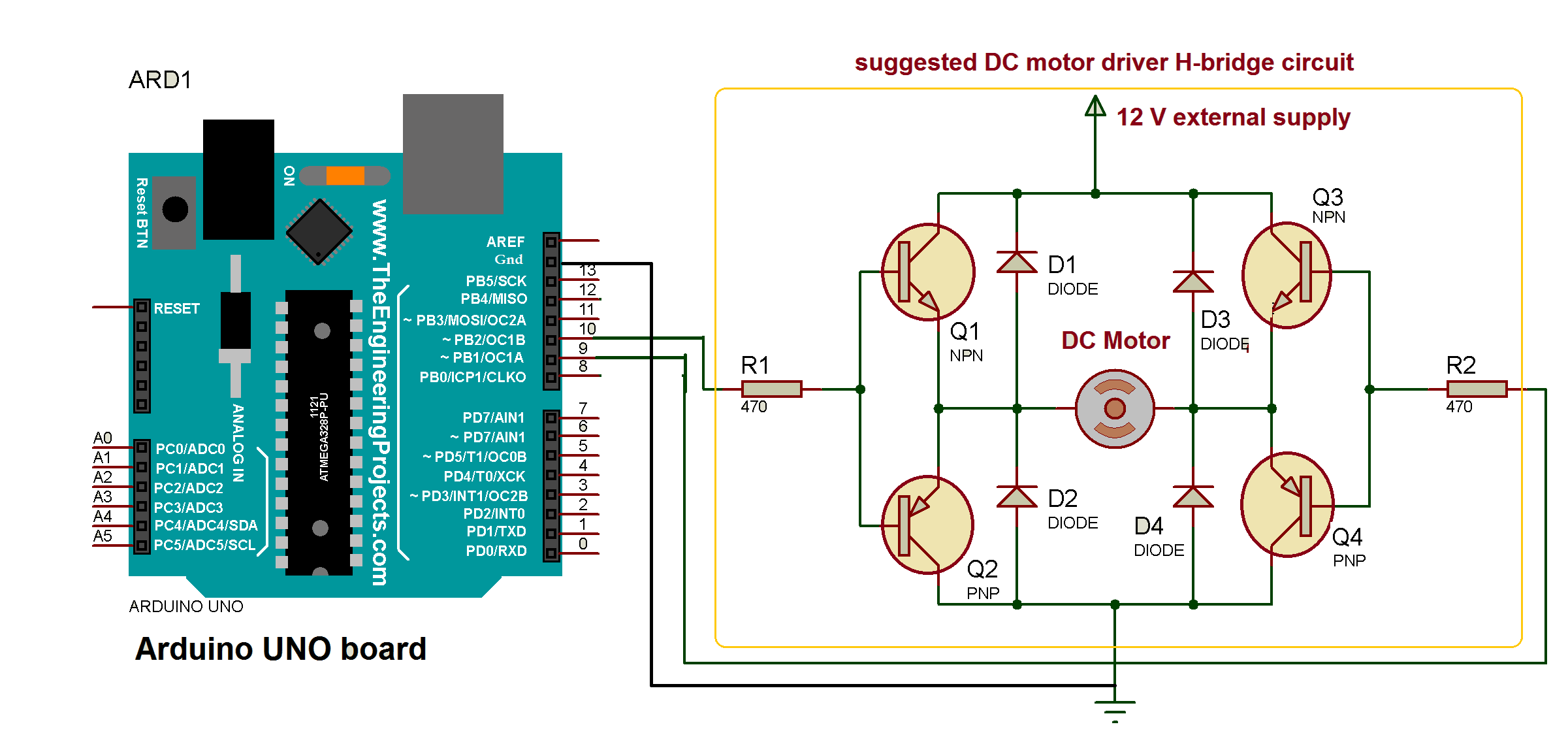
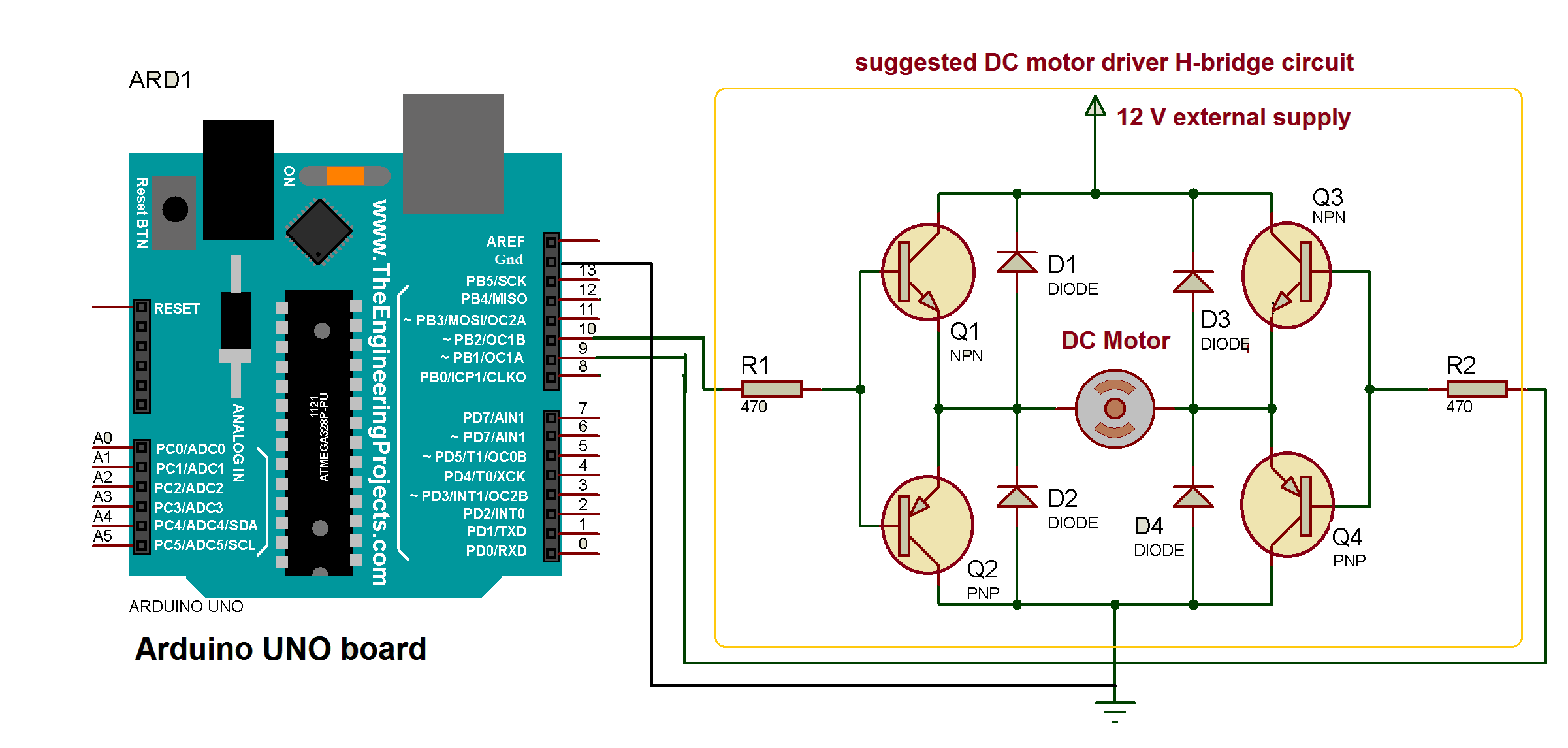
The brief descriptions of all library functions are given here. Some examples are given afterwards that explains how motor is controlled using this library. There are three videos given that shows the demonstration of these examples. At last, the circuit is suggested that uses H-Bridge circuit that is widely used to control DC motors.
To use this library in your arduino sketch just copy the DC_Motor folder into the root directory of arduino library folder like C:\arduino-1.6.7\libraries
Description of library functions:1. DC_Motor(int pin1, int pin2): this function declares arduino pins that drives DC motor
2. DC_Motor(int pin1, int pin2, int speed_flag): this function declares analog output pins of arduino that drives DC motor
3. start_motor(int dir): this function starts rotating motor in specified direction.If direction is 1 – motor will start rotating forward and vice versa
4. forward():this function will start rotating motor in forward direction
5. reverse():this function will start rotating motor in reverse direction
6. dc_break():this function will instantly stop rotating motor*
7. stop_motor(): this function will stop rotating motor
8. jogg_full_speed(int dir) : this function will apply jerk to motor for 5 sec at full speed in required direction
*Note: - this function will only work if DC motor has internal arrangements for such DC break. Also, proper motor driver circuit has to be design with dynamic braking resistances (DBR) and complete care has to betaken so that motor or circuit should not get damaged.
All above functions provide simple control to DC motor. They do not control speed of motor. The next 8 functions controls speed as well as direction of motor. But it is required to select analog output pins of arduino to use these functions. The DC motor has to be initialized with 2nd function along with speed flag set to 1
9. set_speed(int speed): this function will set DC motor speed between 0 to 100%
10. forward_with_set_speed(): this function will start rotating DC motor forward at set speed
11. reverse_with_set_speed(): this function will start rotating DC motor reverse at set speed
12. run_motor(int dir, int speed): this function will rotate DC motor in either direction at set speed
13. jogg_set_speed(int dir, int speed): this function will apply jerk to motor in either direction at set speed
14. motor_speed_zero()*: the function will reduce motor speed to 0 – means stop the motor
15. soft_start(int dir, int speed, inttime_in_sec) :this function will increase the speed of motor from 0 to desire level in specified time in either direction. The time has to selected in seconds
16. smooth_stop(int time_in_sec): this function will reduce the motor speed from current running speed to 0 in specified time. The time has to selected in seconds
*Note: one cannot use stop_motor() function here because it gives digital output while this function gives minimum analog output to make DC motor speed zero. When controlling DC motor with speed, don’t just stop motor but make its speed zero.
Examples:
1) Rotate DC motor forward and reverse at full speed (nospeed control)
/*this program will rotate DC motor forward for 5 sec
then stop for 2 sec and again rotate motor reverse for
5 sec, stop for 2 sec continuously
created by A M Bhatt (+91-9998476150), Gujarat, INDIA
on 12/10/2016
*/
#include<DC_Motor.h>
DC_Motormotor(8, 12);
voidsetup()
{
}
void loop()
{
motor.forward();
delay(5000);
motor.stop_motor();
delay(2000);
motor.reverse();
delay(5000);
motor.stop_motor();
delay(2000);
}
2) Rotate DC motor forward and reverse at set speed (withspeed control)
/*this program will rotate DC motor forward for 5 sec
at 40%speed then stop for 2 sec and again rotate motor reverse for
5 sec at 80% speed continuously
created by A M Bhatt (+91-9998476150), Gujarat, INDIA
on 12/10/2016
*/
#include<DC_Motor.h>
DC_Motor motor2(9, 10, 1);
voidsetup()
{
}
void loop()
{
motor2.set_speed(40);
motor2.forward_with_set_speed();
delay(5000);
motor2.motor_speed_zero();
delay(2000);
motor2.set_speed(80);
motor2.reverse_with_set_speed();
delay(5000);
motor2.motor_speed_zero();
delay(2000);
}
3) Apply jog to motor in both direction with and withoutspeed control
/*this program applies jog to two different DC motors
* it applies jog to 1st motor in full speed in both direction
* and then provides jog to 2nd motor with 80%speed in reverse
* direction and 30% speed in forward direction
* created by Ashutosh M Bhatt(+91-9998476150), Gujarat (INDIA)
* on 22/10/2016
*/
#include<DC_Motor.h>
DC_Motor motor(8, 12);
DC_Motor motor2(9, 10, 1);
voidsetup()
{
}
voidloop()
{
motor.jogg_full_speed(1);
motor.jogg_full_speed(0);
motor2.jogg_set_speed(0, 80);
motor2.jogg_set_speed(1, 30);
}
4) Apply soft start and smooth stop to motor/*this program will give soft start to motor and increase its speed
from 0 to 90% in 10 sec in forward direction
then it gives smooth stop from 90% to 0 in 5 sec
again soft start from 0 to 50% in 6 sec in reverse direction
and finally smooth stop from 50% to 0 in 3 sec
created by A M Bhatt (+91-9998476150), Gujarat, INDIA
on 12/10/2016
*/
#include<DC_Motor.h>
DC_Motor motor2(9, 10, 1);
voidsetup()
{
}
voidloop()
{
motor2.soft_start(1, 90, 10);
delay(3000);
motor2.smooth_stop(5);
motor2.soft_start(0, 50, 6);
delay(3000);
motor2.smooth_stop(3);
}


{kind=link}
Comments