



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
There are a couple different components to this project:
1) Create a system that reads in the inputs from the remote (that I am replacing with this)
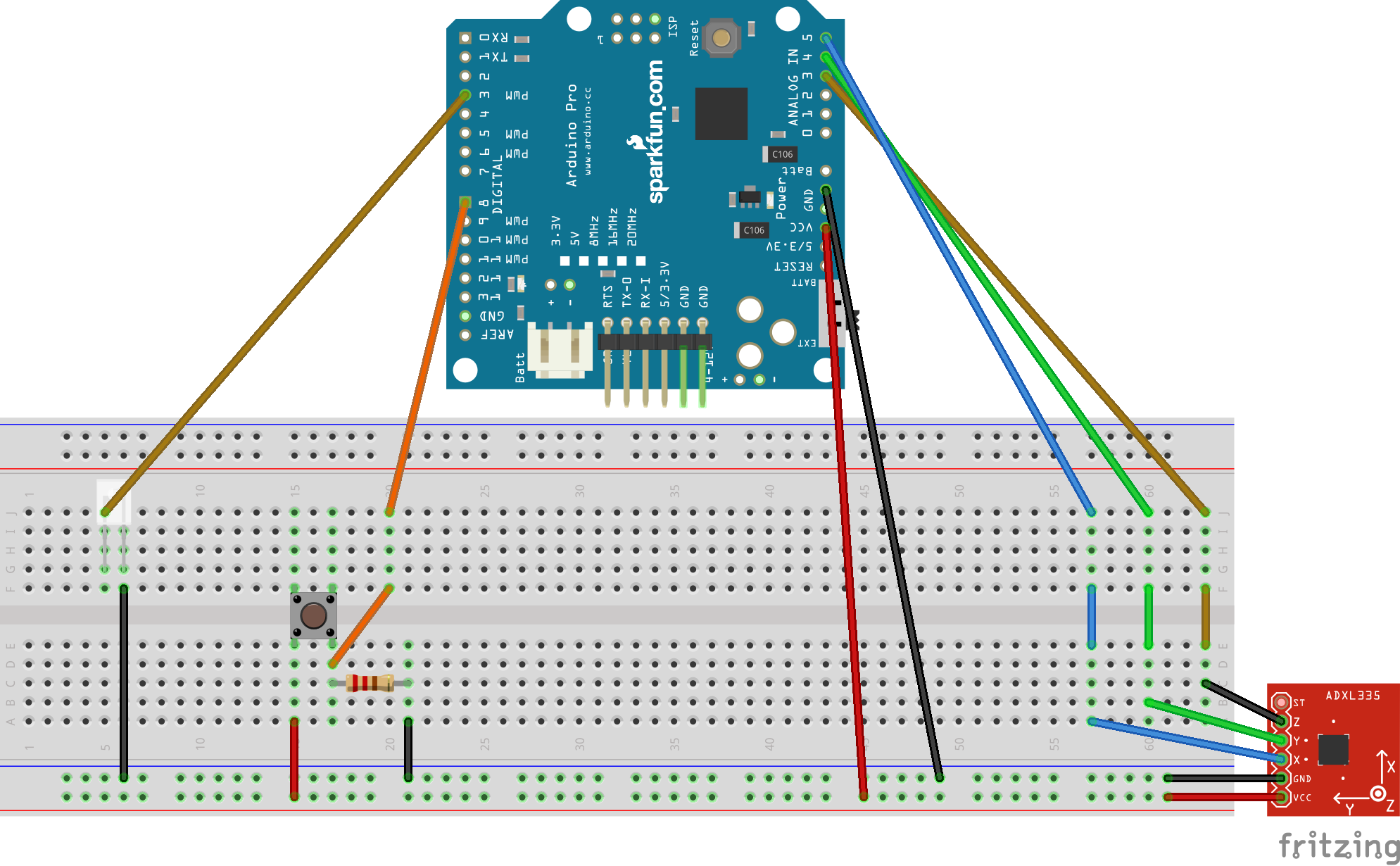
2) Create a system that can transmit those signals (I started with a Arduino Pro)
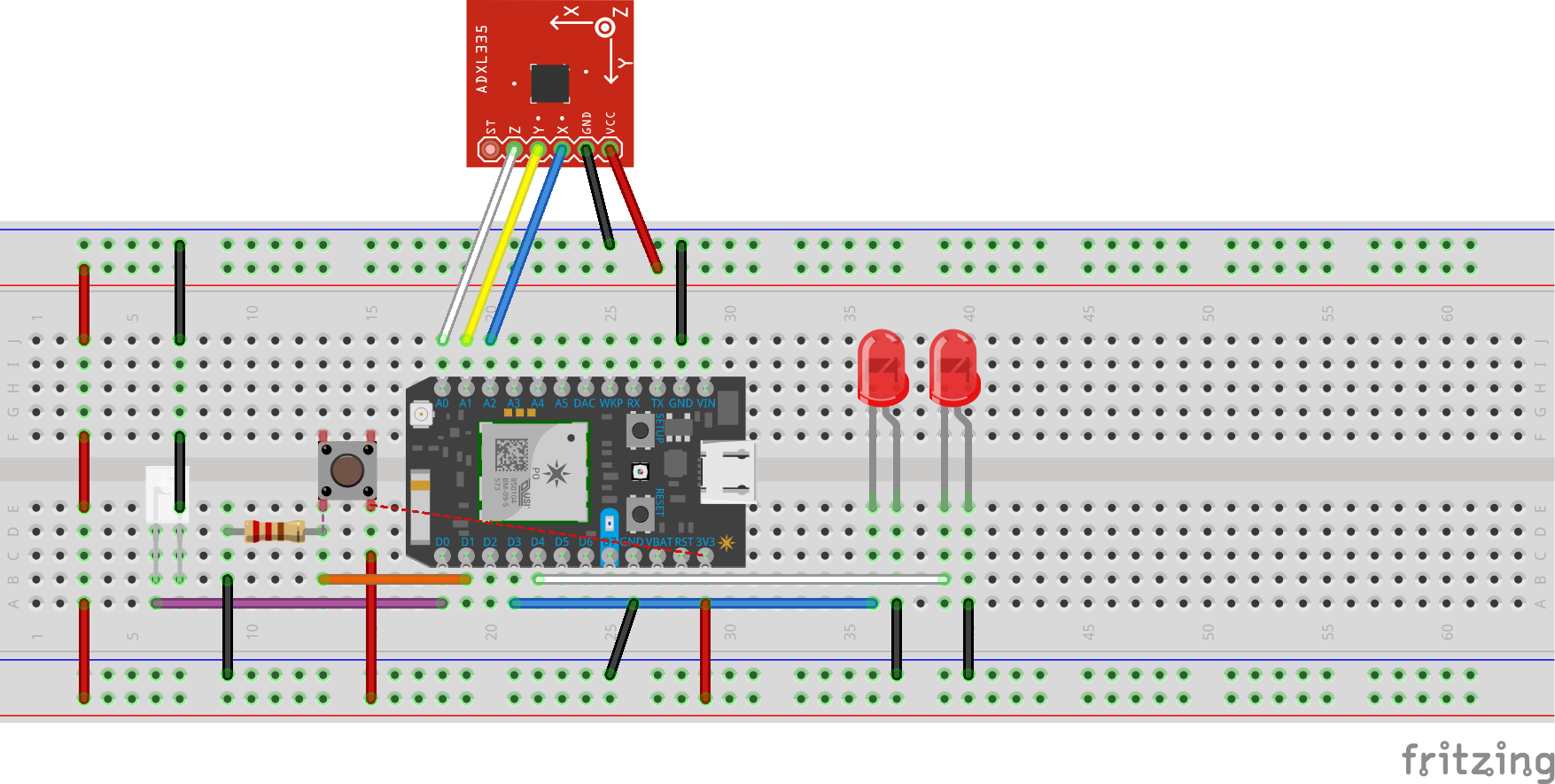
3) Change it to work with the Particle Photon
4) Open up DL-44 blaster I bought online
5) Move from breadboard to PCB
6) Paint the DL-44 blaster to look more accurate
7) Enjoy a really cool and functional remote
1) Follow this tutorial I found that uses any Arduino:
http://www.righto.com/2009/09/arduino-universal-remote-record-and.html
Once the circuit is built, take the remote that you are trying to replace, open up the serial port and read in the values. Note all the values for the commands you want. It'll say whether or not it is Sony, NEC or whatever other ones there are.
2)
The Arduino code is attached below.
3)
In order for the IRremote.h file to work for the Particle Photon, the file needs to be slightly modified from the Arduino file. The code is found below.
4) I bought a toy blaster (in "fun" safety white and orange) online. The good thing is that the middle of it is almost all empty space which means that you don't have to be very careful about how you insert all your components.
5) I opened up the blaster and took out the components from there (I just cut out the small PCB in there and left the leads for the battery). Connect the positive lead to the Vin on the photon.
6)
7)
/*
* IRrecord: record and play back IR signals as a minimal
* An IR detector/demodulator must be connected to the input RECV_PIN.
* An IR LED must be connected to the output PWM pin 3.
* A button must be connected to the input BUTTON_PIN; this is the
* send button.
* A visible LED can be connected to STATUS_PIN to provide status.
*
* The logic is:
* If the button is pressed, send the IR code.
* If an IR code is received, record it.
*
* Version 0.11 September, 2009
* Copyright 2009 Ken Shirriff
* http://arcfn.com
*/
#include <IRremote.h>
int RECV_PIN = 11;
int BUTTON_PIN = 12;
int STATUS_PIN = 13;
IRrecv irrecv(RECV_PIN);
IRsend irsend;
decode_results results;
void setup()
{
Serial.begin(9600);
irrecv.enableIRIn(); // Start the receiver
pinMode(BUTTON_PIN, INPUT);
pinMode(STATUS_PIN, OUTPUT);
}
// Storage for the recorded code
int codeType = -1; // The type of code
unsigned long codeValue; // The code value if not raw
unsigned int rawCodes[RAWBUF]; // The durations if raw
int codeLen; // The length of the code
int toggle = 0; // The RC5/6 toggle state
// Stores the code for later playback
// Most of this code is just logging
void storeCode(decode_results *results) {
codeType = results->decode_type;
int count = results->rawlen;
if (codeType == UNKNOWN) {
Serial.println("Received unknown code, saving as raw");
codeLen = results->rawlen - 1;
// To store raw codes:
// Drop first value (gap)
// Convert from ticks to microseconds
// Tweak marks shorter, and spaces longer to cancel out IR receiver distortion
for (int i = 1; i <= codeLen; i++) {
if (i % 2) {
// Mark
rawCodes[i - 1] = results->rawbuf[i]*USECPERTICK - MARK_EXCESS;
Serial.print(" m");
}
else {
// Space
rawCodes[i - 1] = results->rawbuf[i]*USECPERTICK + MARK_EXCESS;
Serial.print(" s");
}
Serial.print(rawCodes[i - 1], DEC);
}
Serial.println("");
}
else {
if (codeType == NEC) {
Serial.print("Received NEC: ");
if (results->value == REPEAT) {
// Don't record a NEC repeat value as that's useless.
Serial.println("repeat; ignoring.");
return;
}
}
else if (codeType == SONY) {
Serial.print("Received SONY: ");
}
else if (codeType == RC5) {
Serial.print("Received RC5: ");
}
else if (codeType == RC6) {
Serial.print("Received RC6: ");
}
else {
Serial.print("Unexpected codeType ");
Serial.print(codeType, DEC);
Serial.println("");
}
Serial.println(results->value, HEX);
codeValue = results->value;
codeLen = results->bits;
}
}
void sendCode(int repeat) {
if (codeType == NEC) {
if (repeat) {
irsend.sendNEC(REPEAT, codeLen);
Serial.println("Sent NEC repeat");
}
else {
irsend.sendNEC(codeValue, codeLen);
Serial.print("Sent NEC ");
Serial.println(codeValue, HEX);
}
}
else if (codeType == SONY) {
irsend.sendSony(codeValue, codeLen);
Serial.print("Sent Sony ");
Serial.println(codeValue, HEX);
}
else if (codeType == RC5 || codeType == RC6) {
if (!repeat) {
// Flip the toggle bit for a new button press
toggle = 1 - toggle;
}
// Put the toggle bit into the code to send
codeValue = codeValue & ~(1 << (codeLen - 1));
codeValue = codeValue | (toggle << (codeLen - 1));
if (codeType == RC5) {
Serial.print("Sent RC5 ");
Serial.println(codeValue, HEX);
irsend.sendRC5(codeValue, codeLen);
}
else {
irsend.sendRC6(codeValue, codeLen);
Serial.print("Sent RC6 ");
Serial.println(codeValue, HEX);
}
}
else if (codeType == UNKNOWN /* i.e. raw */) {
// Assume 38 KHz
irsend.sendRaw(rawCodes, codeLen, 38);
Serial.println("Sent raw");
}
}
int lastButtonState;
void loop() {
// If button pressed, send the code.
int buttonState = digitalRead(BUTTON_PIN);
if (lastButtonState == HIGH && buttonState == LOW) {
Serial.println("Released");
irrecv.enableIRIn(); // Re-enable receiver
}
if (buttonState) {
Serial.println("Pressed, sending");
digitalWrite(STATUS_PIN, HIGH);
sendCode(lastButtonState == buttonState);
digitalWrite(STATUS_PIN, LOW);
delay(50); // Wait a bit between retransmissions
}
else if (irrecv.decode(&results)) {
digitalWrite(STATUS_PIN, HIGH);
storeCode(&results);
irrecv.resume(); // resume receiver
digitalWrite(STATUS_PIN, LOW);
}
lastButtonState = buttonState;
}
#include "IRremote.h"
// Codes for Sony programs
// Open - Sony code 68B47
// Input - Sony code A50
// Volume Up - Sony code 490 - NEC Code 10EF00FF
// Volume Down - Sony code C90 - NEC code 10EF807F
// Channel Up - NEC code 10EF40BF
// Channel Down - NEC code 10EFC03F
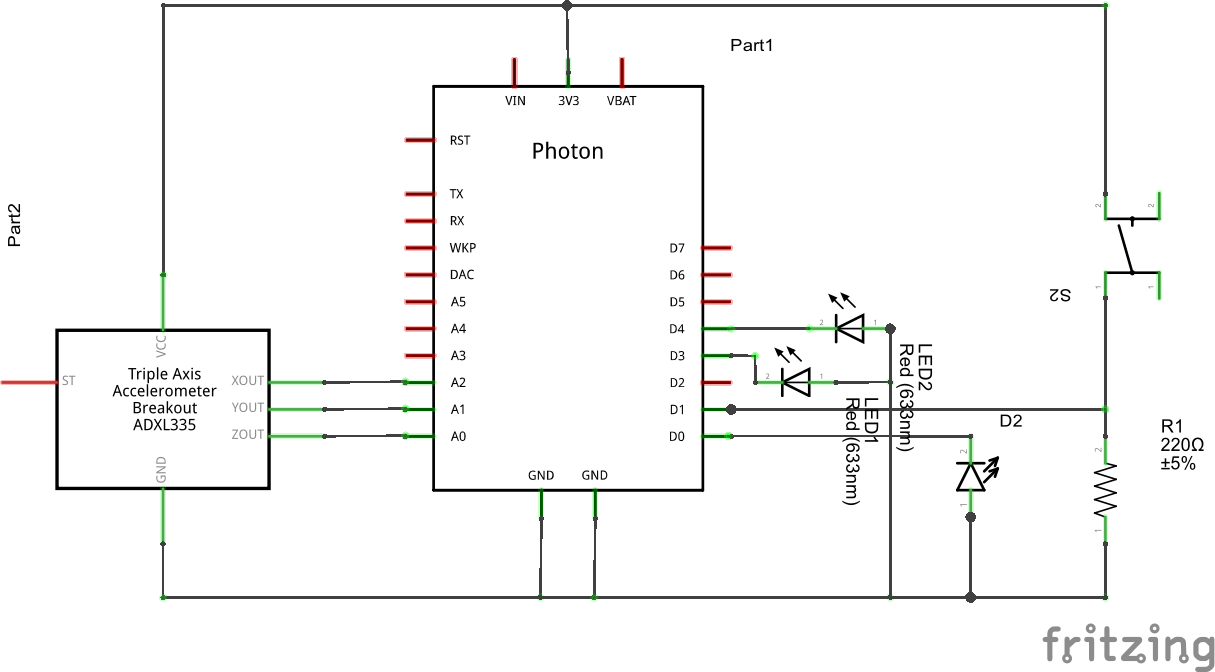
// I set D0 as the pin that has my IR LED
IRsend irsend(D0);
// I set D3 as the pin that my button is connected to
const int buttonPin = D3;
// I set the Right/Left orientation pin to A2
const int LR = A2;
// I do not use this pin so I just have is set as ypin
const int ypin = A1;
// I set the Up/Down orientation pin to A0
const int UD = A0;
// I set buttonState to 0
int buttonState = 0;
// I set my initial int states to 0 (I'm using this for the accelerometer information)
int UDState = 0;
int LRState = 0;
// Start setup()
void setup() {
// Set the buttonPin (D3) as an input
pinMode(buttonPin, INPUT);
// set A2, A1 and A0 as inputs
pinMode(LR,INPUT);
pinMode(ypin,INPUT);
pinMode(UD,INPUT);
}
// Start the loop()
void loop() {
// I read in the value from D3 to figure out if it's high or low
buttonState = digitalRead(buttonPin);
// If the value is high:
if (buttonState == HIGH) {
// Read in the values for Up/Down and Left/Right to determine ranges
UDState = analogRead(UD);
LRState = analogRead(LR);
// perfectly left had a value on A2 of 2600, perfectly right had a value of 1850
// perfectly upright had a value on A0 of 2300, perfectly upside down had a value of 1750
// This makes A0 have a range of ~1750 <= A0 <= ~2300
// This makes A2 have a range of ~1850 <= A2 <= ~2600
// If the Up/Down state is above 2300 (which is a little higher than the value of
// perfectly right)
if (UDState > 2300) {
// Send the value for Channel Up (which I found experimentally)
irsend.sendNEC(0x10ef40bf, 32); // Crosley TV Channel Up
delay(40);
}
// If it's oriented in the downward direction, send the value for channel down
else if (UDState < 1900) {
irsend.sendNEC(0x10efc03f, 32); // Crosley TV Channel Down
delay(40);
}
// If it's not those two directions then it must be oriented right or left
else {
// If the LRState is oriented to the left then I lower the volume
if (LRState > 2000) {
irsend.sendNEC(0x10ef807f, 32); // Crosley TV Volume Down
delay(40);
}
// If it's not oriented in that direction then it must be oriented right,
// and send the signal to raise the voluem
else {
irsend.sendNEC(0x10ef00ff, 32); // Crosley TV Volume Up
delay(40);
}
} // end of if statement
} // end of if statement
// Wait 100 ms before checking if the button is high again
delay(100);
} // end of loop
/*
* IRremote
* Version 0.11 August, 2009
* Copyright 2009 Ken Shirriff
* For details, see http://arcfn.com/2009/08/multi-protocol-infrared-remote-library.html
*
* Modified by Paul Stoffregen <paul@pjrc.com> to support other boards and timers
* Modified by Mitra Ardron <mitra@mitra.biz>
* Added Sanyo and Mitsubishi controllers
* Modified Sony to spot the repeat codes that some Sony's send
* Modified by Gaspard van Koningsveld to trim out IRrecv, not using PWM anymore, allow setting of IR LED pin, and make it compatible with the Spark Core v1.0 (STM32F103CB based)
*
* Interrupt code based on NECIRrcv by Joe Knapp
* http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1210243556
* Also influenced by http://zovirl.com/2008/11/12/building-a-universal-remote-with-an-arduino/
*
* JVC and Panasonic protocol added by Kristian Lauszus (Thanks to zenwheel and other people at the original blog post)
*/
#include "IRremote.h"
#include "application.h"
IRsend::IRsend(int irPin) : irPin(irPin) {};
void IRsend::sendNEC(unsigned long data, int nbits)
{
enableIROut(38);
mark(NEC_HDR_MARK);
space(NEC_HDR_SPACE);
for (int i = 0; i < nbits; i++) {
if (data & TOPBIT) {
mark(NEC_BIT_MARK);
space(NEC_ONE_SPACE);
}
else {
mark(NEC_BIT_MARK);
space(NEC_ZERO_SPACE);
}
data <<= 1;
}
mark(NEC_BIT_MARK);
space(0);
}
void IRsend::sendSony(unsigned long data, int nbits) {
enableIROut(40);
mark(SONY_HDR_MARK);
space(SONY_HDR_SPACE);
data = data << (32 - nbits);
for (int i = 0; i < nbits; i++) {
if (data & TOPBIT) {
mark(SONY_ONE_MARK);
space(SONY_HDR_SPACE);
}
else {
mark(SONY_ZERO_MARK);
space(SONY_HDR_SPACE);
}
data <<= 1;
}
}
void IRsend::sendRaw(unsigned int buf[], int len, int hz)
{
enableIROut(hz);
for (int i = 0; i < len; i++) {
if (i & 1) {
space(buf[i]);
}
else {
mark(buf[i]);
}
}
space(0); // Just to be sure
}
// Note: first bit must be a one (start bit)
void IRsend::sendRC5(unsigned long data, int nbits)
{
enableIROut(36);
data = data << (32 - nbits);
mark(RC5_T1); // First start bit
space(RC5_T1); // Second start bit
mark(RC5_T1); // Second start bit
for (int i = 0; i < nbits; i++) {
if (data & TOPBIT) {
space(RC5_T1); // 1 is space, then mark
mark(RC5_T1);
}
else {
mark(RC5_T1);
space(RC5_T1);
}
data <<= 1;
}
space(0); // Turn off at end
}
// Caller needs to take care of flipping the toggle bit
void IRsend::sendRC6(unsigned long data, int nbits)
{
enableIROut(36);
data = data << (32 - nbits);
mark(RC6_HDR_MARK);
space(RC6_HDR_SPACE);
mark(RC6_T1); // start bit
space(RC6_T1);
int t;
for (int i = 0; i < nbits; i++) {
if (i == 3) {
// double-wide trailer bit
t = 2 * RC6_T1;
}
else {
t = RC6_T1;
}
if (data & TOPBIT) {
mark(t);
space(t);
}
else {
space(t);
mark(t);
}
data <<= 1;
}
space(0); // Turn off at end
}
/* Sharp and DISH support by Todd Treece ( http://unionbridge.org/design/ircommand )
The Dish send function needs to be repeated 4 times, and the Sharp function
has the necessary repeat built in because of the need to invert the signal.
Sharp protocol documentation:
http://www.sbprojects.com/knowledge/ir/sharp.htm
Here are the LIRC files that I found that seem to match the remote codes
from the oscilloscope:
Sharp LCD TV:
http://lirc.sourceforge.net/remotes/sharp/GA538WJSA
DISH NETWORK (echostar 301):
http://lirc.sourceforge.net/remotes/echostar/301_501_3100_5100_58xx_59xx
For the DISH codes, only send the last for characters of the hex.
i.e. use 0x1C10 instead of 0x0000000000001C10 which is listed in the
linked LIRC file.
*/
void IRsend::sendSharp(unsigned long data, int nbits) {
unsigned long invertdata = data ^ SHARP_TOGGLE_MASK;
enableIROut(38);
for (int i = 0; i < nbits; i++) {
if (data & 0x4000) {
mark(SHARP_BIT_MARK);
space(SHARP_ONE_SPACE);
}
else {
mark(SHARP_BIT_MARK);
space(SHARP_ZERO_SPACE);
}
data <<= 1;
}
mark(SHARP_BIT_MARK);
space(SHARP_ZERO_SPACE);
delay(46);
for (int i = 0; i < nbits; i++) {
if (invertdata & 0x4000) {
mark(SHARP_BIT_MARK);
space(SHARP_ONE_SPACE);
}
else {
mark(SHARP_BIT_MARK);
space(SHARP_ZERO_SPACE);
}
invertdata <<= 1;
}
mark(SHARP_BIT_MARK);
space(SHARP_ZERO_SPACE);
delay(46);
}
void IRsend::sendDISH(unsigned long data, int nbits)
{
enableIROut(56);
mark(DISH_HDR_MARK);
space(DISH_HDR_SPACE);
for (int i = 0; i < nbits; i++) {
if (data & DISH_TOP_BIT) {
mark(DISH_BIT_MARK);
space(DISH_ONE_SPACE);
}
else {
mark(DISH_BIT_MARK);
space(DISH_ZERO_SPACE);
}
data <<= 1;
}
}
void IRsend::sendPanasonic(unsigned int address, unsigned long data) {
enableIROut(35);
mark(PANASONIC_HDR_MARK);
space(PANASONIC_HDR_SPACE);
for(int i=0;i<16;i++)
{
mark(PANASONIC_BIT_MARK);
if (address & 0x8000) {
space(PANASONIC_ONE_SPACE);
} else {
space(PANASONIC_ZERO_SPACE);
}
address <<= 1;
}
for (int i=0; i < 32; i++) {
mark(PANASONIC_BIT_MARK);
if (data & TOPBIT) {
space(PANASONIC_ONE_SPACE);
} else {
space(PANASONIC_ZERO_SPACE);
}
data <<= 1;
}
mark(PANASONIC_BIT_MARK);
space(0);
}
void IRsend::sendJVC(unsigned long data, int nbits, int repeat)
{
enableIROut(38);
data = data << (32 - nbits);
if (!repeat){
mark(JVC_HDR_MARK);
space(JVC_HDR_SPACE);
}
for (int i = 0; i < nbits; i++) {
if (data & TOPBIT) {
mark(JVC_BIT_MARK);
space(JVC_ONE_SPACE);
}
else {
mark(JVC_BIT_MARK);
space(JVC_ZERO_SPACE);
}
data <<= 1;
}
mark(JVC_BIT_MARK);
space(0);
}
void IRsend::mark(int time) {
// Sends an IR mark (frequency burst output) for the specified number of microseconds.
noInterrupts();
while (time > 0) {
digitalWrite(irPin, HIGH); // this takes about 3 microseconds to happen
delayMicroseconds(burstWait);
digitalWrite(irPin, LOW); // this also takes about 3 microseconds
delayMicroseconds(burstWait);
time -= burstLength;
}
interrupts();
}
void IRsend::space(int time) {
// Sends an IR space (no output) for the specified number of microseconds.
digitalWrite(irPin, LOW); // Takes about 3 microsecondes
if (time > 3) {
delayMicroseconds(time - 3);
}
}
void IRsend::enableIROut(int khz) {
// Enables IR output. The khz value controls the modulation frequency in kilohertz.
// MAX frequency is 166khz.
pinMode(irPin, OUTPUT);
digitalWrite(irPin, LOW);
// This is the time to wait with the IR LED on and off to make the frequency, in microseconds.
// The - 3.0 at the end is because digitalWrite() takes about 3 microseconds. Info from:
// https://github.com/eflynch/sparkcoreiremitter/blob/master/ir_emitter/ir_emitter.ino
burstWait = round(1.0 / khz * 1000.0 / 2.0 - 3.0);
// This is the total time of a period, in microseconds.
burstLength = round(1.0 / khz * 1000.0);
}
/*
* IRremote
* Version 0.1 July, 2009
* Copyright 2009 Ken Shirriff
* For details, see http://arcfn.com/2009/08/multi-protocol-infrared-remote-library.htm http://arcfn.com
* Edited by Mitra to add new controller SANYO
*
* Interrupt code based on NECIRrcv by Joe Knapp
* http://www.arduino.cc/cgi-bin/yabb2/YaBB.pl?num=1210243556
* Also influenced by http://zovirl.com/2008/11/12/building-a-universal-remote-with-an-arduino/
*
* JVC and Panasonic protocol added by Kristian Lauszus (Thanks to zenwheel and other people at the original blog post)
*/
#ifndef IRremote_h
#define IRremote_h
class IRsend
{
const int irPin;
int burstWait;
int burstLength;
public:
IRsend(int irPin);
void sendNEC(unsigned long data, int nbits);
void sendSony(unsigned long data, int nbits);
// Neither Sanyo nor Mitsubishi send is implemented yet
// void sendSanyo(unsigned long data, int nbits);
// void sendMitsubishi(unsigned long data, int nbits);
void sendRaw(unsigned int buf[], int len, int hz);
void sendRC5(unsigned long data, int nbits);
void sendRC6(unsigned long data, int nbits);
void sendSharp(unsigned long data, int nbits);
void sendDISH(unsigned long data, int nbits);
void sendPanasonic(unsigned int address, unsigned long data);
void sendJVC(unsigned long data, int nbits, int repeat); // *Note instead of sending the REPEAT constant if you want the JVC repeat signal sent, send the original code value and change the repeat argument from 0 to 1. JVC protocol repeats by skipping the header NOT by sending a separate code value like NEC does.
private:
void enableIROut(int khz);
void mark(int usec);
void space(int usec);
}
;
// Constants for sending IR codes
#define NEC_HDR_MARK 9000
#define NEC_HDR_SPACE 4500
#define NEC_BIT_MARK 560
#define NEC_ONE_SPACE 1600
#define NEC_ZERO_SPACE 560
#define NEC_RPT_SPACE 2250
#define SONY_HDR_MARK 2400
#define SONY_HDR_SPACE 600
#define SONY_ONE_MARK 1200
#define SONY_ZERO_MARK 600
#define SONY_RPT_LENGTH 45000
#define SONY_DOUBLE_SPACE_USECS 500 // usually ssee 713 - not using ticks as get number wrapround
// SA 8650B
#define SANYO_HDR_MARK 3500 // seen range 3500
#define SANYO_HDR_SPACE 950 // seen 950
#define SANYO_ONE_MARK 2400 // seen 2400
#define SANYO_ZERO_MARK 700 // seen 700
#define SANYO_DOUBLE_SPACE_USECS 800 // usually ssee 713 - not using ticks as get number wrapround
#define SANYO_RPT_LENGTH 45000
// Mitsubishi RM 75501
// 14200 7 41 7 42 7 42 7 17 7 17 7 18 7 41 7 18 7 17 7 17 7 18 7 41 8 17 7 17 7 18 7 17 7
// #define MITSUBISHI_HDR_MARK 250 // seen range 3500
#define MITSUBISHI_HDR_SPACE 350 // 7*50+100
#define MITSUBISHI_ONE_MARK 1950 // 41*50-100
#define MITSUBISHI_ZERO_MARK 750 // 17*50-100
// #define MITSUBISHI_DOUBLE_SPACE_USECS 800 // usually ssee 713 - not using ticks as get number wrapround
// #define MITSUBISHI_RPT_LENGTH 45000
#define RC5_T1 889
#define RC5_RPT_LENGTH 46000
#define RC6_HDR_MARK 2666
#define RC6_HDR_SPACE 889
#define RC6_T1 444
#define RC6_RPT_LENGTH 46000
#define SHARP_BIT_MARK 245
#define SHARP_ONE_SPACE 1805
#define SHARP_ZERO_SPACE 795
#define SHARP_GAP 600000
#define SHARP_TOGGLE_MASK 0x3FF
#define SHARP_RPT_SPACE 3000
#define DISH_HDR_MARK 400
#define DISH_HDR_SPACE 6100
#define DISH_BIT_MARK 400
#define DISH_ONE_SPACE 1700
#define DISH_ZERO_SPACE 2800
#define DISH_RPT_SPACE 6200
#define DISH_TOP_BIT 0x8000
#define PANASONIC_HDR_MARK 3502
#define PANASONIC_HDR_SPACE 1750
#define PANASONIC_BIT_MARK 502
#define PANASONIC_ONE_SPACE 1244
#define PANASONIC_ZERO_SPACE 400
#define JVC_HDR_MARK 8000
#define JVC_HDR_SPACE 4000
#define JVC_BIT_MARK 600
#define JVC_ONE_SPACE 1600
#define JVC_ZERO_SPACE 550
#define JVC_RPT_LENGTH 60000
#define SHARP_BITS 15
#define DISH_BITS 16
#define TOPBIT 0x80000000
#endif



_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.