SCORBOT ER-V+ 5-dof Robot Arm Controller and Simulator DesignGreetings from Amit Kumar Nandi.
The Project was initially started as an initiative to revive an old non-working scorbot robot. The project has 2 major parts:
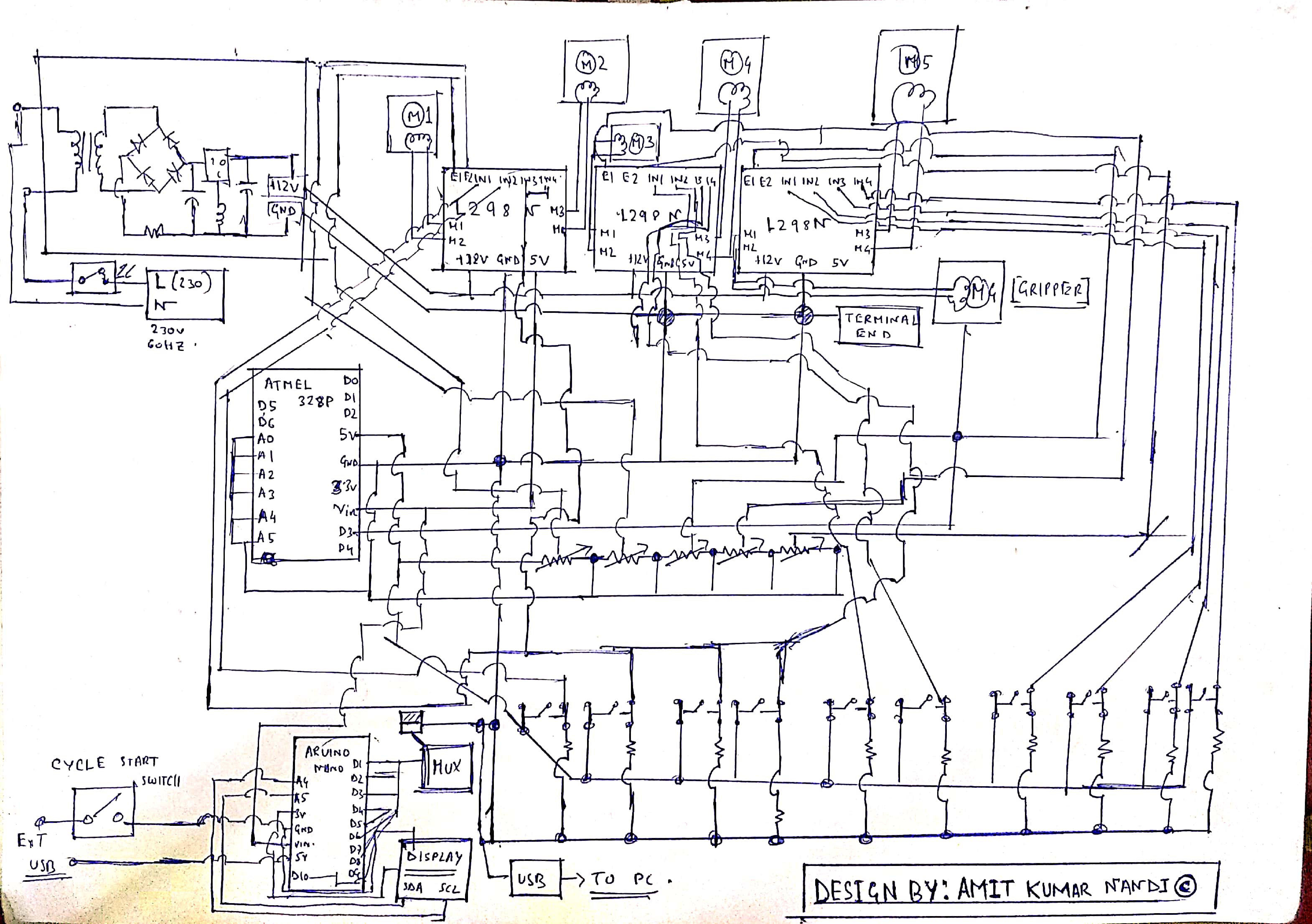
- Hardware Controller Design
- Software Simulator
Hardware is designed using PID control of position of motors for each joint from the feedback of their quadrature rotary encoders and command the motor driver to move in order to correct positional errors. Full industrial emergency interlocked control system design with diagnostic through LED and error status displayed on integrated display. Teach Pendant functionality is given and additional serial interface to program the robot from any computer is also implemented in the project. Robot configuration is 5dof + gripper and all 5 joints are rotary(5R).
Software is designed using MATLAB and ROS node in Debian. In ROS, the robot arm model is designed and all the inverse/forward kinematic equations to manipulate the robot arm in positional space is implemented using MATLAB. A custom MATLAB toolbox is designed in using C++ and kehyboard control with teach function and visualisation is implemented using MATLAB GUI library. All the software simulator code can be found at my GitHub.
For More Projects and Information please visit:
NANDI MECHATRONICS
HERE IS A WORKING DEMO OF THE PROJECT:
Enjoy!
*All pictures and videos are courtesy of :
FMS LAB, Birla Institute of Technology, Mesra
More Work at : https://aamitn.github.io






































_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.