


The purpose of this project is to create an autonomous flying hexacopter that can be controlled with an Android device using a wireless connection and TCP sockets.
Tools Required
- 1 pcs Digilent Wi-FIRE: WiFi Enabled PIC32MZ Microcontroller Board
- 1 pcs chipKIT PGM Programmer/Debugger
- 1 pcs GWS Servo Kit
- 1 pcs Flame Wheel ARF KIT
- 1 pcs 3S LiPo Battery
- 6 pcs GP2Y0A02YK0F - Infrared Proximity Sensor Long Range
- 1 pcs TTL Serial JPEG Camera
- 6 pcs 5mm LED’s
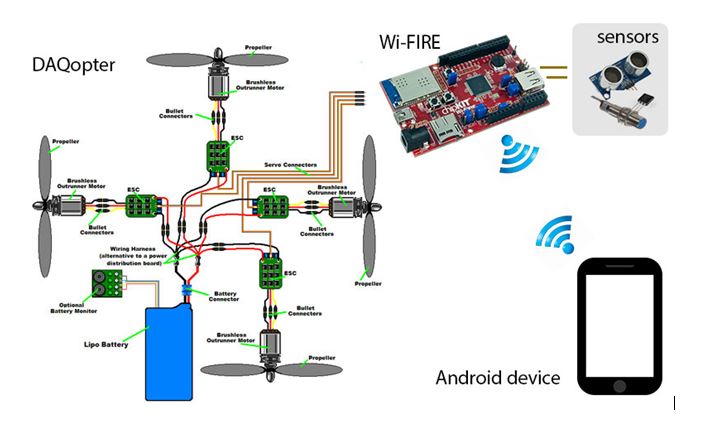
Project SummaryThe hexacopter receives a byte array from the Android device and decodes it as the values for the throttle, aileron, rudder, elevator commands need for the Naza M lite Flight controller. The controller operates the motor for the specific task needed. The Communication between the Wi-Fire and the Naza M is done using PWM servo signals.
The hexacopter has Infrared Proximity Sensors to avoid approaching objects in order to avoid a collision and damaging the device.
The object of this project is to make a device that can access places that people can’t and collect information about that place. This project can be transformed into a room scanning hexacopter that can detect persons in a fire with the front camera and avoid objects with the aid of the sensors. Could be used to scan tunnels or all sort of spaces or high altitude where a person could not go without risking their life.
Features and SpecificationsA quadcopter, also called a quadrotor helicopter or quadrotor, is a multirotor helicopter that is lifted and propelled by four rotors. Quadcopters are classified as rotorcraft, as opposed to fixed-wing aircraft, because their lift is generated by a set of rotors (vertically oriented propellers).
Unlike most helicopters, quadcopters use two sets of identical fixed pitched propellers; two clockwise (CW) and two counter-clockwise (CCW). These use a variation of RPM to control lift and torque. Control of vehicle motion is achieved by altering the rotation rate of one or more rotor discs, thereby changing its torque load and thrust/lift characteristics.
Early in the history of flight, quadcopter (referred to as 'quadrotor') configurations were seen as possible solutions to some of the persistent problems in vertical flight; torque-induced control issues (as well as efficiency issues originating from the tail rotor, which generates no useful lift) can be eliminated by counter-rotation and the relatively short blades are much easier to construct. A number of manned designs appeared in the 1920s and 1930s. These vehicles were among the first successful heavier-than-air vertical take-off and landing (VTOL) vehicles. However, early prototypes suffered from poor performance, and latter prototypes required too much pilot workload, due to poor stability augmentation and limited control authority.
More recently quadcopter designs have become popular in unmanned aerial vehicle (UAV) research. These vehicles use an electronic control system and electronic sensors to stabilize the aircraft. With their small size and agile maneuverability, these quadcopters can be flown indoors as well as outdoors.
There are several advantages to quadcopters over comparably-scaled helicopters. First, quadcopters do not require mechanical linkages to vary the rotor blade pitch angle as they spin. This simplifies the design and maintenance of the vehicle. Second, the use of four rotors allows each individual rotor to have a smaller diameter than the equivalent helicopter rotor, allowing them to possess less kinetic energy during flight. This reduces the damage caused should the rotors hit anything. For small-scale UAVs, this makes the vehicles safer for close interaction. Some small-scale quadcopters have frames that enclose the rotors, permitting flights through more challenging environments, with a lower risk of damaging the vehicle or its surroundings.
The hexacopter receives a byte array from the Android device and decodes it as the values for the throttle, aileron, rudder, elevator commands need for the Naza M lite Flight controller. The controller operates the motor for the specific task needed. The Communication between the Wi-Fire and the Naza M is done using PWM servo signals.
The hexacopter has Infrared Proximity Sensors to avoid approaching objects in order to avoid a collision and damaging the device.
The object of this project is to make a device that can access places that people can’t and collect information about that place. This project can be transformed into a room scanning hexacopter that can detect persons in a fire with the front camera and avoid objects with the aid of the sensors. Could be used to scan tunnels or all sort of spaces or high altitude where a person could not go without risking their life.
Angelo Pop & Blosenco Iuri
 Alex Wong
Alex Wong




{kind=link}
Comments
Please log in or sign up to comment.