



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 3 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
I built a Motion-sensing faucet system that takes a hot and cold water supply and it combines them to output the temperature set by the user when the user places their hands below the faucet. The desired temperature can be set either via the touch buttons on the OPLA or through the cloud.
Some of the challenges were:
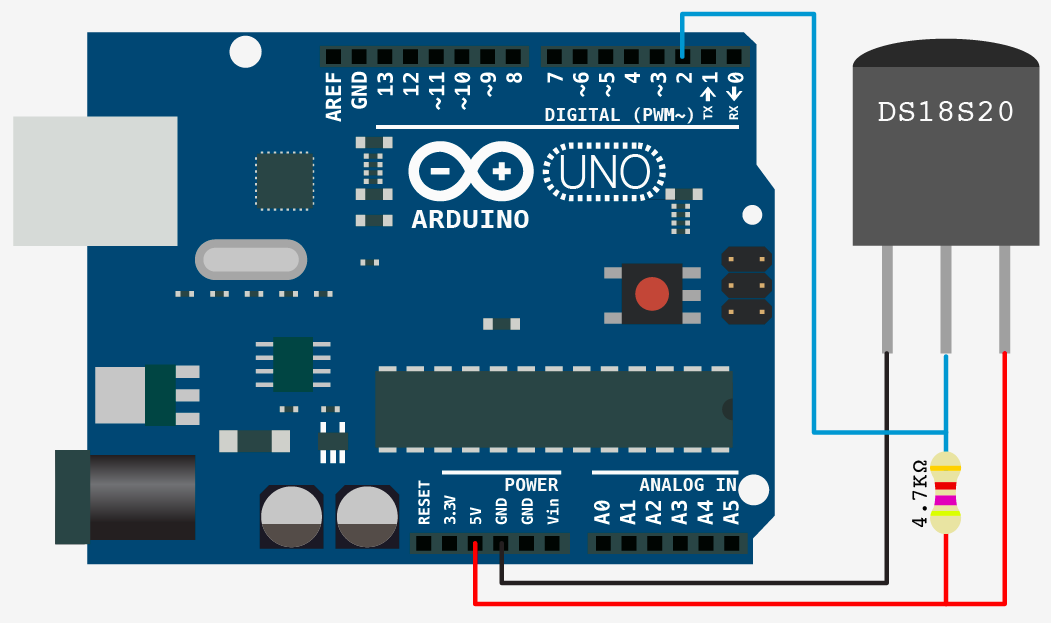
One, the temperature sensor's response time proved to be too slow and hence it lagged behind the actual water temperature.
The sensor problem was over come by using a complementary filter to fuse the sensor's temperature reading with a theoretical prediction derived from the percentage of hot and cold water being let in by the motor-driven valves.
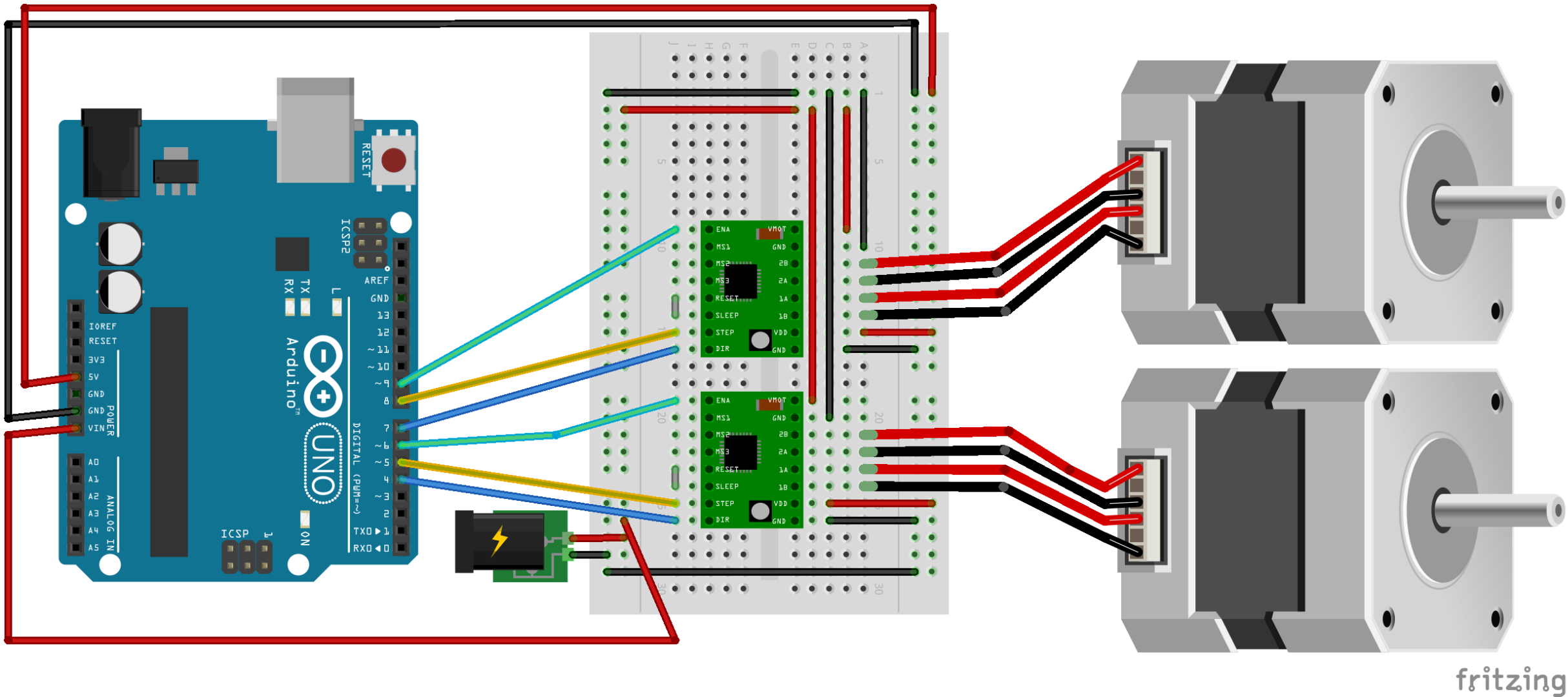
Two, the valves used are plastic and are prone to breakage if the motor shaft overrun the taps. But, I couldn't use 4 limit switches (One each for min and max positions for the 2 valves), since I had only 2 digital pins available for the switches.
I had to work with just 2 limit switches to identify when the maximum and minimum positions were reached. It was a challenge but I managed to get it work efficiently with the help of some extra code work
I also wanted to use the display feature on the Opla to make it more user friendly. But it turned out that I needed to disable the display to have enough pins to operate the stepper. Operating the stepper motors on a different controller to leave the display free is the next step for this project. Below is the video of the implementation of my temperature display feature.








_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.