


Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
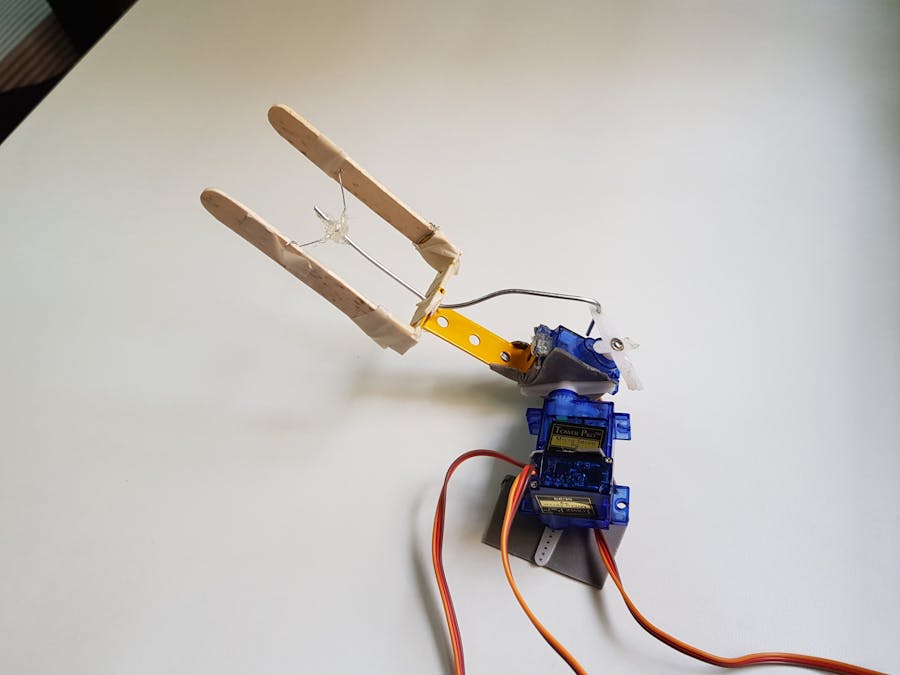
You must have seen wonderful 3D printed arms that cut paper, draw portraits and play tic tac toe all around the Arduino Community. Well, I tried to see how far I could get using just scarp materials like ice cream sticks.
The claws got twisted because I tried to make them lift heavy objects :)
Let me walk you through the steps..
Step 1: Creating the ClawTake 2 ice cream sticks (or something of that sort) and connect them with a thin wire. In the centre of the thin wire, hot glue a metal rod. This rod will move forward and backward, causing the ice cream sticks to open and close. You'll want to use a stiff rod because a thread or light wire won't generate a "pushing" effect required to open the claw. Now, join the ends of the ice cream sticks with a rigid support ( I used a toy metal piece).
Step 2: Attaching a Servo Motor to the clawConnect the base of the servo to the metal piece. Then, insert the metal rod through the holes of the servo's horns. I had to hammer a nail through a hole to make it big enough to fit the thick wire.
Step 3: Assembling the base Servo MotorsCombine 2 Servos in the manner illustrated above. The motor on the right rotates the entire arm to different positions, while the other is used for lowering and raising the claw.
Step 4: Final StructureYou're almost there. Attach the servos together and the rightmost motor's horns firmly to the ground as shown. Double sided tapes come real handy here.
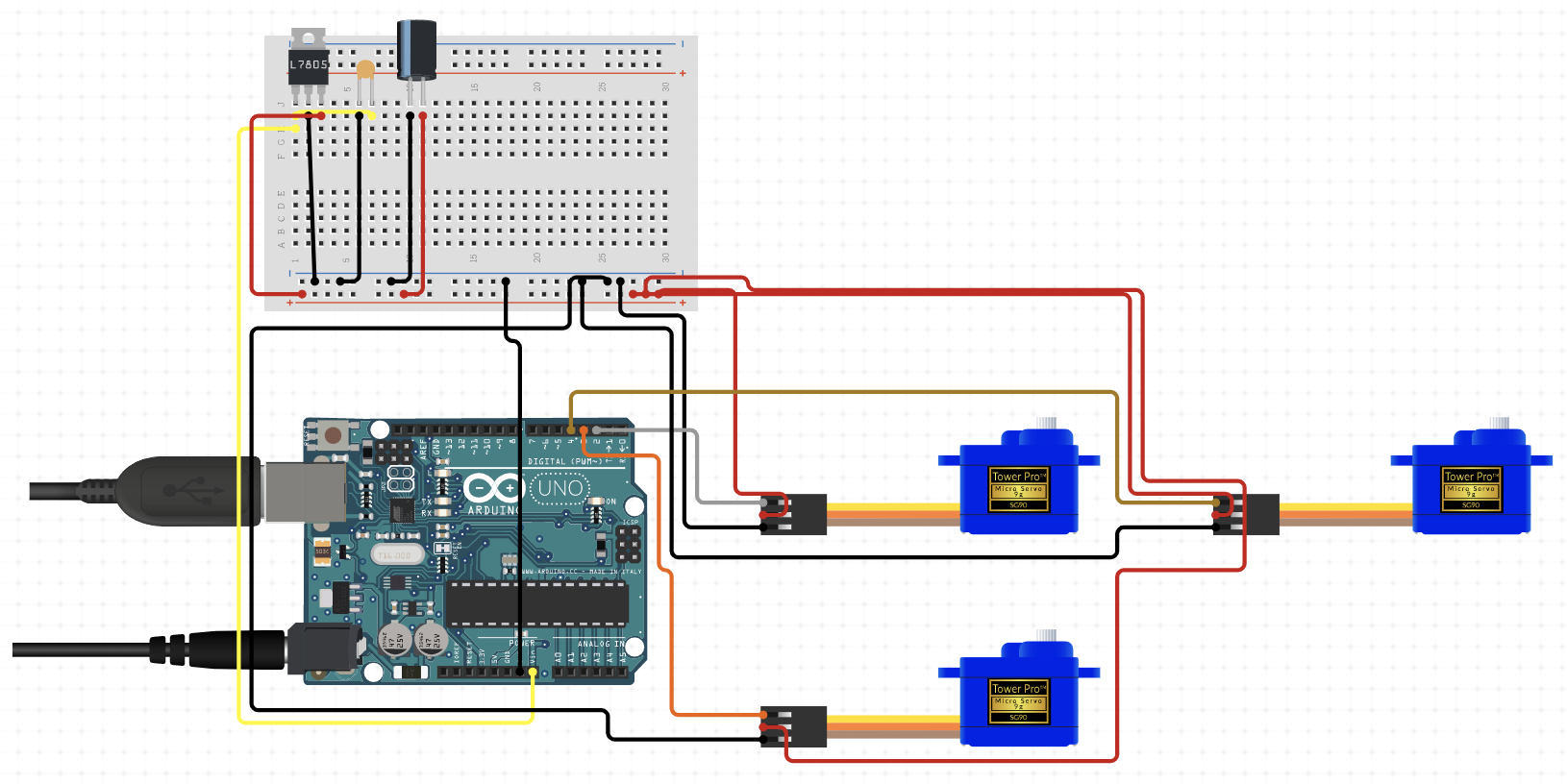
Step 5: Attach Pins and CodeBefore you begin programming, you should know that I've pre-coded the claw to move to specific positions and pick up objects. It doesn't have the ability to locate the positions of items. Perhaps you could make a more advanced version of my project by including a handful of Sonar Sensors that detect the presence of objects, enabling the arm to move accordingly.
Thanks for reading and good luck!





{kind=link}
Comments
Please log in or sign up to comment.