


Hardware components | ||||||
| × | 1 | ||||
Software apps and online services | ||||||
| ||||||
| ||||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
BEAT THE HEAT (PlutoX)
Objectives
● Working of IR Flame Sensor
● Using environmental changes in developing a feature
Problem statement
By making changes in the atmospheric temperature in the drone’s surroundings observe the reading from the IR Flame sensor and make the drone maneuver one position to another.
Explanation
After understanding the working of Different types of sensor and their purpose in drones, the next step is to understand the working and purpose of the next sensor, IR Flame Sensor.
IR Flame Sensor (LM393 Module)
A flame detector is a sensor designed to detect and respond to the presence of a flame or fire. Responses to a detected flame depend on the installation, but can include sounding an alarm, deactivating a fuel line (such as a propane or a natural gas line), and activating a fire suppression system.There are different types of flame detection methods. Some of them are: Ultraviolet detector, near IR array detector, infrared (IR) detector, Infrared thermal cameras, UV/IR detector etc.
Working of IR Flame sensor in the Drone
In this project we are using an IR based flame sensor.When fire burns it emits a small amount of Infra-red light, this light will be received by the Photodiode (IR receiver) on the sensor module. When the fire is detected by a sensor it sends the signal to Prismus X and the drone changes its position.
Working Principle
Flame detectors comprise an electronic circuit with an electromagnetic radiation receiver. They are activated when they receive electromagnetic radiation from one or more defined wave lengths according to their design in the UV or infrared spectrum.
Approaching the problem
The project aims at commanding Pluto X to change its position when the IR Flame sensor detects any kind of temperature or heat surrounding, avoid the heat and take the drone to a certain distance. The first step is to create a considerable change in the atmospheric temperature, then check it on the Pluto monitor. Carefully look at the value provided by the Flame sensor.
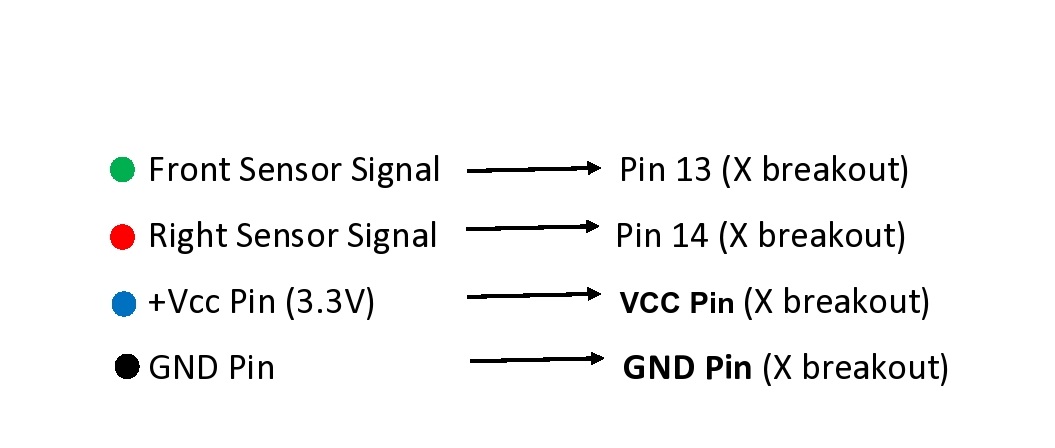
Connection Diagram
This section is for information X-Breakout Rev 2. X-Breakout is designed to expose basic communication ports and prototyping.
Features
- 5V boost converter to interface 5V sensors. Current sourcing 200mA. (Optional)
- Current rating of the UniBus pins in 300mA.
- 4Mb SPI Flash for data logging. (Optional)
- General purpose pins for prototyping.
- The following ports are available:
- 2 x PWM for servo (3.7V or 5V)
- 1 x UART
- 1 x SPI
- 1 x I2C
- 1 x ADC
PCB files
Sch
Tutorials- Adding analog sensor
- Adding I2C sensor
- Adding SPI sensor
- Adding UART sensor
- Adding a servo
- Using Dataflash
- Prototyping using Breakout
- Sensor LM393 send the data to primusX if any kind of flame or heat detected in atmosphere
- Primus measures the front sensor value if it is below a certain value (600) than it set RC command to lower for PITCH the drone to backward.
- same as for the left sensor if the value of the sensor is below a certain amount (600) than the drone ROLL towards the left direction
● Build the code
● Flash the code on PlutoX
● Turn the Developer mode ON and connect Cygnus to PlutoX as well.
● Light up the Flame near PlutoX and carefully check the data on the Pluto monitor.
● Check the values which are sent by IR flame sensor.
● Note the difference in data initial data and when flame is light up.





{kind=link}
Comments
Please log in or sign up to comment.