OVERVIEW:This project aims to grasp the fundamentals of ROS1, understanding the workings of publishers and subscribers. Although the line follower isn't exceptionally fast, it serves as a practical example of utilizing rosserial on an Arduino board. To do this project, a foundational understanding of ROS is necessary, including concepts such as creating workspaces, packages, and scripts.
WORKING:The Arduino gathers data from the IR sensors (e.g., 0000, 10000, etc.) and publishes it to the ROS node. The ROS node subscribes to this data and executes a script. Based on the received IR sensor data, the script issues commands to the line follower (e.g., forward, right, stop). The Arduino subscribes to these commands and changes the line follower's movements accordingly.
STEPS:1] Create a Workspace.
2] Create a package inside the src folder of your workspace
3] Create a script folder inside src folder of your package
4] Copy paste the script which I attached (in code section) and save it
5] Then catkin_make your workspace
after doing these steps, follow the "line_follower_steps.txt" file attached in downloads section.
and you are done!!
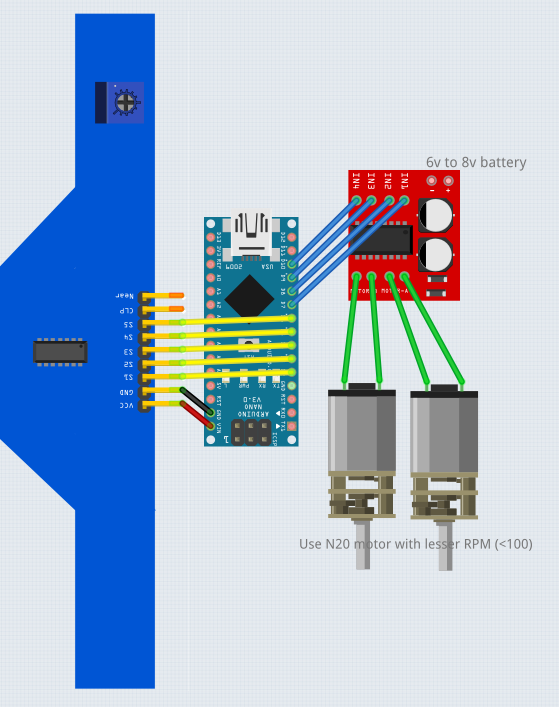
PHOTOS:
WORKING VIDEO: 














{kind=link}
Comments
Please log in or sign up to comment.