



Hardware components | ||||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 2 | ||||
| × | 1 | ||||
| × | 1 | ||||
Hand tools and fabrication machines | ||||||
 |
| |||||
 |
| |||||
 |
| |||||
| ||||||
In last few months we had seen so many smart sanitizers like touch free, foot operated and etc. These are all smart and useful for people (TYPE1) who actually use. But still there are people (TYPE2) I have seen in ATM/ Shops who avoids sanitizers before entering into shops or ATM's.
This idea has sparked from there, I want to put restriction for such people (TYPE2) who avoid using sanitizer in public places. The base idea of this project is "If you don't clean your hands with sanitizer you cannot enter inside the door".
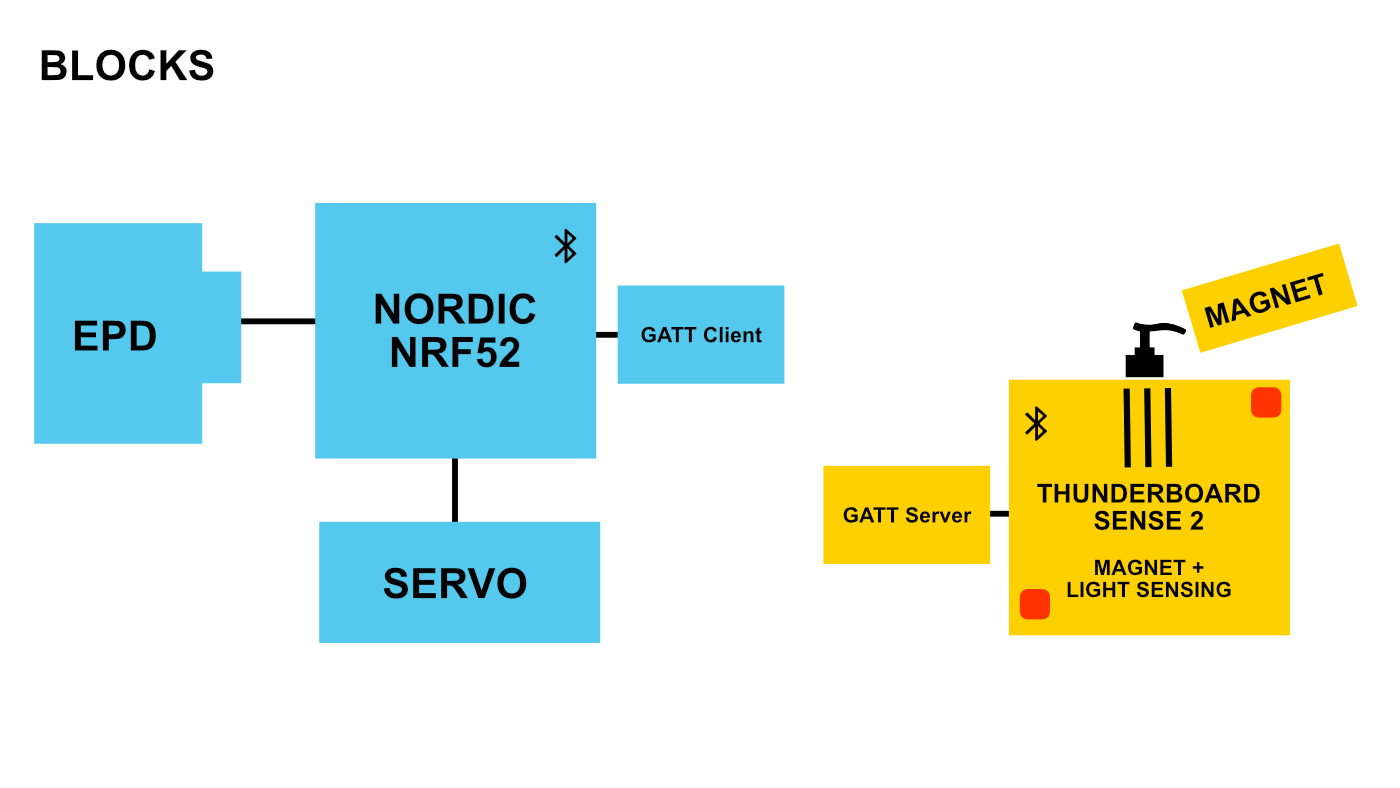
Design:This project contains two part, Sanitizer Bottle and Door Setup. The bottle is designed with Silabs Thunderboard Sense 2 board. It deducts the sanitizer level and sensing the spray press with magnetic sensor. The GATT server is implemented on the EFR32. Simplicity studio is used for coding and debugging.
Note: Sanitizer wont conduct electricity, due to this the level demonstration is done with water but in actual design we will have float bubbles to detect the water level.
The Permanent Magnet is fixed on the CAP like below with glue support.
The next part is designing the Door System. I have taken some paper boxes and added Servo motor in it for open close operation. Could not find anything better solution due to current panic situation, just used what I had at home.
Attached the Nordic NRF52 Dev kit into the door setup along with the EPD (Eink Paper Display). EPD is monochrome etc display from PervasiveDisplays
Implemented the BLE client profile on NRF52 kit, created SPI interface for EPD then PWM for Servo (P0_27). Used Segger Embedded studio for development.
SPI Interface with EPD PINS:
EINK_MOSI P1.13
EINK_MISO P1.14
EINK_SCLK P1.15
EINK_DISPCS P1.12
EINK_DISPRST P1.03
EINK_DISPBUSY P1.04
EINK_DISPEN P1.05The NRF52 client receives the notification from the Thuderboard and controls the Servo and Updates the status in EDP. The EDP UI has graphics of Lock/Unlock and Sanitizer bottle level. The eTC based EPD's are sensitive to the sunlight due to this screen is faded, not recommended to operate in sunlight.
Finally the demo works as expected, when users presses the sanitizer cap, the door opens and closes after the timeout period. In reality it could be simple unlock system. And the sensor (Thunder-board) part can be fit into the bottle spray CAP. Permanent magnet will be fit inside the axis where the it moves up and down. The ambient sensor detects the hands position to avoid people (TYPE3) hacks. This setup can be connected to network where we can monitor from cloud
3DDesign Concept:
1) ATM access (with or without door)
2) Mail/letter box
3) Shops Entry Doors (Automatic & Manuel )
4) Ticket Printing Machine
5) Vending Machine
6) Public Toilet & Gym etc
The working video is here:
/**
* Copyright (c) 2014 - 2019, Nordic Semiconductor ASA
*
* All rights reserved.
*
* Redistribution and use in source and binary forms, with or without modification,
* are permitted provided that the following conditions are met:
*
* 1. Redistributions of source code must retain the above copyright notice, this
* list of conditions and the following disclaimer.
*
* 2. Redistributions in binary form, except as embedded into a Nordic
* Semiconductor ASA integrated circuit in a product or a software update for
* such product, must reproduce the above copyright notice, this list of
* conditions and the following disclaimer in the documentation and/or other
* materials provided with the distribution.
*
* 3. Neither the name of Nordic Semiconductor ASA nor the names of its
* contributors may be used to endorse or promote products derived from this
* software without specific prior written permission.
*
* 4. This software, with or without modification, must only be used with a
* Nordic Semiconductor ASA integrated circuit.
*
* 5. Any software provided in binary form under this license must not be reverse
* engineered, decompiled, modified and/or disassembled.
*
* THIS SOFTWARE IS PROVIDED BY NORDIC SEMICONDUCTOR ASA "AS IS" AND ANY EXPRESS
* OR IMPLIED WARRANTIES, INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTIES
* OF MERCHANTABILITY, NONINFRINGEMENT, AND FITNESS FOR A PARTICULAR PURPOSE ARE
* DISCLAIMED. IN NO EVENT SHALL NORDIC SEMICONDUCTOR ASA OR CONTRIBUTORS BE
* LIABLE FOR ANY DIRECT, INDIRECT, INCIDENTAL, SPECIAL, EXEMPLARY, OR
* CONSEQUENTIAL DAMAGES (INCLUDING, BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE
* GOODS OR SERVICES; LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION)
* HOWEVER CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
* LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN ANY WAY OUT
* OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE POSSIBILITY OF SUCH DAMAGE.
*
*/
/**
* @brief BLE LED Button Service central and client application main file.
*
* This file contains the source code for a sample client application using the LED Button service.
*/
#include <stdint.h>
#include <stdio.h>
#include <string.h>
#include "nordic_common.h"
#include "nrf.h"
#include "nrf_sdh.h"
#include "nrf_sdh_ble.h"
#include "nrf_sdh_soc.h"
#include "nrf_pwr_mgmt.h"
#include "app_timer.h"
#include "nrf_delay.h"
#include "app_pwm.h"
#include "boards.h"
#include "bsp.h"
#include "bsp_btn_ble.h"
#include "ble.h"
#include "ble_hci.h"
#include "ble_advertising.h"
#include "ble_conn_params.h"
#include "ble_db_discovery.h"
#include "ble_lbs_c.h"
#include "nrf_ble_gatt.h"
#include "nrf_ble_scan.h"
#include "nrf_log.h"
#include "nrf_log_ctrl.h"
#include "nrf_log_default_backends.h"
#include "timer.h"
#include "nrf_drv_systick.h"
#include "epd_lib/eink_nrf_interface.h"
#include "epd_lib/eink_library.h"
#include "images.h"
#define CENTRAL_SCANNING_LED BSP_BOARD_LED_0 /**< Scanning LED will be on when the device is scanning. */
#define CENTRAL_CONNECTED_LED BSP_BOARD_LED_1 /**< Connected LED will be on when the device is connected. */
#define LEDBUTTON_LED BSP_BOARD_LED_2 /**< LED to indicate a change of state of the the Button characteristic on the peer. */
#define LEDLEVEL_LED BSP_BOARD_LED_3 /**< LED to indicate a change of state of the the Button characteristic on the peer. */
#define SCAN_INTERVAL 0x00A0 /**< Determines scan interval in units of 0.625 millisecond. */
#define SCAN_WINDOW 0x0050 /**< Determines scan window in units of 0.625 millisecond. */
#define SCAN_DURATION 0x0000 /**< Timout when scanning. 0x0000 disables timeout. */
#define MIN_CONNECTION_INTERVAL MSEC_TO_UNITS(7.5, UNIT_1_25_MS) /**< Determines minimum connection interval in milliseconds. */
#define MAX_CONNECTION_INTERVAL MSEC_TO_UNITS(30, UNIT_1_25_MS) /**< Determines maximum connection interval in milliseconds. */
#define SLAVE_LATENCY 0 /**< Determines slave latency in terms of connection events. */
#define SUPERVISION_TIMEOUT MSEC_TO_UNITS(4000, UNIT_10_MS) /**< Determines supervision time-out in units of 10 milliseconds. */
#define LEDBUTTON_BUTTON_PIN BSP_BUTTON_0 /**< Button that will write to the LED characteristic of the peer */
#define BUTTON_DETECTION_DELAY APP_TIMER_TICKS(50) /**< Delay from a GPIOTE event until a button is reported as pushed (in number of timer ticks). */
#define APP_BLE_CONN_CFG_TAG 1 /**< A tag identifying the SoftDevice BLE configuration. */
#define APP_BLE_OBSERVER_PRIO 3 /**< Application's BLE observer priority. You shouldn't need to modify this value. */
/***************PWM*****************/
static uint16_t const m_servo_max = 1280*2;
static uint16_t const m_servo_min = 560*2;
static uint16_t const m_servostep = 40;
static uint32_t servo_cur_value = m_servo_min;
static uint32_t servo_dsr_value = m_servo_min;
static uint8_t m_used = 0;
APP_PWM_INSTANCE(PWM1,1); // Create the instance "PWM1" using TIMER1.
static volatile bool ready_flag; // A flag indicating PWM status.
NRF_BLE_SCAN_DEF(m_scan); /**< Scanning module instance. */
BLE_LBS_C_DEF(m_ble_lbs_c); /**< Main structure used by the LBS client module. */
NRF_BLE_GATT_DEF(m_gatt); /**< GATT module instance. */
BLE_DB_DISCOVERY_DEF(m_db_disc); /**< DB discovery module instance. */
NRF_BLE_GQ_DEF(m_ble_gatt_queue, /**< BLE GATT Queue instance. */
NRF_SDH_BLE_CENTRAL_LINK_COUNT,
NRF_BLE_GQ_QUEUE_SIZE);
static char const m_target_periph_name[] = "Thunderboard #04729";// "Nordic_Blinky"; /**< Name of the device we try to connect to. This name is searched in the scan report data*/
static uint8_t door_status =0;
static uint8_t sani_level, psani_level =0;
static uint8_t ui_update = 0;
uint8_t white[5808]={0};
uint8_t frame_buf[5808]={0};
/**@brief Function to handle asserts in the SoftDevice.
*
* @details This function will be called in case of an assert in the SoftDevice.
*
* @warning This handler is an example only and does not fit a final product. You need to analyze
* how your product is supposed to react in case of Assert.
* @warning On assert from the SoftDevice, the system can only recover on reset.
*
* @param[in] line_num Line number of the failing ASSERT call.
* @param[in] p_file_name File name of the failing ASSERT call.
*/
void assert_nrf_callback(uint16_t line_num, const uint8_t * p_file_name)
{
app_error_handler(0xDEADBEEF, line_num, p_file_name);
}
/**@brief Function for handling the LED Button Service client errors.
*
* @param[in] nrf_error Error code containing information about what went wrong.
*/
static void lbs_error_handler(uint32_t nrf_error)
{
APP_ERROR_HANDLER(nrf_error);
}
/**@brief Function for the LEDs initialization.
*
* @details Initializes all LEDs used by the application.
*/
static void leds_init(void)
{
bsp_board_init(BSP_INIT_LEDS);
}
static void epd_update(uint8_t door_status, uint8_t level)
{
uint32_t index=0;
uint32_t length=0;
length = sizeof(Img_noesc_demo_start_176x264);
memcpy(&frame_buf[index],Img_noesc_demo_start_176x264,length);
if(door_status)
{
index += length;
length = sizeof(Img_noesc_demo_do_176x264);
memcpy(&frame_buf[index],Img_noesc_demo_do_176x264,length);
}
else{
index += length;
length = sizeof(Img_noesc_demo_dc_176x264);
memcpy(&frame_buf[index],Img_noesc_demo_dc_176x264,length);
}
index += length;
length = sizeof(Img_noesc_demo_mid_176x264);
memcpy(&frame_buf[index],Img_noesc_demo_mid_176x264,length);
if(level == 2)
{
index += length;
length = sizeof(Img_noesc_demo_sf_176x264);
memcpy(&frame_buf[index],Img_noesc_demo_sf_176x264,length);
}
else if(level == 1)
{
index += length;
length = sizeof(Img_noesc_demo_sm_176x264);
memcpy(&frame_buf[index],Img_noesc_demo_sm_176x264,length);
}
else
{
index += length;
length = sizeof(Img_noesc_demo_sl_176x264);
memcpy(&frame_buf[index],Img_noesc_demo_sl_176x264,length);
}
index += length;
length = sizeof(Img_noesc_demo_end_176x264);
memcpy(&frame_buf[index],Img_noesc_demo_end_176x264,length);
EINK_ShowFrame(white,frame_buf,CY_EINK_FULL_4STAGE,true);
}
#if 0
static void pwmhandler()
{
if (event_type == NRF_DRV_PWM_EVT_FINISHED)
{
if(servo_cur_value > servo_dsr_value)
{
servo_cur_value = servo_cur_value - m_servostep;
if(servo_cur_value < m_servo_min) servo_cur_value = m_servo_min;
p_channels[0] = servo_cur_value;
}
else if(servo_cur_value < servo_dsr_value)
{
servo_cur_value = servo_cur_value + m_servostep;
if(servo_cur_value > m_servo_max) servo_cur_value = m_servo_max;
p_channels[0] = servo_cur_value;
}
}
}
#endif
void pwm_ready_callback(uint32_t pwm_id) // PWM callback function
{
ready_flag = true;
}
static void pwminit(void)
{
ret_code_t err_code;
/* 1-channel PWM, 200Hz, output on DK LED pins. */
app_pwm_config_t pwm1_cfg = APP_PWM_DEFAULT_CONFIG_1CH(20000L, SER_APP_SPIM0_SCK_PIN);
/* Switch the polarity of the channel. */
pwm1_cfg.pin_polarity[0] = APP_PWM_POLARITY_ACTIVE_HIGH;
/* Initialize and enable PWM. */
err_code = app_pwm_init(&PWM1,&pwm1_cfg,pwm_ready_callback);
APP_ERROR_CHECK(err_code);
app_pwm_enable(&PWM1);
app_pwm_channel_duty_ticks_set(&PWM1,0,m_servo_min);
}
/**@brief Function to start scanning.
*/
static void scan_start(void)
{
ret_code_t err_code;
err_code = nrf_ble_scan_start(&m_scan);
APP_ERROR_CHECK(err_code);
bsp_board_led_off(CENTRAL_CONNECTED_LED);
bsp_board_led_on(CENTRAL_SCANNING_LED);
}
/**@brief Handles events coming from the LED Button central module.
*/
static void lbs_c_evt_handler(ble_lbs_c_t * p_lbs_c, ble_lbs_c_evt_t * p_lbs_c_evt)
{
switch (p_lbs_c_evt->evt_type)
{
case BLE_LBS_C_EVT_DISCOVERY_COMPLETE:
{
ret_code_t err_code;
err_code = ble_lbs_c_handles_assign(&m_ble_lbs_c,
p_lbs_c_evt->conn_handle,
&p_lbs_c_evt->params.peer_db);
NRF_LOG_INFO("LED Button service discovered on conn_handle 0x%x.", p_lbs_c_evt->conn_handle);
err_code = app_button_enable();
APP_ERROR_CHECK(err_code);
// LED Button service discovered. Enable notification of Button.
err_code = ble_lbs_c_button_notif_enable(p_lbs_c);
APP_ERROR_CHECK(err_code);
} break; // BLE_LBS_C_EVT_DISCOVERY_COMPLETE
case BLE_LBS_C_EVT_BUTTON_NOTIFICATION:
{
NRF_LOG_INFO("Button state changed on peer to 0x%x.", p_lbs_c_evt->params.button.button_state);
if (p_lbs_c_evt->params.button.button_state == 0)
{
bsp_board_led_off(LEDBUTTON_LED); // Servo Action
// servo_dsr_value = m_servo_min; /* Close */
door_status = 1;
app_pwm_channel_duty_ticks_set(&PWM1,0,m_servo_max);
// bsp_board_led_on(LEDBUTTON_LED);
// door_status = 0;
}
// epd_update(door_status,p_lbs_c_evt->params.button.tank_level);
if (p_lbs_c_evt->params.button.tank_level==0)
{
bsp_board_led_on(LEDLEVEL_LED);
}
else
{
bsp_board_led_off(LEDLEVEL_LED);
}
sani_level = p_lbs_c_evt->params.button.tank_level;
} break; // BLE_LBS_C_EVT_BUTTON_NOTIFICATION
default:
// No implementation needed.
break;
}
}
/**@brief Function for handling BLE events.
*
* @param[in] p_ble_evt Bluetooth stack event.
* @param[in] p_context Unused.
*/
static void ble_evt_handler(ble_evt_t const * p_ble_evt, void * p_context)
{
ret_code_t err_code;
// For readability.
ble_gap_evt_t const * p_gap_evt = &p_ble_evt->evt.gap_evt;
switch (p_ble_evt->header.evt_id)
{
// Upon connection, check which peripheral has connected (HR or RSC), initiate DB
// discovery, update LEDs status and resume scanning if necessary. */
case BLE_GAP_EVT_CONNECTED:
{
NRF_LOG_INFO("Connected.");
err_code = ble_lbs_c_handles_assign(&m_ble_lbs_c, p_gap_evt->conn_handle, NULL);
APP_ERROR_CHECK(err_code);
err_code = ble_db_discovery_start(&m_db_disc, p_gap_evt->conn_handle);
APP_ERROR_CHECK(err_code);
// Update LEDs status, and check if we should be looking for more
// peripherals to connect to.
bsp_board_led_on(CENTRAL_CONNECTED_LED);
bsp_board_led_off(CENTRAL_SCANNING_LED);
} break;
// Upon disconnection, reset the connection handle of the peer which disconnected, update
// the LEDs status and start scanning again.
case BLE_GAP_EVT_DISCONNECTED:
{
NRF_LOG_INFO("Disconnected.");
scan_start();
} break;
case BLE_GAP_EVT_TIMEOUT:
{
// We have not specified a timeout for scanning, so only connection attemps can timeout.
if (p_gap_evt->params.timeout.src == BLE_GAP_TIMEOUT_SRC_CONN)
{
NRF_LOG_DEBUG("Connection request timed out.");
}
} break;
case BLE_GAP_EVT_CONN_PARAM_UPDATE_REQUEST:
{
// Accept parameters requested by peer.
err_code = sd_ble_gap_conn_param_update(p_gap_evt->conn_handle,
&p_gap_evt->params.conn_param_update_request.conn_params);
APP_ERROR_CHECK(err_code);
} break;
case BLE_GAP_EVT_PHY_UPDATE_REQUEST:
{
NRF_LOG_DEBUG("PHY update request.");
ble_gap_phys_t const phys =
{
.rx_phys = BLE_GAP_PHY_AUTO,
.tx_phys = BLE_GAP_PHY_AUTO,
};
err_code = sd_ble_gap_phy_update(p_ble_evt->evt.gap_evt.conn_handle, &phys);
APP_ERROR_CHECK(err_code);
} break;
case BLE_GATTC_EVT_TIMEOUT:
{
// Disconnect on GATT Client timeout event.
NRF_LOG_DEBUG("GATT Client Timeout.");
err_code = sd_ble_gap_disconnect(p_ble_evt->evt.gattc_evt.conn_handle,
BLE_HCI_REMOTE_USER_TERMINATED_CONNECTION);
APP_ERROR_CHECK(err_code);
} break;
case BLE_GATTS_EVT_TIMEOUT:
{
// Disconnect on GATT Server timeout event.
NRF_LOG_DEBUG("GATT Server Timeout.");
err_code = sd_ble_gap_disconnect(p_ble_evt->evt.gatts_evt.conn_handle,
BLE_HCI_REMOTE_USER_TERMINATED_CONNECTION);
APP_ERROR_CHECK(err_code);
} break;
default:
// No implementation needed.
break;
}
}
/**@brief LED Button client initialization.
*/
static void lbs_c_init(void)
{
ret_code_t err_code;
ble_lbs_c_init_t lbs_c_init_obj;
lbs_c_init_obj.evt_handler = lbs_c_evt_handler;
lbs_c_init_obj.p_gatt_queue = &m_ble_gatt_queue;
lbs_c_init_obj.error_handler = lbs_error_handler;
err_code = ble_lbs_c_init(&m_ble_lbs_c, &lbs_c_init_obj);
APP_ERROR_CHECK(err_code);
}
/**@brief Function for initializing the BLE stack.
*
* @details Initializes the SoftDevice and the BLE event interrupts.
*/
static void ble_stack_init(void)
{
ret_code_t err_code;
err_code = nrf_sdh_enable_request();
APP_ERROR_CHECK(err_code);
// Configure the BLE stack using the default settings.
// Fetch the start address of the application RAM.
uint32_t ram_start = 0;
err_code = nrf_sdh_ble_default_cfg_set(APP_BLE_CONN_CFG_TAG, &ram_start);
APP_ERROR_CHECK(err_code);
// Enable BLE stack.
err_code = nrf_sdh_ble_enable(&ram_start);
APP_ERROR_CHECK(err_code);
// Register a handler for BLE events.
NRF_SDH_BLE_OBSERVER(m_ble_observer, APP_BLE_OBSERVER_PRIO, ble_evt_handler, NULL);
}
/**@brief Function for handling events from the button handler module.
*
* @param[in] pin_no The pin that the event applies to.
* @param[in] button_action The button action (press/release).
*/
static void button_event_handler(uint8_t pin_no, uint8_t button_action)
{
ret_code_t err_code;
switch (pin_no)
{
case LEDBUTTON_BUTTON_PIN:
err_code = ble_lbs_led_status_send(&m_ble_lbs_c, button_action);
if (err_code != NRF_SUCCESS &&
err_code != BLE_ERROR_INVALID_CONN_HANDLE &&
err_code != NRF_ERROR_INVALID_STATE)
{
APP_ERROR_CHECK(err_code);
}
if (err_code == NRF_SUCCESS)
{
NRF_LOG_INFO("LBS write LED state %d", button_action);
}
break;
default:
APP_ERROR_HANDLER(pin_no);
break;
}
}
/**@brief Function for handling Scaning events.
*
* @param[in] p_scan_evt Scanning event.
*/
static void scan_evt_handler(scan_evt_t const * p_scan_evt)
{
ret_code_t err_code;
switch(p_scan_evt->scan_evt_id)
{
case NRF_BLE_SCAN_EVT_CONNECTING_ERROR:
err_code = p_scan_evt->params.connecting_err.err_code;
APP_ERROR_CHECK(err_code);
break;
default:
break;
}
}
/**@brief Function for initializing the button handler module.
*/
static void buttons_init(void)
{
ret_code_t err_code;
//The array must be static because a pointer to it will be saved in the button handler module.
static app_button_cfg_t buttons[] =
{
{LEDBUTTON_BUTTON_PIN, false, BUTTON_PULL, button_event_handler}
};
err_code = app_button_init(buttons, ARRAY_SIZE(buttons),
BUTTON_DETECTION_DELAY);
APP_ERROR_CHECK(err_code);
}
/**@brief Function for handling database discovery events.
*
* @details This function is callback function to handle events from the database discovery module.
* Depending on the UUIDs that are discovered, this function should forward the events
* to their respective services.
*
* @param[in] p_event Pointer to the database discovery event.
*/
static void db_disc_handler(ble_db_discovery_evt_t * p_evt)
{
ble_lbs_on_db_disc_evt(&m_ble_lbs_c, p_evt);
}
/**@brief Database discovery initialization.
*/
static void db_discovery_init(void)
{
ble_db_discovery_init_t db_init;
memset(&db_init, 0, sizeof(db_init));
db_init.evt_handler = db_disc_handler;
db_init.p_gatt_queue = &m_ble_gatt_queue;
ret_code_t err_code = ble_db_discovery_init(&db_init);
APP_ERROR_CHECK(err_code);
}
/**@brief Function for initializing the log.
*/
static void log_init(void)
{
ret_code_t err_code = NRF_LOG_INIT(NULL);
APP_ERROR_CHECK(err_code);
NRF_LOG_DEFAULT_BACKENDS_INIT();
}
/**@brief Function for initializing the timer.
*/
static void timer_init(void)
{
ret_code_t err_code = app_timer_init();
APP_ERROR_CHECK(err_code);
}
/**@brief Function for initializing the Power manager. */
static void power_management_init(void)
{
ret_code_t err_code;
err_code = nrf_pwr_mgmt_init();
APP_ERROR_CHECK(err_code);
}
static void scan_init(void)
{
ret_code_t err_code;
nrf_ble_scan_init_t init_scan;
memset(&init_scan, 0, sizeof(init_scan));
init_scan.connect_if_match = true;
init_scan.conn_cfg_tag = APP_BLE_CONN_CFG_TAG;
err_code = nrf_ble_scan_init(&m_scan, &init_scan, scan_evt_handler);
APP_ERROR_CHECK(err_code);
// Setting filters for scanning.
err_code = nrf_ble_scan_filters_enable(&m_scan, NRF_BLE_SCAN_NAME_FILTER, false);
APP_ERROR_CHECK(err_code);
err_code = nrf_ble_scan_filter_set(&m_scan, SCAN_NAME_FILTER, m_target_periph_name);
APP_ERROR_CHECK(err_code);
}
/**@brief Function for initializing the GATT module.
*/
static void gatt_init(void)
{
ret_code_t err_code = nrf_ble_gatt_init(&m_gatt, NULL);
APP_ERROR_CHECK(err_code);
}
/**@brief Function for handling the idle state (main loop).
*
* @details Handle any pending log operation(s), then sleep until the next event occurs.
*/
static void idle_state_handle(void)
{
NRF_LOG_FLUSH();
nrf_pwr_mgmt_run();
}
int main(void)
{
// Initialize.
log_init();
timer_init();
leds_init();
buttons_init();
power_management_init();
pwminit();
/* Init systick driver */
nrf_drv_systick_init();
tick_timer_init();
EINK_InitDriver();
EINK_Start(20);
EINK_Power(1);
// EINK_Clear(true,true);
epd_update(0,0);
#if 0
nrfx_systick_delay_ms(2000);
epd_update(0,1);
nrfx_systick_delay_ms(2000);
epd_update(0,2);
nrfx_systick_delay_ms(2000);
epd_update(1,0);
nrfx_systick_delay_ms(2000);
epd_update(1,1);
nrfx_systick_delay_ms(2000);
epd_update(1,2);
nrfx_systick_delay_ms(2000);
#endif
ble_stack_init();
scan_init();
gatt_init();
db_discovery_init();
lbs_c_init();
// Start execution.
NRF_LOG_INFO("Blinky CENTRAL example started.");
scan_start();
// Turn on the LED to signal scanning.
bsp_board_led_on(CENTRAL_SCANNING_LED);
// Enter main loop.
for (;;)
{
if(sani_level != psani_level)
{
epd_update(door_status,sani_level);
psani_level = sani_level;
}
if(door_status)
{
epd_update(door_status,sani_level);
nrf_drv_systick_delay_ms(5000);
app_pwm_channel_duty_ticks_set(&PWM1,0,m_servo_min);
door_status = 0;
epd_update(door_status,sani_level);
}
idle_state_handle();
}
}
/***************************************************************************//**
* @file
* @brief hallservice.c
*******************************************************************************
* # License
* <b>Copyright 2018 Silicon Laboratories Inc. www.silabs.com</b>
*******************************************************************************
*
* The licensor of this software is Silicon Laboratories Inc. Your use of this
* software is governed by the terms of Silicon Labs Master Software License
* Agreement (MSLA) available at
* www.silabs.com/about-us/legal/master-software-license-agreement. This
* software is distributed to you in Source Code format and is governed by the
* sections of the MSLA applicable to Source Code.
*
******************************************************************************/
/* standard library headers */
#include <stdint.h>
#include <stdio.h>
#include <stdbool.h>
#include <math.h>
/* BG stack headers */
#include "bg_types.h"
#include "gatt_db.h"
#include "native_gecko.h"
#include "infrastructure.h"
#include "thunderboard/board.h"
/* plugin headers */
#include "connection.h"
/* Own header*/
#include "hallservice.h"
#include "aio.h"
#define CP_OPCODE_TAMPER_CLEAR 0x01
static float magneticField;
static uint8_t hallState;
static bool stateChangeNotification;
static bool fieldNotification;
static bool tamperLatched;
uint8_t sanilevel=0;
static uint8_t hallNotifyData[2]={0x00,0x00};
void hallServiceInit(void)
{
stateChangeNotification = false;
fieldNotification = false;
tamperLatched = false;
return;
}
void hallServiceStateChanged(uint8_t state)
{
struct gecko_msg_gatt_server_send_characteristic_notification_rsp_t* gsscnrsp = NULL;
const char *stateStr = "";
switch (state) {
case HALLS_STATE_CLOSED:
stateStr = "Closed";
break;
case HALLS_STATE_OPEN:
stateStr = "Open";
break;
case HALLS_STATE_TAMPER:
stateStr = "Tamper";
break;
}
printf("HALL: State CHG %d -> %d (%s)%s\r\n", hallState, state, stateStr, tamperLatched ? " - Tamper latched!" : "");
hallNotifyData[0] = state;
// Notify any subscribers
if ( stateChangeNotification && !tamperLatched ) {
gsscnrsp = gecko_cmd_gatt_server_send_characteristic_notification(
conGetConnectionId(),
gattdb_hall_state,
sizeof(hallNotifyData),
&hallNotifyData[0]);
APP_ASSERT_DBG(!gsscnrsp->result, gsscnrsp->result);
}
if ( hallNotifyData[0] == HALLS_STATE_TAMPER ) {
tamperLatched = true;
}
}
void hallServiceStateRead(void)
{
uint8_t state;
struct gecko_msg_gatt_server_send_user_read_response_rsp_t* gssurrrsp = NULL;
if ( tamperLatched ) {
state = HALLS_STATE_TAMPER;
} else {
state = hallState;
}
printf("HALL: State = %u\r\n", state);
/* Send response to read request */
gssurrrsp = gecko_cmd_gatt_server_send_user_read_response(conGetConnectionId(),
gattdb_hall_state,
0,
sizeof(state),
&state);
APP_ASSERT_DBG(!gssurrrsp->result, gssurrrsp->result);
return;
}
void hallServiceStateStatusChange(uint8_t connection,
uint16_t clientConfig)
{
printf("HALL: State Status Change: %d:%04x\r\n", connection, clientConfig);
stateChangeNotification = (clientConfig > 0);
return;
}
void hallServicePinUpdate()
{
uint8_t inStates=0;
uint32_t i;
struct gecko_msg_gatt_server_send_characteristic_notification_rsp_t* gsscnrsp = NULL;
AioDigitalState_t aioDigitalInStates[AIO_NUMBER_OF_DIGITAL_INPUTS];
aioDeviceDigitalInRead(aioDigitalInStates);
for (i = 0; i < AIO_NUMBER_OF_DIGITAL_INPUTS; i++) {
inStates |= aioDigitalInStates[i] << (i);
}
sanilevel = hallNotifyData[1]=inStates;
if(sanilevel==0x00)
{
BOARD_rgbledSetColor(100, 0, 0);
}
else if(sanilevel == 0x01)
{
BOARD_rgbledSetColor(100, 100, 0);
}
else{
BOARD_rgbledSetColor(0, 100, 0);
}
if (stateChangeNotification) {
/* Send response to read request */
gsscnrsp = gecko_cmd_gatt_server_send_characteristic_notification(conGetConnectionId(),
gattdb_hall_state,
sizeof(hallNotifyData),
&hallNotifyData[0]);
APP_ASSERT_DBG(!gsscnrsp->result, gsscnrsp->result);
}
}
void hallServiceFieldRead(void)
{
/* 1 uT */
int32_t magneticFlux;
struct gecko_msg_gatt_server_send_user_read_response_rsp_t* gssurrrsp = NULL;
/* Flux measured in uT. We want 1 mT. */
magneticFlux = (int32_t)((magneticField * 1000) + 0.5f);
printf("HALL: MagneticFlux = %4.3f mT (%ld)\r\n", magneticField, magneticFlux);
/* Send response to read request */
gssurrrsp = gecko_cmd_gatt_server_send_user_read_response(conGetConnectionId(),
gattdb_hall_field_strength,
0,
sizeof(magneticFlux),
(uint8_t*)&magneticFlux);
APP_ASSERT_DBG(!gssurrrsp->result, gssurrrsp->result);
return;
}
void hallServiceFieldStatusChange(uint8_t connection,
uint16_t clientConfig)
{
printf("HALL: Field Status Change: %d:%04x\r\n", connection, clientConfig);
fieldNotification = (clientConfig > 0);
return;
}
void hallServiceFieldUpdated(float field)
{
int32_t magneticFlux;
struct gecko_msg_gatt_server_send_characteristic_notification_rsp_t* gsscnrsp = NULL;
magneticField = field;
if ( fieldNotification ) {
/* Flux measured in uT. We want mT. */
magneticFlux = (int32_t)((magneticField * 1000) + 0.5f);
gsscnrsp = gecko_cmd_gatt_server_send_characteristic_notification(
conGetConnectionId(),
gattdb_hall_field_strength,
sizeof(magneticFlux),
(uint8_t*)&magneticFlux);
APP_ASSERT_DBG(!gsscnrsp->result, gsscnrsp->result);
}
}
void hallServiceReadControlPoint(void)
{
static uint32_t cp = 0;
struct gecko_msg_gatt_server_send_user_read_response_rsp_t* gssurrrsp = NULL;
cp++;
printf("HALL: CP read; cp = %d\r\n", (int)cp);
/* Send response to read request */
gssurrrsp = gecko_cmd_gatt_server_send_user_read_response(
conGetConnectionId(),
gattdb_hall_control_point,
0,
sizeof(cp),
(uint8_t *)&cp
);
APP_ASSERT_DBG(!gssurrrsp->result, gssurrrsp->result);
return;
}
void hallServiceControlPointChange(uint8_t connection, uint16_t clientConfig)
{
printf("HALL: CP change; conn = %d data = %04x\r\n", connection, clientConfig);
return;
}
/* Write response codes*/
#define HALLS_WRITE_OK 0
void hallServiceControlPointWrite(uint8array *writeValue)
{
struct gecko_msg_gatt_server_send_user_write_response_rsp_t* gssuwrrsp = NULL;
printf("HALL: CP write; %d : %02x:%02x\r\n",
writeValue->len,
writeValue->data[0],
writeValue->data[1]
);
gssuwrrsp = gecko_cmd_gatt_server_send_user_write_response(
conGetConnectionId(),
gattdb_es_control_point,
HALLS_WRITE_OK
);
APP_ASSERT_DBG(!gssuwrrsp->result, gssuwrrsp->result);
switch (writeValue->data[0]) {
case CP_OPCODE_TAMPER_CLEAR:
tamperLatched = false;
// Trigger a notification if enabled
hallServiceStateChanged(hallState);
break;
}
return;
}
void hallServiceControlPointStatusChange(uint8_t connection, uint16_t clientConfig)
{
printf("HALLS_CP_Change: %d:%04x\r\n", connection, clientConfig);
return;
}





{kind=link}
Comments
Please log in or sign up to comment.