#include "LedControl.h" // LedControl library is used for controlling a LED matrix. Find it using Library Manager or download zip here: https://github.com/wayoda/LedControl
// there are defined all the pins
struct Pin {
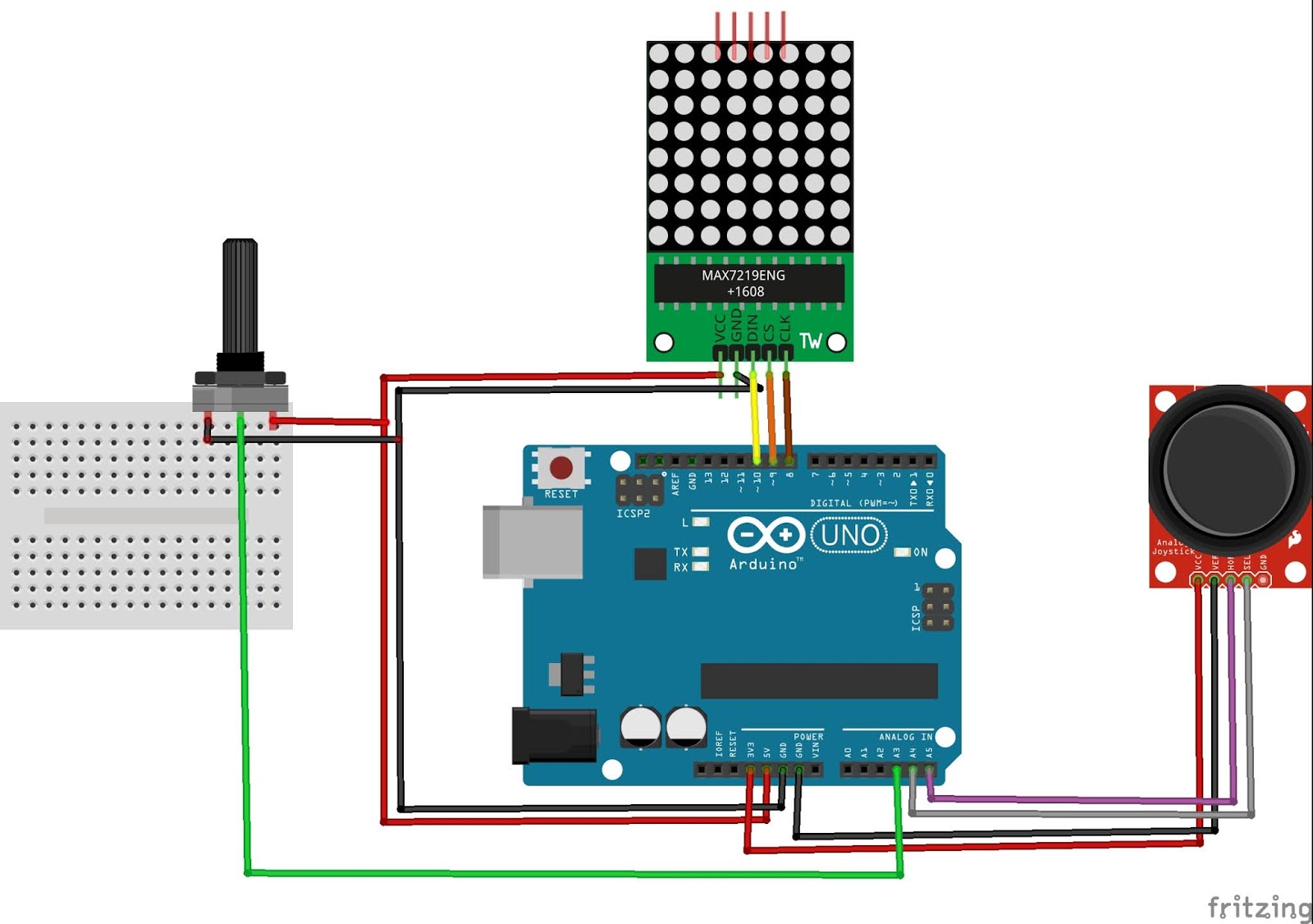
static const short joystickX = A5; // joystick X axis pin
static const short joystickY = A4; // joystick Y axis pin
static const short joystickVCC = 1; // virtual VCC for the joystick (Analog 1) (to make the joystick connectable right next to the arduino nano)
static const short joystickGND = 2; // virtual GND for the joystick (Analog 0) (to make the joystick connectable right next to the arduino nano)
static const short potentiometer = A3; // potentiometer for snake speed control
static const short CLK = 8; // clock for LED matrix
static const short CS = 9; // chip-select for LED matrix
static const short DIN = 10; // data-in for LED matrix
};
// LED matrix brightness: between 0(darkest) and 15(brightest)
const short intensity = 8;
// lower = faster message scrolling
const short messageSpeed = 5;
// initial snake length (1...63, recommended 3)
const short initialSnakeLength = 3;
void setup() {
Serial.begin(115200); // set the same baud rate on your Serial Monitor
initialize(); // initialize pins & LED matrix
calibrateJoystick(); // calibrate the joystick home (do not touch it)
showSnakeMessage(); // scrolls the 'snake' message around the matrix
}
void loop() {
generateFood(); // if there is no food, generate one
scanJoystick(); // watches joystick movements & blinks with food
calculateSnake(); // calculates snake parameters
handleGameStates();
// uncomment this if you want the current game board to be printed to the serial (slows down the game a bit)
// dumpGameBoard();
}
// --------------------------------------------------------------- //
// -------------------- supporting variables --------------------- //
// --------------------------------------------------------------- //
LedControl matrix(Pin::DIN, Pin::CLK, Pin::CS, 1);
struct Point {
int row = 0, col = 0;
Point(int row = 0, int col = 0): row(row), col(col) {}
};
struct Coordinate {
int x = 0, y = 0;
Coordinate(int x = 0, int y = 0): x(x), y(y) {}
};
bool win = false;
bool gameOver = false;
// primary snake head coordinates (snake head), it will be randomly generated
Point snake;
// food is not anywhere yet
Point food(-1, -1);
// construct with default values in case the user turns off the calibration
Coordinate joystickHome(500, 500);
// snake parameters
int snakeLength = initialSnakeLength; // choosed by the user in the config section
int snakeSpeed = 1; // will be set according to potentiometer value, cannot be 0
int snakeDirection = 0; // if it is 0, the snake does not move
// direction constants
const short up = 1;
const short right = 2;
const short down = 3; // 'down - 2' must be 'up'
const short left = 4; // 'left - 2' must be 'right'
// threshold where movement of the joystick will be accepted
const int joystickThreshold = 160;
// artificial logarithmity (steepness) of the potentiometer (-1 = linear, 1 = natural, bigger = steeper (recommended 0...1))
const float logarithmity = 0.4;
// snake body segments storage
int gameboard[8][8] = {};
// --------------------------------------------------------------- //
// -------------------------- functions -------------------------- //
// --------------------------------------------------------------- //
// if there is no food, generate one, also check for victory
void generateFood() {
if (food.row == -1 || food.col == -1) {
// self-explanatory
if (snakeLength >= 64) {
win = true;
return; // prevent the food generator from running, in this case it would run forever, because it will not be able to find a pixel without a snake
}
// generate food until it is in the right position
do {
food.col = random(8);
food.row = random(8);
} while (gameboard[food.row][food.col] > 0);
}
}
// watches joystick movements & blinks with food
void scanJoystick() {
int previousDirection = snakeDirection; // save the last direction
long timestamp = millis();
while (millis() < timestamp + snakeSpeed) {
// calculate snake speed exponentially (10...1000ms)
float raw = mapf(analogRead(Pin::potentiometer), 0, 1023, 0, 1);
snakeSpeed = mapf(pow(raw, 3.5), 0, 1, 10, 1000); // change the speed exponentially
if (snakeSpeed == 0) snakeSpeed = 1; // safety: speed can not be 0
// determine the direction of the snake
analogRead(Pin::joystickY) < joystickHome.y - joystickThreshold ? snakeDirection = up : 0;
analogRead(Pin::joystickY) > joystickHome.y + joystickThreshold ? snakeDirection = down : 0;
analogRead(Pin::joystickX) < joystickHome.x - joystickThreshold ? snakeDirection = left : 0;
analogRead(Pin::joystickX) > joystickHome.x + joystickThreshold ? snakeDirection = right : 0;
// ignore directional change by 180 degrees (no effect for non-moving snake)
snakeDirection + 2 == previousDirection && previousDirection != 0 ? snakeDirection = previousDirection : 0;
snakeDirection - 2 == previousDirection && previousDirection != 0 ? snakeDirection = previousDirection : 0;
// intelligently blink with the food
matrix.setLed(0, food.row, food.col, millis() % 100 < 50 ? 1 : 0);
}
}
// calculate snake movement data
void calculateSnake() {
switch (snakeDirection) {
case up:
snake.row--;
fixEdge();
matrix.setLed(0, snake.row, snake.col, 1);
break;
case right:
snake.col++;
fixEdge();
matrix.setLed(0, snake.row, snake.col, 1);
break;
case down:
snake.row++;
fixEdge();
matrix.setLed(0, snake.row, snake.col, 1);
break;
case left:
snake.col--;
fixEdge();
matrix.setLed(0, snake.row, snake.col, 1);
break;
default: // if the snake is not moving, exit
return;
}
// if there is a snake body segment, this will cause the end of the game (snake must be moving)
if (gameboard[snake.row][snake.col] > 1 && snakeDirection != 0) {
gameOver = true;
return;
}
// check if the food was eaten
if (snake.row == food.row && snake.col == food.col) {
food.row = -1; // reset food
food.col = -1;
// increment snake length
snakeLength++;
// increment all the snake body segments
for (int row = 0; row < 8; row++) {
for (int col = 0; col < 8; col++) {
if (gameboard[row][col] > 0 ) {
gameboard[row][col]++;
}
}
}
}
// add new segment at the snake head location
gameboard[snake.row][snake.col] = snakeLength + 1; // will be decremented in a moment
// decrement all the snake body segments, if segment is 0, turn the corresponding led off
for (int row = 0; row < 8; row++) {
for (int col = 0; col < 8; col++) {
// if there is a body segment, decrement it's value
if (gameboard[row][col] > 0 ) {
gameboard[row][col]--;
}
// display the current pixel
matrix.setLed(0, row, col, gameboard[row][col] == 0 ? 0 : 1);
}
}
}
// causes the snake to appear on the other side of the screen if it gets out of the edge
void fixEdge() {
snake.col < 0 ? snake.col += 8 : 0;
snake.col > 7 ? snake.col -= 8 : 0;
snake.row < 0 ? snake.row += 8 : 0;
snake.row > 7 ? snake.row -= 8 : 0;
}
void handleGameStates() {
if (gameOver || win) {
unrollSnake();
showScoreMessage(snakeLength - initialSnakeLength);
if (gameOver) showGameOverMessage();
else if (win) showWinMessage();
// re-init the game
win = false;
gameOver = false;
snake.row = random(8);
snake.col = random(8);
food.row = -1;
food.col = -1;
snakeLength = initialSnakeLength;
snakeDirection = 0;
memset(gameboard, 0, sizeof(gameboard[0][0]) * 8 * 8);
matrix.clearDisplay(0);
}
}
void unrollSnake() {
// switch off the food LED
matrix.setLed(0, food.row, food.col, 0);
delay(800);
// flash the screen 5 times
for (int i = 0; i < 5; i++) {
// invert the screen
for (int row = 0; row < 8; row++) {
for (int col = 0; col < 8; col++) {
matrix.setLed(0, row, col, gameboard[row][col] == 0 ? 1 : 0);
}
}
delay(20);
// invert it back
for (int row = 0; row < 8; row++) {
for (int col = 0; col < 8; col++) {
matrix.setLed(0, row, col, gameboard[row][col] == 0 ? 0 : 1);
}
}
delay(50);
}
delay(600);
for (int i = 1; i <= snakeLength; i++) {
for (int row = 0; row < 8; row++) {
for (int col = 0; col < 8; col++) {
if (gameboard[row][col] == i) {
matrix.setLed(0, row, col, 0);
delay(100);
}
}
}
}
}
// calibrate the joystick home for 10 times
void calibrateJoystick() {
Coordinate values;
for (int i = 0; i < 10; i++) {
values.x += analogRead(Pin::joystickX);
values.y += analogRead(Pin::joystickY);
}
joystickHome.x = values.x / 10;
joystickHome.y = values.y / 10;
}
void initialize() {
pinMode(Pin::joystickVCC, OUTPUT);
digitalWrite(Pin::joystickVCC, HIGH);
pinMode(Pin::joystickGND, OUTPUT);
digitalWrite(Pin::joystickGND, LOW);
matrix.shutdown(0, false);
matrix.setIntensity(0, intensity);
matrix.clearDisplay(0);
randomSeed(analogRead(A5));
snake.row = random(8);
snake.col = random(8);
}
void dumpGameBoard() {
String buff = "\n\n\n";
for (int row = 0; row < 8; row++) {
for (int col = 0; col < 8; col++) {
if (gameboard[row][col] < 10) buff += " ";
if (gameboard[row][col] != 0) buff += gameboard[row][col];
else if (col == food.col && row == food.row) buff += "@";
else buff += "-";
buff += " ";
}
buff += "\n";
}
Serial.println(buff);
}
// --------------------------------------------------------------- //
// -------------------------- messages --------------------------- //
// --------------------------------------------------------------- //
const PROGMEM bool snakeMessage[8][84] = {
{0,0,0,0,0,0,0,0, 0,1,1,0,0,0,0,1,1,0,1,1,1,1,1,0,0,0,0,0,0,0,0,0,0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{0,0,0,0,0,0,0,0, 0,1,1,1,0,0,1,1,1,0,1,1,0,0,0,1,0,0,0,0,0,0,0,0,0, 1, 1, 1, 1, 0, 0, 0, 1, 1, 0, 0, 0, 1, 1, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{0,0,0,0,0,0,0,0, 0,1,1,0,1,1,0,1,1,0,1,1,0,0,0,1,0,0,0,0,0,0,0,0,1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 1, 1, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{0,0,0,0,0,0,0,0, 0,1,1,0,1,1,0,1,1,0,1,1,0,0,0,1,0,0,0,0,0,0,0,0,1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{0,0,0,0,0,0,0,0, 0,1,1,0,1,1,0,1,1,0,1,1,1,1,1,0,0,0,0,0,0,0,0,0,0, 1, 1, 1, 1, 0, 0, 0, 1, 1, 0, 1, 1, 1, 1, 0, 0, 1, 1, 1, 1, 1, 1, 0, 0, 1, 1, 1, 0, 0, 0, 0, 0, 1, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{0,0,0,0,0,0,0,0, 0,1,1,0,1,1,0,1,1,0,1,1,0,1,0,0,0,0,0,0,0,0,0,0,0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{0,0,0,0,0,0,0,0, 0,1,1,0,0,0,0,1,1,0,1,1,0,0,1,0,0,0,0,1,1,0,0,0,1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 1, 1, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{0,0,0,0,0,0,0,0, 0,1,1,0,0,0,0,1,1,0,1,1,0,0,0,1,0,0,0,1,1,0,0,0,1, 0,1, 1, 1, 0, 0, 0, 1, 1, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0}
};
const PROGMEM bool gameOverMessage[8][90] = {
{0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 1, 1, 0, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1, 1, 0, 0, 1, 1, 1, 1, 1, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 0, 1, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 1, 1, 0, 0, 1, 1, 0, 1, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1, 0, 0, 0, 1, 1, 1, 1, 1, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 1, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 1, 1, 1, 1, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0}
};
const PROGMEM bool scoreMessage[8][58] = {
{0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 1, 1, 1, 1, 1, 0, 0, 0, 1, 1, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1, 0, 0, 0, 1, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 0, 1, 1, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 0, 0, 0, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 0, 1, 1, 1, 1, 0, 0, 0, 1, 1, 0, 0, 1, 1, 0, 0, 1, 1, 1, 1, 1, 1, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0}
};
const PROGMEM bool digits[][8][8] = {
{
{0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 1, 1, 1, 1, 0, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 1, 1, 0, 1, 1, 1, 0},
{0, 1, 1, 1, 0, 1, 1, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 0, 1, 1, 1, 1, 0, 0}
},
{
{0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 1, 1, 0, 0, 0},
{0, 0, 0, 1, 1, 0, 0, 0},
{0, 0, 1, 1, 1, 0, 0, 0},
{0, 0, 0, 1, 1, 0, 0, 0},
{0, 0, 0, 1, 1, 0, 0, 0},
{0, 0, 0, 1, 1, 0, 0, 0},
{0, 1, 1, 1, 1, 1, 1, 0}
},
{
{0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 1, 1, 1, 1, 0, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 0, 0, 0, 0, 1, 1, 0},
{0, 0, 0, 0, 1, 1, 0, 0},
{0, 0, 1, 1, 0, 0, 0, 0},
{0, 1, 1, 0, 0, 0, 0, 0},
{0, 1, 1, 1, 1, 1, 1, 0}
},
{
{0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 1, 1, 1, 1, 0, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 0, 0, 0, 0, 1, 1, 0},
{0, 0, 0, 1, 1, 1, 0, 0},
{0, 0, 0, 0, 0, 1, 1, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 0, 1, 1, 1, 1, 0, 0}
},
{
{0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 0, 1, 1, 0, 0},
{0, 0, 0, 1, 1, 1, 0, 0},
{0, 0, 1, 0, 1, 1, 0, 0},
{0, 1, 0, 0, 1, 1, 0, 0},
{0, 1, 1, 1, 1, 1, 1, 0},
{0, 0, 0, 0, 1, 1, 0, 0},
{0, 0, 0, 0, 1, 1, 0, 0}
},
{
{0, 0, 0, 0, 0, 0, 0, 0},
{0, 1, 1, 1, 1, 1, 1, 0},
{0, 1, 1, 0, 0, 0, 0, 0},
{0, 1, 1, 1, 1, 1, 0, 0},
{0, 0, 0, 0, 0, 1, 1, 0},
{0, 0, 0, 0, 0, 1, 1, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 0, 1, 1, 1, 1, 0, 0}
},
{
{0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 1, 1, 1, 1, 0, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 1, 1, 0, 0, 0, 0, 0},
{0, 1, 1, 1, 1, 1, 0, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 0, 1, 1, 1, 1, 0, 0}
},
{
{0, 0, 0, 0, 0, 0, 0, 0},
{0, 1, 1, 1, 1, 1, 1, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 0, 0, 0, 1, 1, 0, 0},
{0, 0, 0, 0, 1, 1, 0, 0},
{0, 0, 0, 1, 1, 0, 0, 0},
{0, 0, 0, 1, 1, 0, 0, 0},
{0, 0, 0, 1, 1, 0, 0, 0}
},
{
{0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 1, 1, 1, 1, 0, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 0, 1, 1, 1, 1, 0, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 0, 1, 1, 1, 1, 0, 0}
},
{
{0, 0, 0, 0, 0, 0, 0, 0},
{0, 0, 1, 1, 1, 1, 0, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 0, 1, 1, 1, 1, 1, 0},
{0, 0, 0, 0, 0, 1, 1, 0},
{0, 1, 1, 0, 0, 1, 1, 0},
{0, 0, 1, 1, 1, 1, 0, 0}
}
};
// scrolls the 'snake' message around the matrix
void showSnakeMessage() {
[&] {
for (int d = 0; d < sizeof(snakeMessage[0]) - 7; d++) {
for (int col = 0; col < 8; col++) {
delay(messageSpeed);
for (int row = 0; row < 8; row++) {
// this reads the byte from the PROGMEM and displays it on the screen
matrix.setLed(0, row, col, pgm_read_byte(&(snakeMessage[row][col + d])));
}
}
// if the joystick is moved, exit the message
if (analogRead(Pin::joystickY) < joystickHome.y - joystickThreshold
|| analogRead(Pin::joystickY) > joystickHome.y + joystickThreshold
|| analogRead(Pin::joystickX) < joystickHome.x - joystickThreshold
|| analogRead(Pin::joystickX) > joystickHome.x + joystickThreshold) {
return; // return the lambda function
}
}
}();
matrix.clearDisplay(0);
// wait for joystick co come back
while (analogRead(Pin::joystickY) < joystickHome.y - joystickThreshold
|| analogRead(Pin::joystickY) > joystickHome.y + joystickThreshold
|| analogRead(Pin::joystickX) < joystickHome.x - joystickThreshold
|| analogRead(Pin::joystickX) > joystickHome.x + joystickThreshold) {}
}
// scrolls the 'game over' message around the matrix
void showGameOverMessage() {
[&] {
for (int d = 0; d < sizeof(gameOverMessage[0]) - 7; d++) {
for (int col = 0; col < 8; col++) {
delay(messageSpeed);
for (int row = 0; row < 8; row++) {
// this reads the byte from the PROGMEM and displays it on the screen
matrix.setLed(0, row, col, pgm_read_byte(&(gameOverMessage[row][col + d])));
}
}
// if the joystick is moved, exit the message
if (analogRead(Pin::joystickY) < joystickHome.y - joystickThreshold
|| analogRead(Pin::joystickY) > joystickHome.y + joystickThreshold
|| analogRead(Pin::joystickX) < joystickHome.x - joystickThreshold
|| analogRead(Pin::joystickX) > joystickHome.x + joystickThreshold) {
return; // return the lambda function
}
}
}();
matrix.clearDisplay(0);
// wait for joystick co come back
while (analogRead(Pin::joystickY) < joystickHome.y - joystickThreshold
|| analogRead(Pin::joystickY) > joystickHome.y + joystickThreshold
|| analogRead(Pin::joystickX) < joystickHome.x - joystickThreshold
|| analogRead(Pin::joystickX) > joystickHome.x + joystickThreshold) {}
}
// scrolls the 'win' message around the matrix
void showWinMessage() {
// not implemented yet // TODO: implement it
}
// scrolls the 'score' message with numbers around the matrix
void showScoreMessage(int score) {
if (score < 0 || score > 99) return;
// specify score digits
int second = score % 10;
int first = (score / 10) % 10;
[&] {
for (int d = 0; d < sizeof(scoreMessage[0]) + 2 * sizeof(digits[0][0]); d++) {
for (int col = 0; col < 8; col++) {
delay(messageSpeed);
for (int row = 0; row < 8; row++) {
if (d <= sizeof(scoreMessage[0]) - 8) {
matrix.setLed(0, row, col, pgm_read_byte(&(scoreMessage[row][col + d])));
}
int c = col + d - sizeof(scoreMessage[0]) + 6; // move 6 px in front of the previous message
// if the score is < 10, shift out the first digit (zero)
if (score < 10) c += 8;
if (c >= 0 && c < 8) {
if (first > 0) matrix.setLed(0, row, col, pgm_read_byte(&(digits[first][row][c]))); // show only if score is >= 10 (see above)
} else {
c -= 8;
if (c >= 0 && c < 8) {
matrix.setLed(0, row, col, pgm_read_byte(&(digits[second][row][c]))); // show always
}
}
}
}
// if the joystick is moved, exit the message
if (analogRead(Pin::joystickY) < joystickHome.y - joystickThreshold
|| analogRead(Pin::joystickY) > joystickHome.y + joystickThreshold
|| analogRead(Pin::joystickX) < joystickHome.x - joystickThreshold
|| analogRead(Pin::joystickX) > joystickHome.x + joystickThreshold) {
return; // return the lambda function
}
}
}();
matrix.clearDisplay(0);
// // wait for joystick co come back
// while (analogRead(Pin::joystickY) < joystickHome.y - joystickThreshold
// || analogRead(Pin::joystickY) > joystickHome.y + joystickThreshold
// || analogRead(Pin::joystickX) < joystickHome.x - joystickThreshold
// || analogRead(Pin::joystickX) > joystickHome.x + joystickThreshold) {}
}
// standard map function, but with floats
float mapf(float x, float in_min, float in_max, float out_min, float out_max) {
return (x - in_min) * (out_max - out_min) / (in_max - in_min) + out_min;
}



_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)








{kind=link}
Comments
Please log in or sign up to comment.