Introduction:
In our 4th year at Polytech Sorbonne, we developed an embedded system for monitoring beehives to assist beekeepers in tracking the health of their bees.
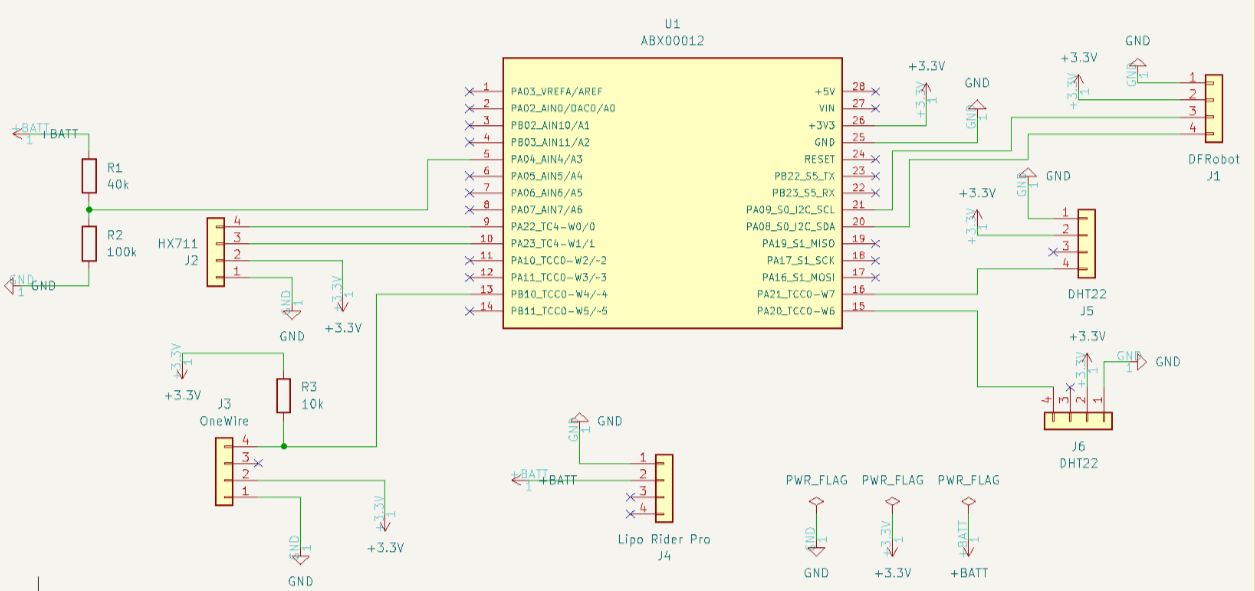
We used various sensors that transmitted data to the cloud via LoraWAN (The things Network) antenna. To improve efficiency, we built an autonomous prototype that self-charges using a solar panel.
Specifications:
Our goal is to provide beekeeper with some key metrics:
- Temperature
- Humidity
- Weight
- Luminosity
- Battery level
A critical aspect of the project was to send all the data through a LoRaWAN antenna, which will be discussed further.
Additionally, we had to ensure the device was waterproof to protect it from bees, as well as make it self-sufficient in line with our goal of a sustainable development project. Lastly, we aimed to provide beekeepers with access to the collected data.
WBS:
Beep (IHM):
Conclusion:
Throughout this project, we applied the skills and knowledge we gained from our engineering education. On the electronic side, we successfully designed and built a functional electronic system using professional tools while overcoming various challenges. On the IT side, we effectively managed the data generated by the system and made it accessible and useful for users. In terms of project management, we put into practice what we learned in class, specifically utilizing GANTT diagrams, PBS and WBS. This project serves as a tangible representation of our acquired expertise throughout our engineering training, as we were given a degree of autonomy and faced with a variety of problems that required us to find effective solutions. This experience allowed us to truly feel like engineers.
















_4YUDWziWQ8.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)














_Ujn5WoVOOu.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.