#include "IRremote.h"
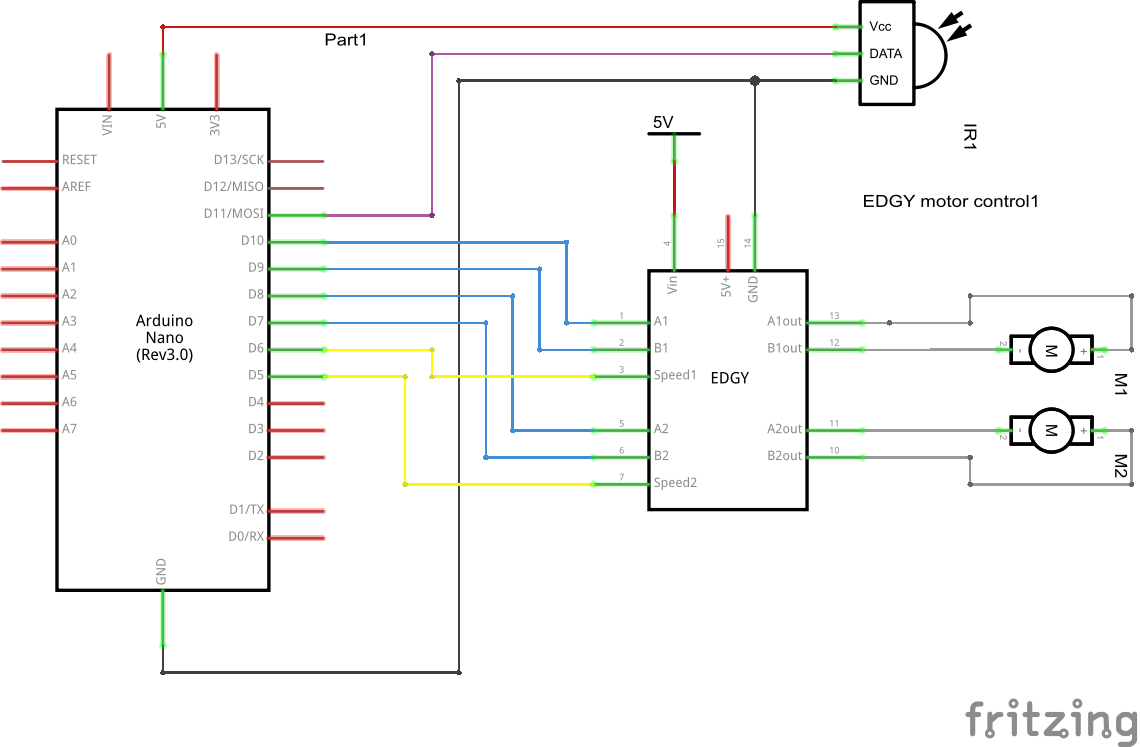
int receiver = 11;
int velocity1 = 100;
int velocity2 = 100;
int x;
int Power__ON = 0;
const int M1P1 = 7;
const int M1N1 = 8;
const int M2P2 = 9;
const int M2N2 = 10;
const int M1__Speed = 6;
const int M2__Speed = 5;
IRrecv irrecv(receiver);
decode_results results;
void setup()
{
Serial.begin(9600);
irrecv.enableIRIn();
pinMode(M1P1, OUTPUT);
pinMode(M1N1, OUTPUT);
pinMode(M2P2, OUTPUT);
pinMode(M2N2, OUTPUT);
pinMode(M1__Speed, OUTPUT);
pinMode(M2__Speed, OUTPUT);
}
void loop()
{
if (irrecv.decode(&results))
{
x = results.value & 0x0000ff;
Serial.println(results.value, HEX);
processIR();
irrecv.resume();
}
}
void processIR()
{
if (x == 0x1f) //previous
{
Serial.println("Motor 1 rotates forward");
digitalWrite(M1P1, HIGH);
digitalWrite(M1N1, LOW);
analogWrite(M1__Speed, velocity1);
}
else if (x == 0x57) //next
{
Serial.println("Motor 2 rotates forward");
digitalWrite(M2P2, LOW);
digitalWrite(M2N2, HIGH);
analogWrite(M2__Speed, velocity2);
}
else if (x == 0x5d) //turn on
{
Power__ON = Power__ON + 1;
int x = Power__ON % 2;
Serial.println(x);
if (x == 0)
{
Serial.println("Both Motor goes OFF");
digitalWrite(M1P1, LOW);
digitalWrite(M1N1, LOW);
digitalWrite(M1P1, LOW);
digitalWrite(M1N1, LOW);
analogWrite(M1__Speed, 0);
analogWrite(M2__Speed, 0);
}
else
{
Serial.println("Both Motor ready to run");
digitalWrite(M1P1, HIGH);
digitalWrite(M1N1, LOW);
digitalWrite(M1P1, HIGH);
digitalWrite(M1N1, LOW);
}
}
else if (x == 0x67) // vol+
{
velocity1 = velocity1 + 10;
analogWrite(M1__Speed, velocity1);
Serial.println(velocity1);
}
else if (x == 0x97) // vol-
{
velocity1 = velocity1 - 10;
analogWrite(M1__Speed, velocity1);
Serial.println(velocity1);
}
else if (x == 0xdd) //mode
{
velocity2 = velocity2 + 10;
analogWrite(M2__Speed, velocity2);
Serial.println(velocity2);
}
else if (x == 0x3d) //equ
{
velocity2 = velocity2 - 10;
analogWrite(M2__Speed, velocity2);
Serial.println(velocity2);
}
else
{
}
delay(500);
}















{kind=link}
Comments
Please log in or sign up to comment.