/*
* Project: Particle XYZ
* Author: Britney A. King
* Date: 12-2-24
*/
#include "Particle.h"
#include "HC_SR04.h"
#include "simple-OSC.h"
#include "Adafruit_BME280.h"
#include "credentials.h"
#include <Adafruit_MQTT.h>
#include "Adafruit_MQTT/Adafruit_MQTT_SPARK.h"
#include "Adafruit_MQTT/Adafruit_MQTT.h"
SYSTEM_MODE(SEMI_AUTOMATIC);
UDP osc;
// OSC Sending
IPAddress outIp(10, 75, 91, 78);//your computer IP
unsigned int outPort = 1234; //computer incoming port
// ULTRASONIC SENSOR
int DURATION;
float UltraSonic1;
float UltraSonic4;
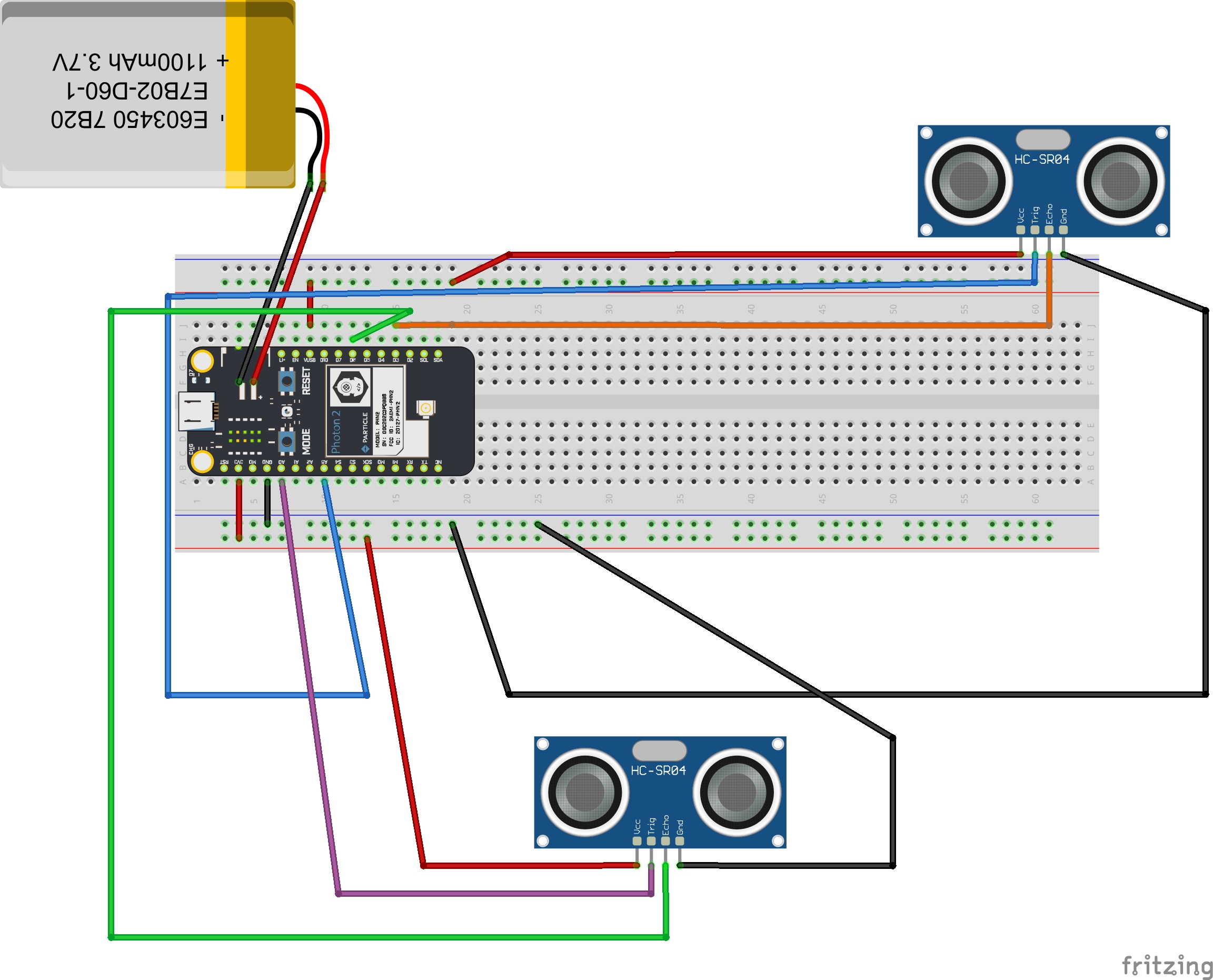
// Ultra Sonic Sensor 1
const int triggerPinSensor1 = A5;
const int echoPinSensor1 = D3;
HC_SR04 UltrasonicSensor1 = HC_SR04(triggerPinSensor1, echoPinSensor1);
int DISTANCE1;
// Ultra Sonic Sensor 4
const int triggerPinSensor4 = A0;
const int echoPinSensor4 = D6;
HC_SR04 UltrasonicSensor4 = HC_SR04(triggerPinSensor4, echoPinSensor4);
int DISTANCE4;
TCPClient TheClient;
Adafruit_MQTT_SPARK mqtt(&TheClient, AIO_SERVER, AIO_SERVERPORT, AIO_USERNAME, AIO_KEY);
// Setup Feeds to publish or subscribe
Adafruit_MQTT_Publish mqttUltraSonic1 = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/UltraSonic1");
Adafruit_MQTT_Publish mqttUltraSonic4 = Adafruit_MQTT_Publish(&mqtt, AIO_USERNAME "/feeds/UltraSonic4");
unsigned int last, lastTime;
void setup() {
// SERIAL
Serial.begin(9600);
osc.beginPacket(outIp,outPort);
osc.begin(outPort);
// Ultra Sonic Sensor 1
pinMode(triggerPinSensor1, OUTPUT);
pinMode(echoPinSensor1, INPUT);
// Ultra Sonic Sensor 4
pinMode(triggerPinSensor4, OUTPUT);
pinMode(echoPinSensor4, INPUT);
WiFi.on();
WiFi.connect();
while (WiFi.connecting())
{
Serial.printf(".");
}
}
void loop() {
// Ultra Sonic Sensor 1
digitalWrite(triggerPinSensor1,HIGH);
delay(1);
digitalWrite(triggerPinSensor1,LOW);
DURATION = pulseIn(echoPinSensor1,HIGH);
DISTANCE1 = DURATION / 30;
if(DISTANCE1 > 0 && DISTANCE1 < 250 ){
Serial.printf("%i \n", DISTANCE1);
delay(100);
}
// Ultra Sonic Sensor 4
digitalWrite(triggerPinSensor4,HIGH);
delay(1);
digitalWrite(triggerPinSensor4,LOW);
DURATION = pulseIn(echoPinSensor4,HIGH);
DISTANCE4 = DURATION / 30;
if(DISTANCE4 > 0 && DISTANCE4 < 250 ){
Serial.printf("%i \n", DISTANCE4);
}
//OSC Sending ULTRA SONIC 1
OSCMessage outMessage("/ULTRA SONIC 1");
outMessage.addInt(DISTANCE1);
outMessage.send(osc,outIp,outPort);
//OSC Sending ULTRA SONIC 2
OSCMessage outMessage2 ("/ULTRA SONIC 2");
outMessage.addInt(DISTANCE4);
outMessage.send(osc,outIp,outPort);
//Adafruit Dashboard publish
UltraSonic1 = DISTANCE1;
if (mqtt.Update())
{
mqttUltraSonic1.publish(UltraSonic1);
Serial.printf("Publishing UltraSonic1 %i \n", UltraSonic1);
}
lastTime = millis();
UltraSonic4 = DISTANCE4;
if (mqtt.Update())
{
mqttUltraSonic4.publish(UltraSonic4);
Serial.printf("Publishing UltraSonic4 %i \n", UltraSonic4);
}
lastTime = millis();
}











{kind=link}
Comments
Please log in or sign up to comment.