


Hardware components | ||||||
| × | 19 | ||||
| × | 3 | ||||
| × | 1 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 3 | ||||
| × | 420 | ||||
| × | 1 | ||||
 |
| × | 5 | |||
| × | 5 | ||||
| × | 1 | ||||
| × | 4 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
Hello!
This is an educational Arduino set I've prepared for my nieces to teach them about electronics. While I was at it - I decided to also make it Open Source and publish it on the internet for free!
All the files are available in English and Polish.
You need a 3D printer to print all the plastic elements.
Youtube video:
Thingiverse files:
Thingiverse files:https://www.thingiverse.com/thing:4176199
Needed parts (and approximate price):
- 19 3D printed plastic elements (0-10usd)
- 3x M3 washers (0, 5usd)
- 1x M3 14mm bolt (0, 5usd)
- 4x M3 12mm bolt (0, 5usd)
- 6x 8mm bolt + 3x 4mm bolt (sold with servos)
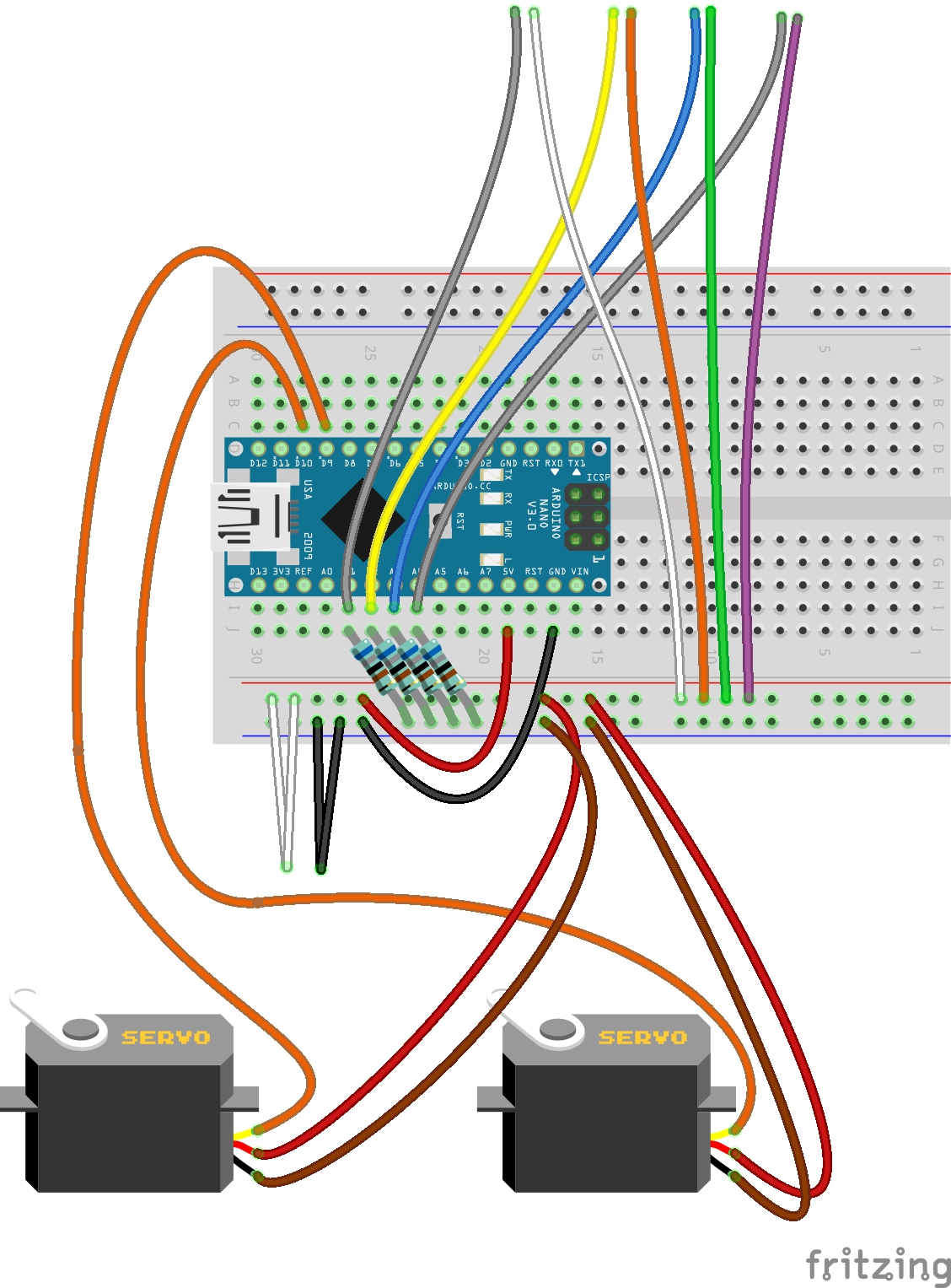
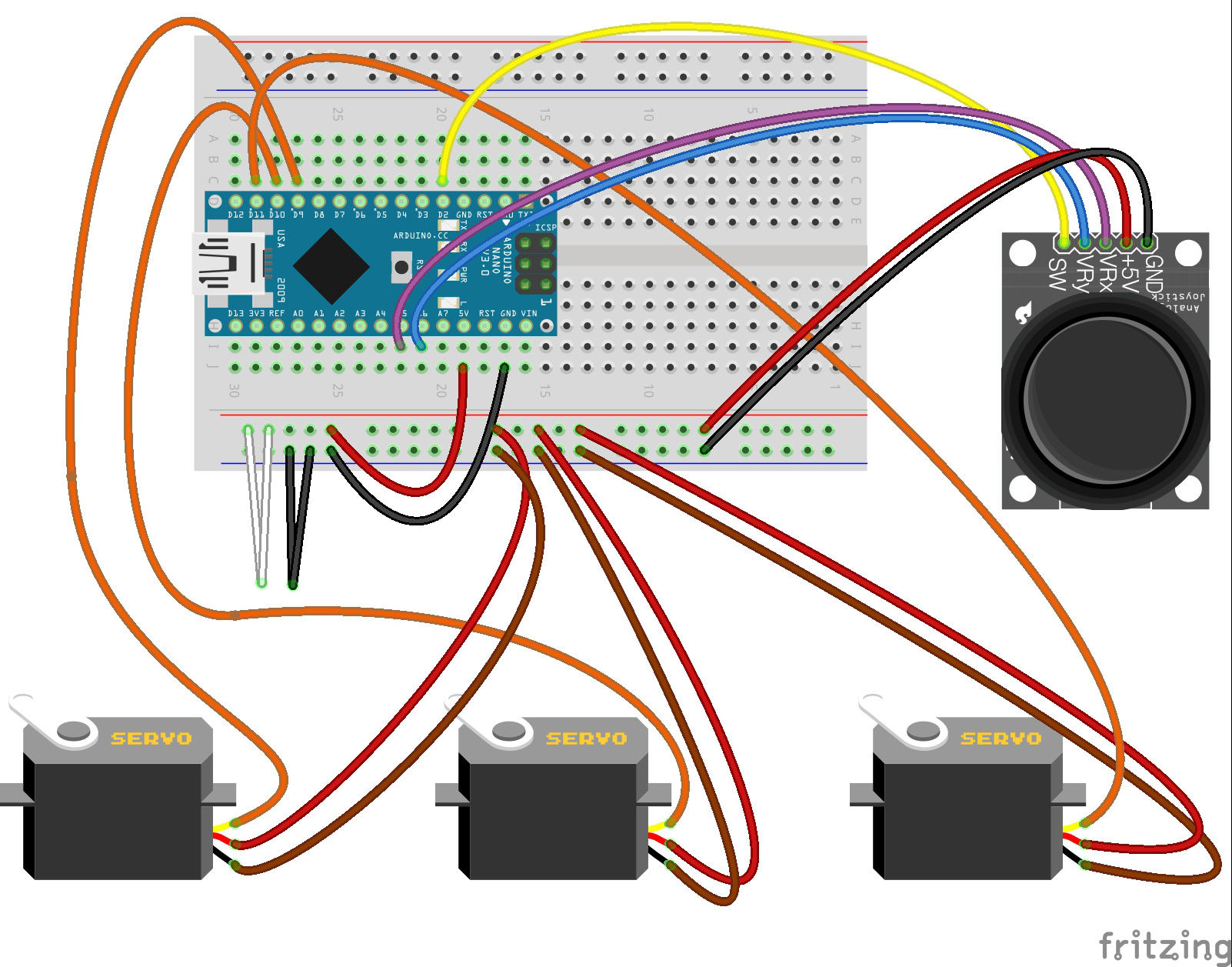
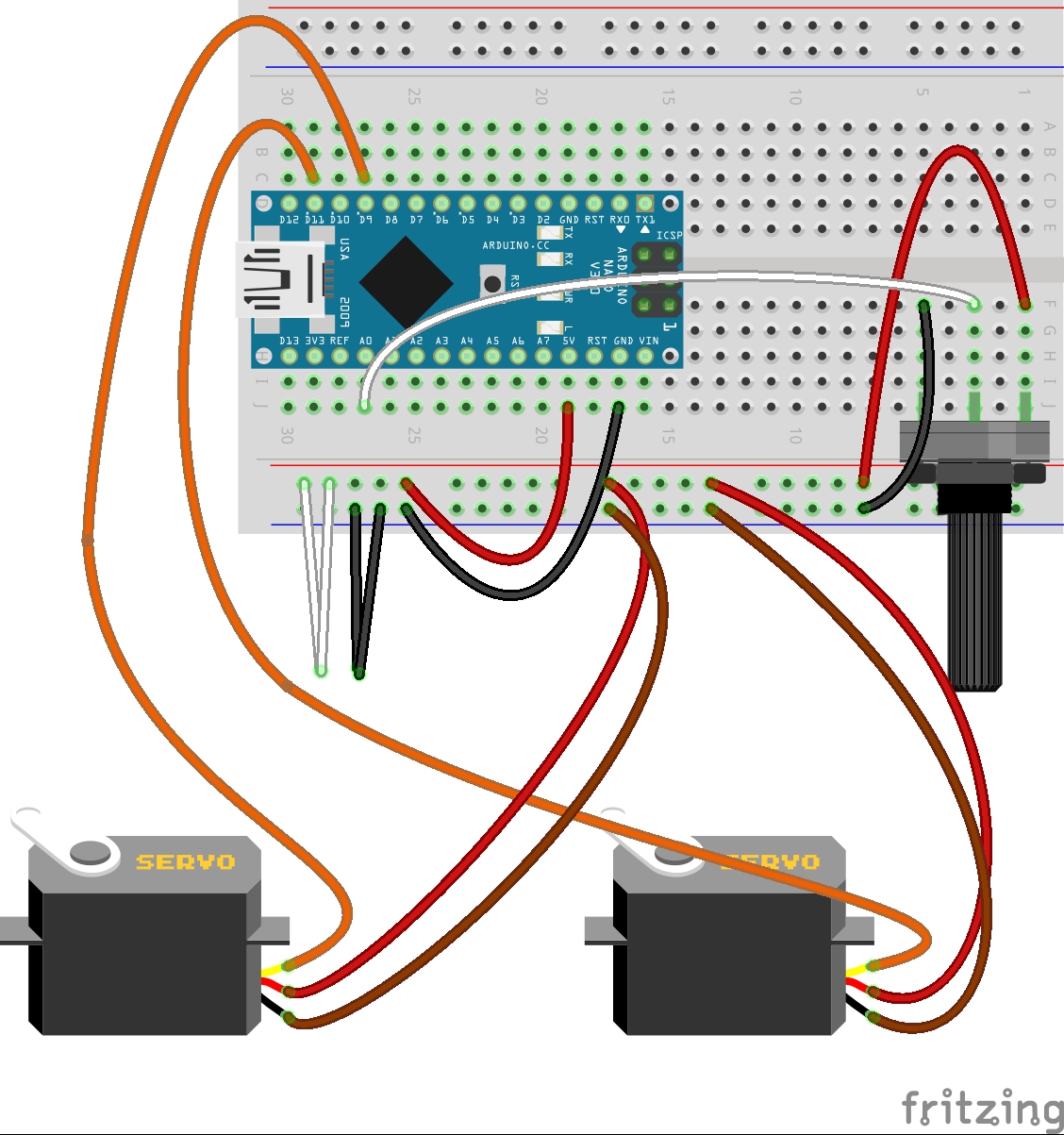
- 3x SG90 mini servo (4, 5usd)
- Dupont-style jumper wires, male-male, female-male (5usd)
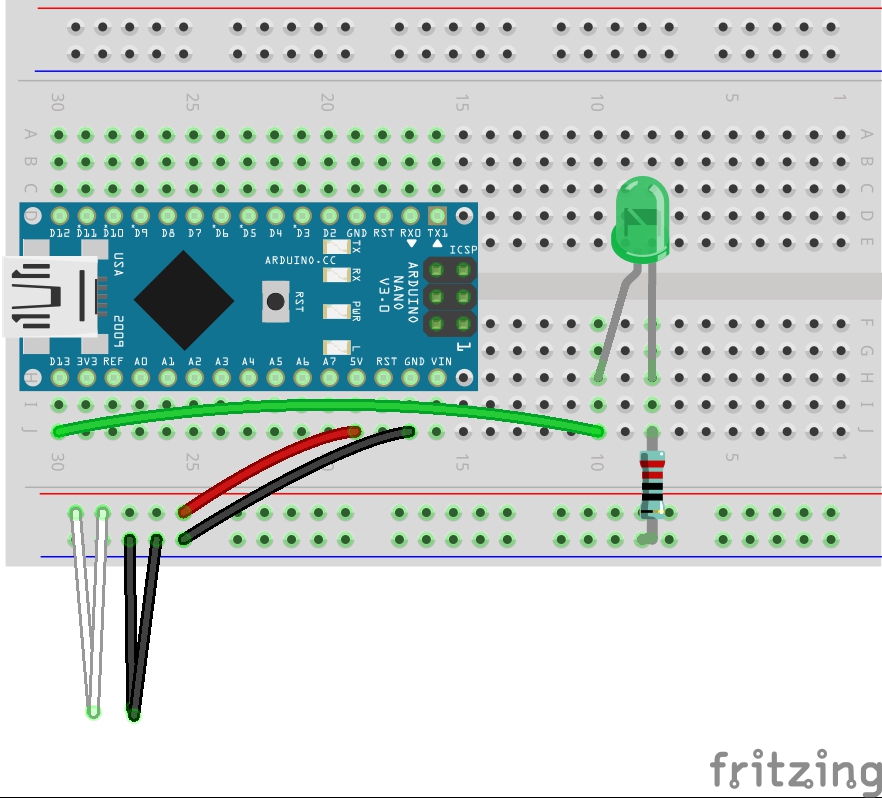
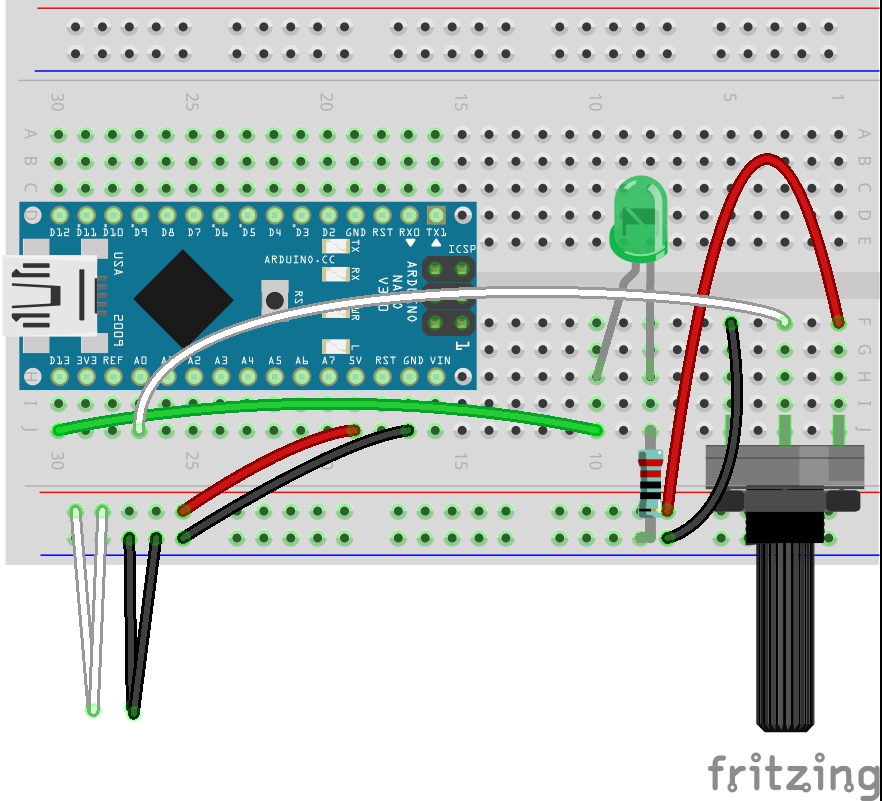
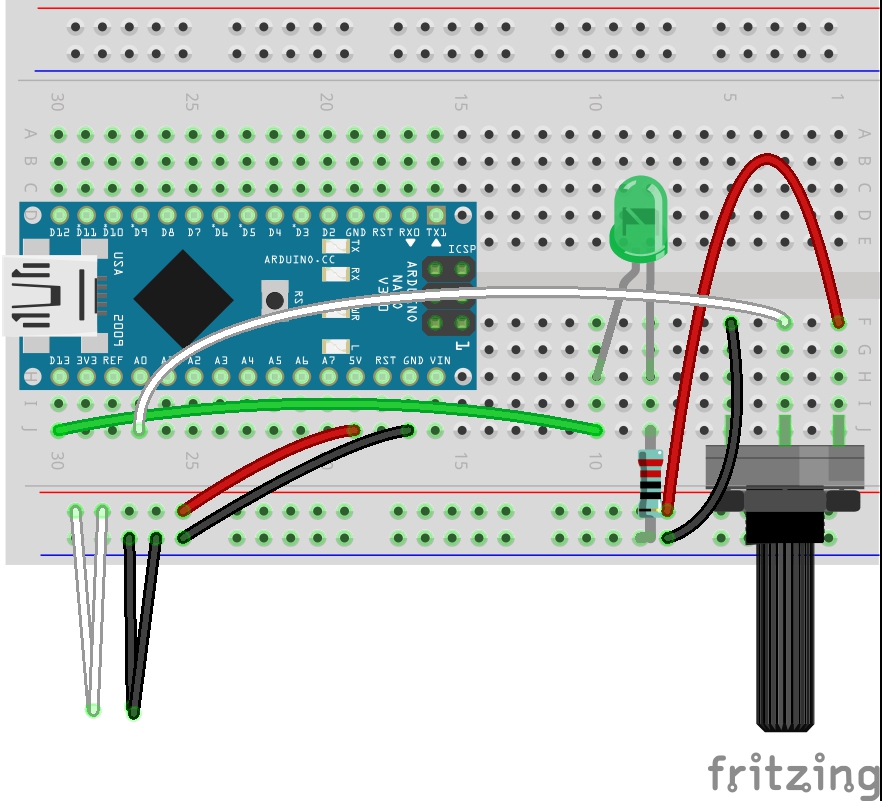
- Arduino nano compatible board (2usd)
- 10kOhm potentiometer (0, 5usd)
- 220 Ohm resistors (0, 5usd)
- 6800 Ohm
- 10 kOhm resistors (0, 5usd)- 5V LED (0, 5usd)
- 4x 10-20 kOhm photoresistors (1usd)
- 1x HW-504 joystick (2usd)
- 5V powers supply unit or a 5V 450mA phone charger (2usd)
- 1x 400 points solderless breadboard (2usd)
- 1x USB cable (1usd)
- 1x small screwdriver (1usd)
- empty cardboard box - optional (0usd)






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Comments