/* Arduino 'Can't Touch This' Device
Components:
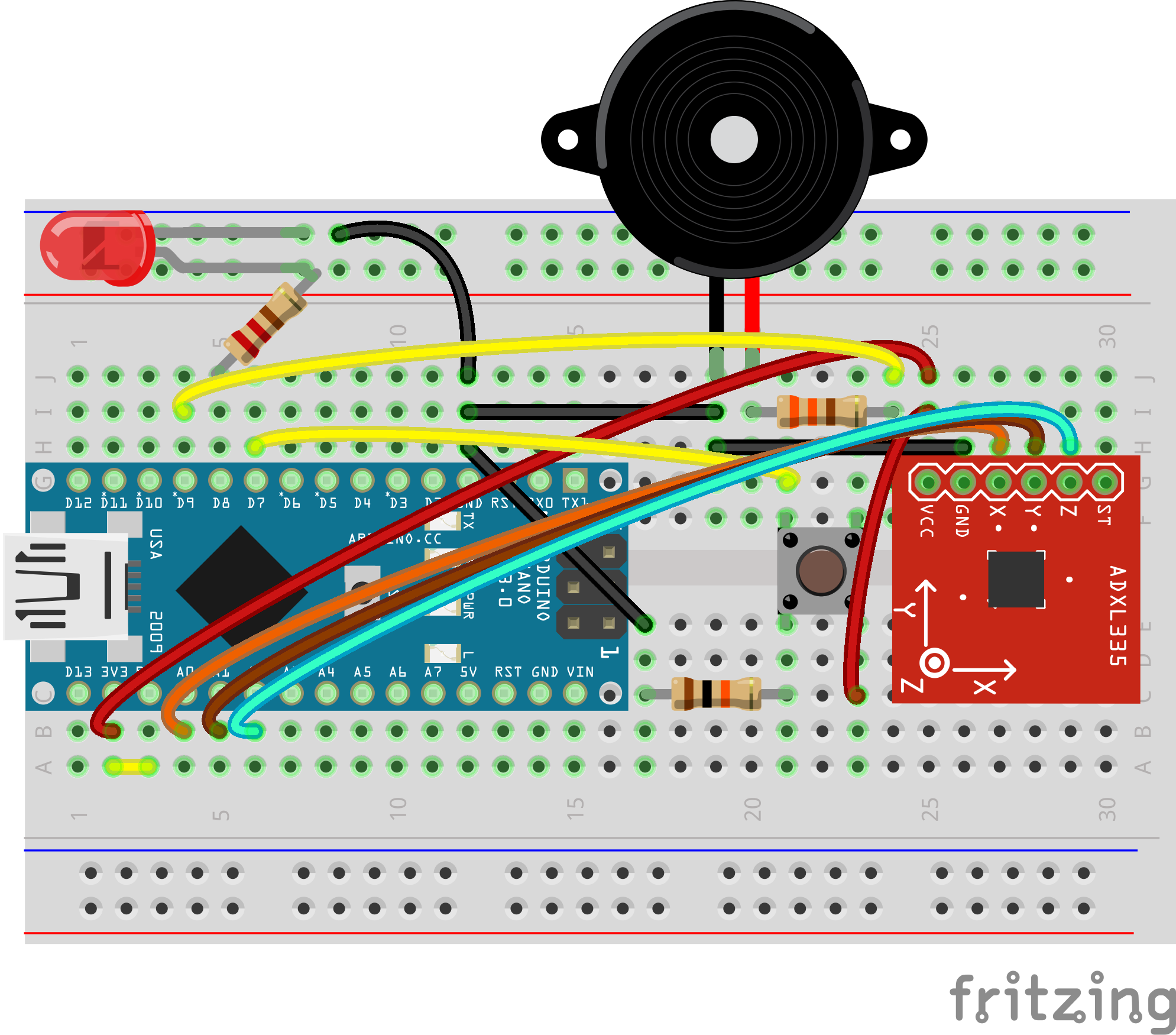
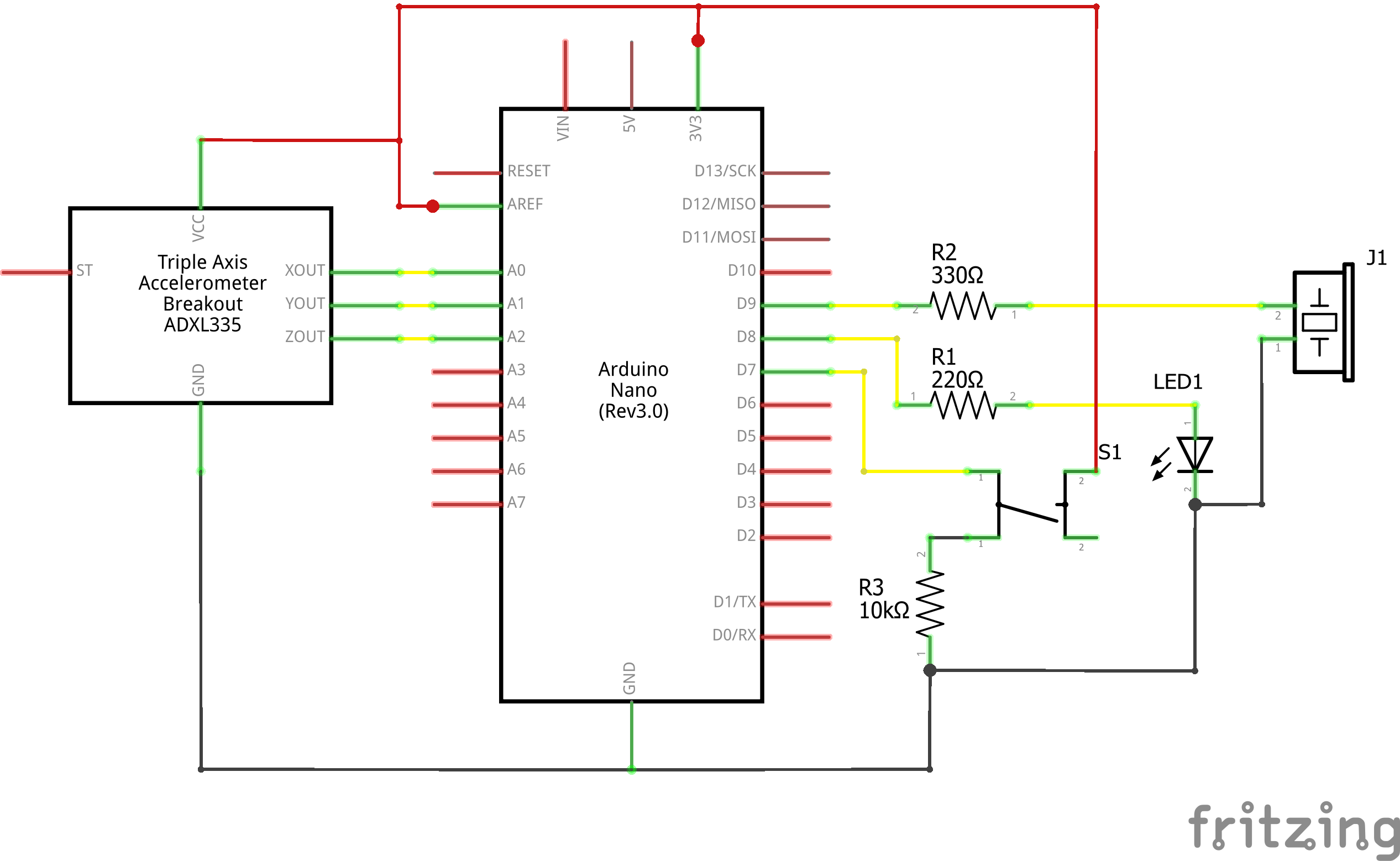
- Arduino Nano
- ADXL335
- Passive Buzzer
- Push button tactile switch
- Red LED
- 220Ohm resistor
- 330Ohm resistor
- 10kOhm resistor
- Breadboard
- Some jumper wires
Created on 26 July 2022 by c010blind3ngineer
*/
int X_axis = A0;
int Y_axis = A1;
int Z_axis = A2;
const int buzzerPin = 9;
const int LEDpin = 8;
const int btnPin = 7;
const int deg_acc = 3;
boolean trigAlarm = false;
int x, y, z;
int STILL[4];
void setup() {
analogReference(EXTERNAL);
pinMode(buzzerPin, OUTPUT);
pinMode(LEDpin, OUTPUT);
pinMode(btnPin, INPUT);
Serial.begin(9600);
while (digitalRead(btnPin) != HIGH) {}
}
void loop() {
if (digitalRead(btnPin) == HIGH) {
Serial.print("Calibrating");
delay(500);
int i = 0; // reset 'i' counter
while (i < 3) { // read XYZ readings 3 times, it also gives the User time to stabilise the device properly
Serial.print(".");
STILL[0] = analogRead(X_axis);
STILL[1] = analogRead(Y_axis);
STILL[2] = analogRead(Z_axis);
delay(500);
i++;
}
digitalWrite(LEDpin, HIGH);
tone(buzzerPin, 2000);
delay(100);
digitalWrite(LEDpin, LOW);
noTone(buzzerPin);
delay(100);
digitalWrite(LEDpin, HIGH);
tone(buzzerPin, 2000);
delay(100);
digitalWrite(LEDpin, LOW);
noTone(buzzerPin);
trigAlarm = false;
}
// Read XYZ axis values
x = analogRead(X_axis);
y = analogRead(Y_axis);
z = analogRead(Z_axis);
// Check to see if the device is in the same position when the User set it initially
if ((x > (STILL[0] - deg_acc)) && (x < (STILL[0] + deg_acc)) && (y > (STILL[1] - deg_acc)) && (y < (STILL[1] + deg_acc)) && (z > (STILL[2] - deg_acc)) && (z < (STILL[2] + deg_acc)) ) {
// You can uncomment the lines below to see the XYZ values in the Serial Monitor
// Serial.print(x);
// Serial.print("\t");
// Serial.print(y);
// Serial.print("\t");
// Serial.print(z);
// Serial.println();
}
else {
trigAlarm = true;
}
// Alarm goes off when someone moves the device out of position
if (trigAlarm == true) {
digitalWrite(LEDpin, HIGH);
tone(buzzerPin, 2000);
delay(100);
digitalWrite(LEDpin, LOW);
noTone(buzzerPin);
}
delay(100);
}






















{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.