/*
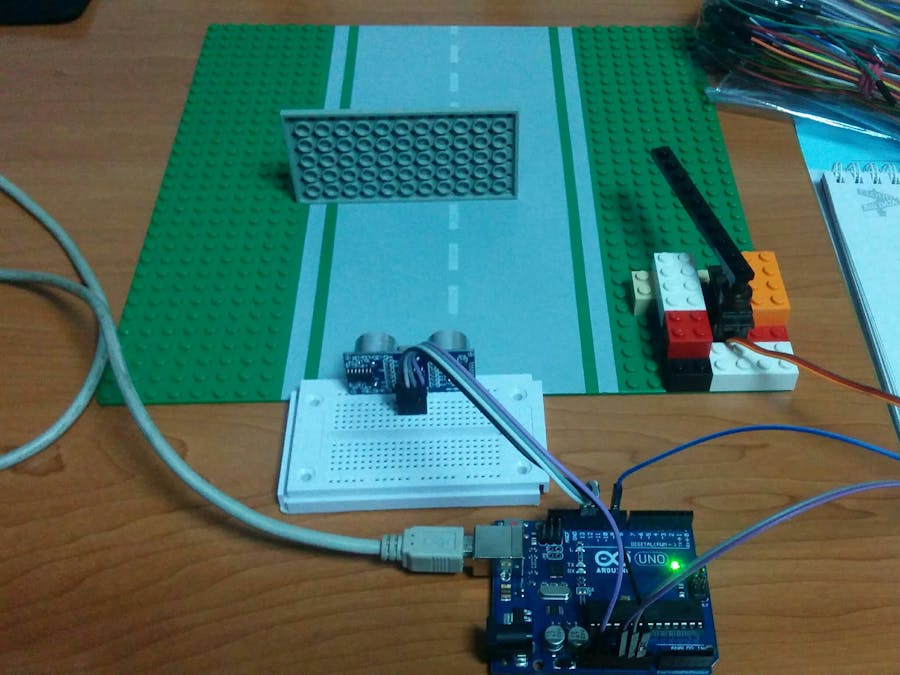
This is a simple example of ultrasonic sensor measurement.
Distance is used to control servo motor.
*/
#include <Servo.h>
Servo myservo; // create servo object to control a servo
// twelve servo objects can be created on most boards
int pos = 0; // variable to store the servo position
#define servoPin 9
#define trigPin 13
#define echoPin 12
#define MIN_DISTANCE 2
#define MAX_DISTANCE 20
#define MIN_ANGLE 0
#define MAX_ANGLE 180
void setup() {
Serial.begin (9600);
myservo.attach(servoPin);
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
}
void loop() {
long duration, distance;
// Make a Ping
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
// Get a pulse measurements in microseconds
duration = pulseIn(echoPin, HIGH);
// Calculate the distance - half of the sound wave path.
// distance = duration / 2 * speed_of_sound
// 340.29 m/s = 1/29.411 cm/us
distance = (duration/2) / 29.411;
if (distance < MAX_DISTANCE && distance > MIN_DISTANCE)
{
Serial.println(distance);
// MIN_DISTANCE cm -> MIN_ANGLE deegrees
// MAX_DISTANCE cm -> MAX_ANGLE deegrees
pos = map(distance, MIN_DISTANCE, MAX_DISTANCE, MIN_ANGLE, MAX_ANGLE);
}
else
{
// if we are getting measurement that dont make sense we will
// put to servo to closer end position.
if(pos < (MAX_ANGLE - MIN_ANGLE)/2)
pos = MIN_ANGLE;
else
pos = MAX_ANGLE;
}
// Update servo position
myservo.write(pos);
delay(10);
}


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)





Comments