



Hardware components | ||||||
 |
| × | 1 | |||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
There are three main reasons why the CoVid-19 virus is so dangerous to human: Its contagious, its deadly and to date there is no vaccine. The only way to absolutely and obviously protect people from the virus contamination is through social distancing or isolation. But these scenarios obliged our front-liners in nursing,comforting,and aiding critical patients and the worst thing is it could compromise their lives. Another conflict of flattening the the curve is the need of our people to go outside to buy foods/basic goods every time they are out of supplies making them vulnerable to Covid-19 disease transmission.
So, to protect our country(third world), we must protect our front liners and we must keep our people from staying home. All these two big problems, if resolved could combat the spread of pandemic(CoVID 19) .Again, prevention is better than Cure ,if vaccine discovery is uncertain or far from reality, then lets not forget that we can defeat virus within 14 days only. Our solution is to build robots with multi-features and capacity. Its a face-off between RANDYBot vs the virus.
The Plan:
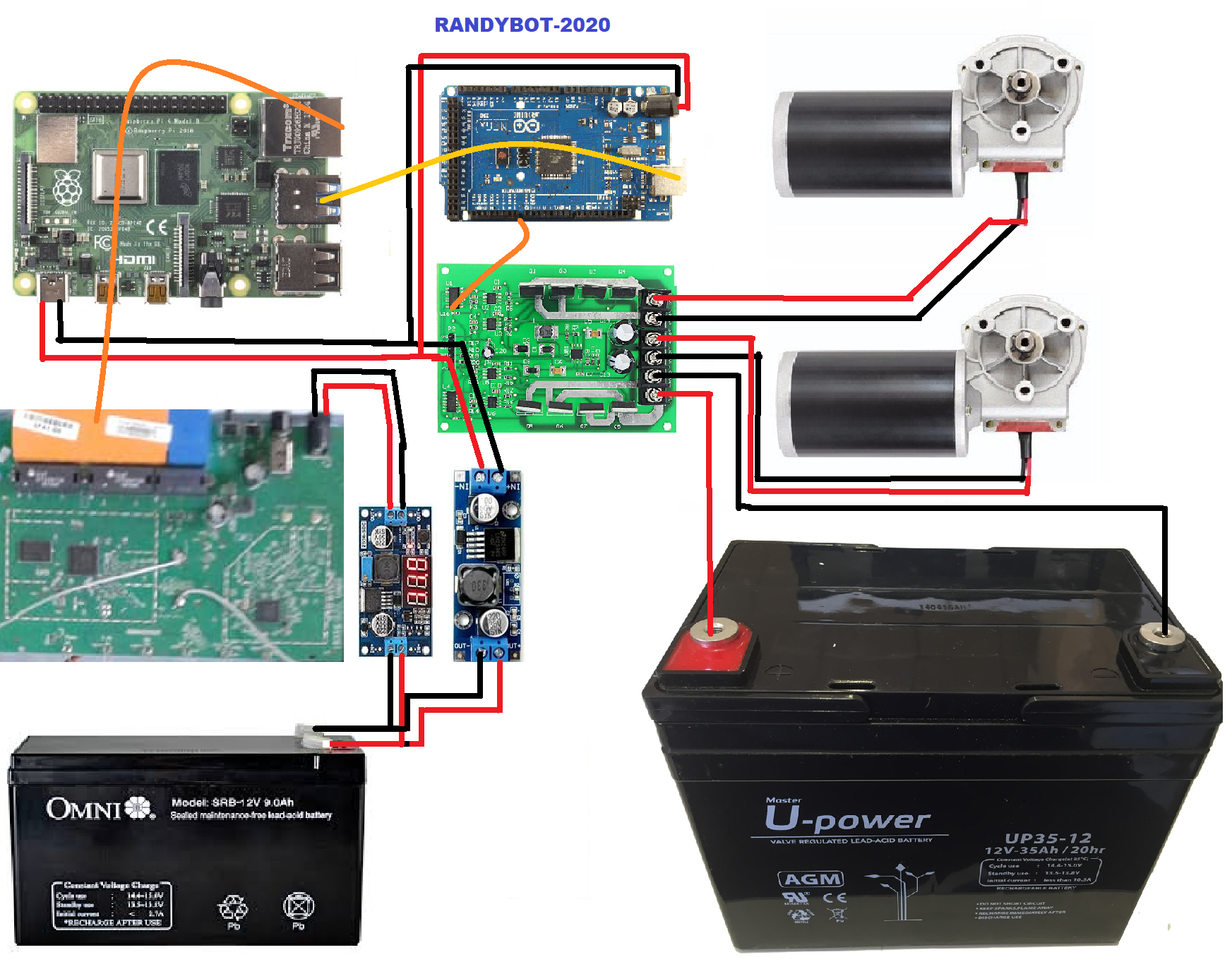
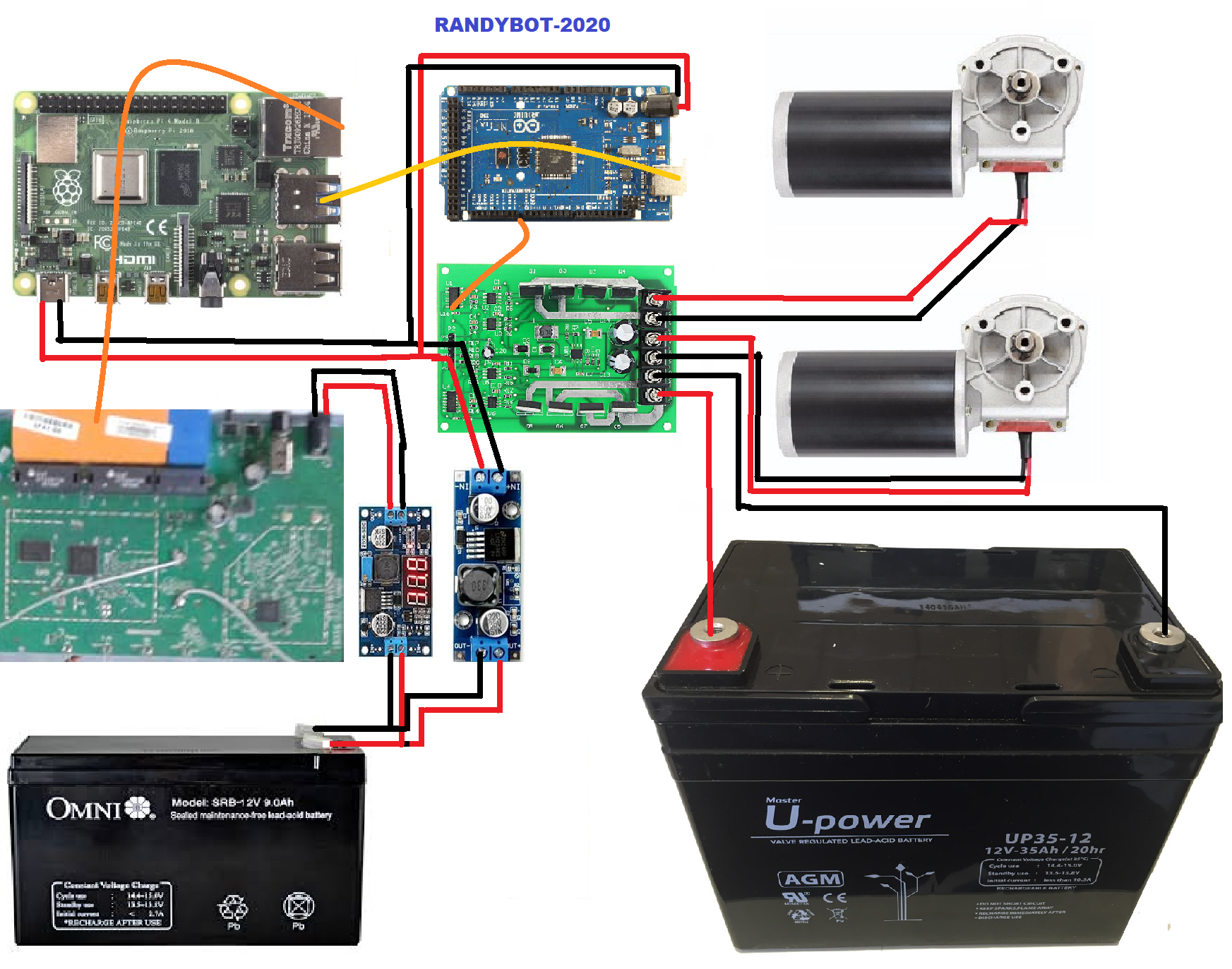
RANDYBot is robust and easy to build as we need to have a quick build during the crisis. It uses free software for remote control and surveillance and low-cost available electronic components to drive its motor.
The Build:
Hardware:The machine could carry heavy load (ex: 100-250Kg) to be precise. The assembly is straight forward. The wheel, the gearing , the mounting and the frame. It is a differential type of mobile robots with two caster wheels at the front The frame is built by locally available T-profile aluminum to be robust and lesser weight.
The robot is integrated with pre-owned prepaid modem-router for its access via internet, the single board computer is Raspberry Pi 4GB loaded with Ubuntu OS . The RPi is connected to a modem and interfaced to a micro-controller. The Arduino Mega(optional) is also connected to the controller to drive the two motors. It uses Logitech web camera and computer tablet for communicating or interacting with the patients.
Software:: The robot is using free downloadable software: zoom for teleconferencing and team-viewer (plus the hackster .io IOT platform) to embedded control of RPi and Arduino Mega. For Web Display it uses node.js (light weight web container), JavaScript with HTML. The machine is efficiently controllable via internet (long distance) and also using local area network (at least 1 km open view).
Please download the source code,instructions and howtos here
Actual load carrying capacity: The robot is able to carry 150kg during the test but can be set up to 250kg. Thus , the machine can deliver goods,sensors and PPE to assist the front-liners.
Functions and Capabilities:
The RANDYBot is capable of doing outdoor and indoor surveillance , monitoring(patrol day and night), can carry rations of foods supplies to communities, those keeping people from staying home.
The robot can assist medical staffs by a routine visit to their patients by just using audio and video conferencing plus it can carry thermal scanners for diagnosing the temperature of confined patients.
The robot can also assist front-liners in check-point areas by carrying thermal cameras for inspecting temperatures of goers and passers. The robot can carry UV lights for disinfecting Covid-19 contaminated areas.In addition, the machine can be disinfected without danger from any chemical harm.
The robot can do a day and night operations,because of strong gearing in the motor, the power source is economized for a duration of almost one (1) week before charging its battery. The robot had achieved excellent transceiver of data (IO),audio,video simultaneously without experiencing signals disruptions/interruptions.
RANDYBOT in action: the robot was deployed in the field during the pandemic crisis. The robot could carry load of goods and capable of surveillance and monitoring the well being of local constituents 3Km to 7Km away from the base station.(my home).
Video credited to the local constituents who received goods and face masks.







{kind=link}
Comments
Please log in or sign up to comment.