


Hardware components | ||||||
| × | 6 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
Covid-19 Virus is in every places, these are all sizes of areas where people dwell: small rooms, wide hospitals, narrow streets, huge gyms and open market. Hence , the vulnerable people are at huge risk to be infected by the Covid-19 virus. The unseen nano beast could stay in the different surfaces for an hours or even days longer.
One reliable solution is disinfection, thus our fight against the disease caused by Covid-19 virus is by cleansing our habitat. We will use robots to carry UV lamps as our disinfectant tools. UV lights is clinically proven and tested to be an efficient means of killing germs and viruses. .However , UV light rays emits 'radiations which is dangerous to humans health.
Therefore, to protect people from risk is also a top priority.The XentrinoBot version UVR2 can do the job well as it features machine vision/AI design,tele-operation ,autonomous or manual controlability and offer high level of safety.
The Plan: As much as possible, humans will be replaced by our robot/s in eradicating the virus. The robot has the capability to safeguard any living things in the surrounding area in anytime or in any circumstances either before , during and after the operation of disinfection.
Addressing safety risks : 1) Before, a failure of a remote control, timer , monitoring of UV radiations.
2)During, a sudden interference of pets,children or animal in the danger zone.
3) After,determining the covered area, the UV lights radiations deactivation and the system's shutdown.
4) A precise elevation and orientations of UV lamps for disinfection precision and safety.
Addressing control-ability:
1)The system need self system checking before the disinfection and dry run ensure safety.
2) The robot should should recognize and protect an object on a sudden interference during the operations and immediately apply safety protocol.
3) The robot should determine the covered area, could disinfect autonomously(ease navigation) or web controlled by the operator.
4) The robot should also control additional reach UV lamps radiation coverage.
Addressing practicability: 1) It should be less mechanical parts.
2) The robot or system is convertible for small or large area use.
3) It is affordable for easy builds and mass productions.
4) The materials should be low cost and locally available,it featured a McRon Lidar..
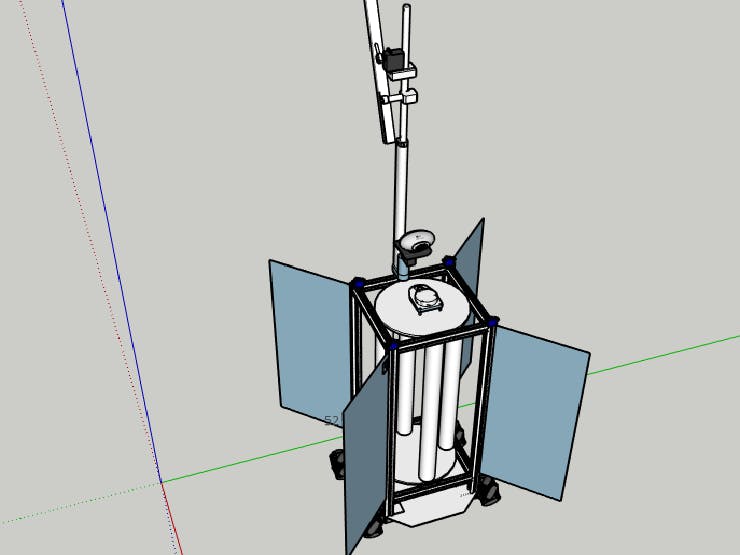
The Design:
The assembly used a 4WD Omniwheel multi-configurable robot using a Hi-Techno Barrio robotics platform. This includes a customized controller that drives the four(4) motors.
Three (3) UV Lamps :
1) Beneath the base of the robot a mini UV lamps are attached.
2) At the surface of the base, a housing frame is mounted. It is a threaded and jointed square of 20 x 20 Aluminum T profile which enclosed the four (4) UV lamps as its housing.
3) Another UV Lamps is being carried by the electrical actuator this can be used to extended the reach of heights such as tables, chairs and other appliances.
1) For small room the robot is convertible to just perform like a vacuum cleaner. The configuration is only the base of the robot with its mini UV lamps.
2) But to a large area coverage the robot can be converted to use the four UV lamps or could be configured to included more lamps.
3) The robot and the power of UV radiations are both scaleable and customizable.
4) The robot disinfection could reach additional heights with focus of light rays precision.
At the top of the frame,in every 90 degrees corner a Servo is mounted to open and close the plywood sheets. Also in its opening a UV light sensors are installed.
The top most part is a mounted lidar annexed to a camera which is fixed in a servo motor.
XentrinoBot-UVR2
Sensors:
MacRon LIDAR ,RPLidar, UV light Sensor (CAD, Design,Assembly and Test Camera Positioning LIDAR)
MacRon LIDAR 360 degrees scanning test.
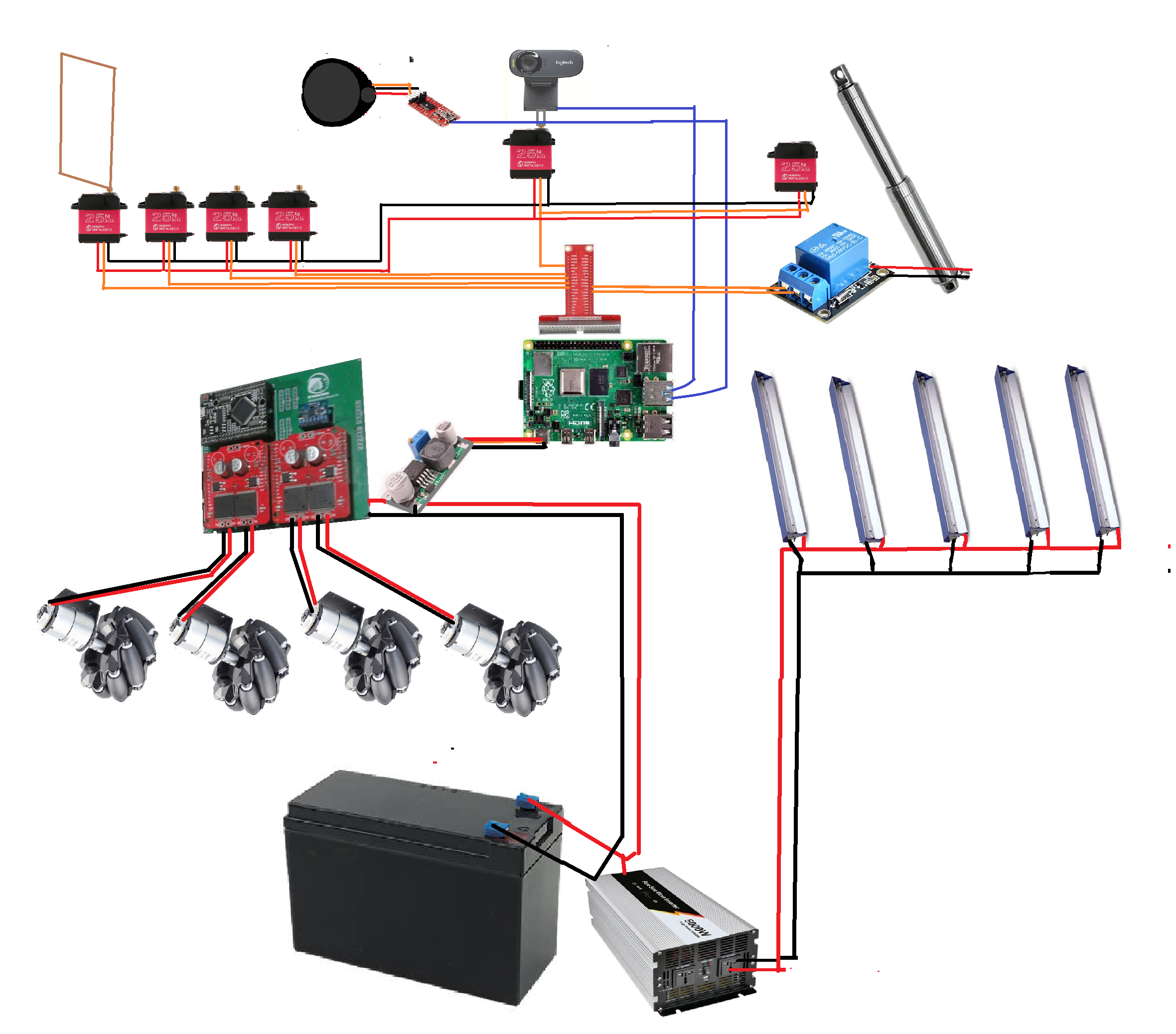
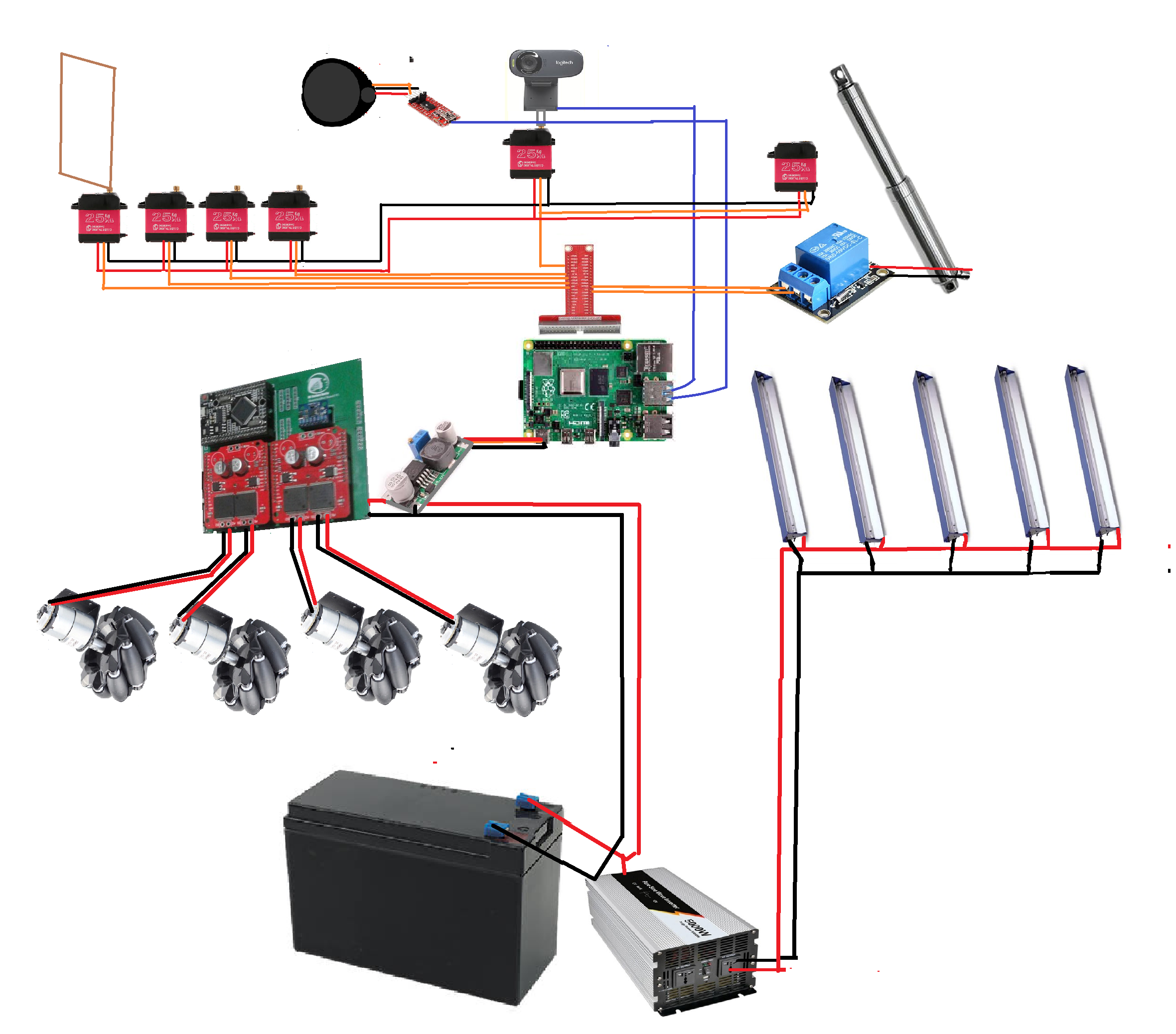
The Build & Assembly:
Hardware: UV fluorescent lamp- tools for Covid-19 disinfection
Mini UV lamps -beneath the base of the robot to cover disinfection on its path
UV light sensor= detect the UV presence of UV lights
Xentrinobot robot platform- General Purpose mobile robotics platform ( Hi-Techno Barrio )
Mechanum/Omni Wheel 4WD- option to omni direction mobile robot
Lidar- Map, Area, Distance scanner
Window shield- opening and closing each segmented sections or the entire passages of UV lights emissions.
Software :
NodeJs, light socket server
HTML- web gui templating
Javascript -Web scripting
Arduino IDE-MCU programming IDE
OpenCV/YOLO- for machine vision (object and face detection)
Design References:
Machine Vision Object Detection
RPi Servo Control w/ Python
RPi Control 4WD Mecanum wheel
RPi LIDAR XV11 scanner
RPi w/ UV Light sensor
RPi ROS Navigation
The Operations:
1)Autonomous, in robot autonomous mode of operation, its system do first self check batteries to ensure power sustainability. Then, sensors ,It sense lidar measurement so that system are able to detect the mealtime presence of an objects. The surrounding distances being fed by the lidar is used to create map. The robot can use this map to navigate as well as to find the center of the area. Doing so, the robot could evenly maximize the emission of light radiations. The system can apply ALCM or Hector SLAM using ROS or just a micro controller embedded SLAM for its autonomous navigation.
2)Safety: The robot operation though autonomous has an extreme safety features. During the disinfection process ,the Lidar is independently scanning the surrounding of area. Any disturbances,motions or physical interference the system(program) is cautious that servo is able to position its camera. The camera is able to grab images to visually identify the cause of changing distance measurement. An machine vision AI (Object ,Face detection and recognition via OpenCV/Yolo) is to verify the object.
If the object is living things , it will immediately close the window sheet that covers the region where UV rays is/are hitting the object. The robot will sends a sounds alarm or blinking lights to keep out the presence of any living things inside the danger zone. The system will alert the operator about the critical situations. Plus to ensure that rays are being covered there is a UV light sensor that will give feedback if the UV rays could still radiates or not. The unique addition of this segmented window shield in the entire covering of the UV lamps is that it can do safety without halting the entire process of disinfection.Thus it can disinfect and protect the utmost level of safety.
3)Controlability, the robot controloability can be assessed by its easy movement as it uses mecanum wheels. This multi directional wheels enables the robot to go anywhere in the area with precise directions and positions. Since an included lidar is feeding a map; the robot could identify and move to a center to efficiently and evenly maximized the lights emission. The robot also able to detect its battery amount of power source and able to display the remaining time for its operations. The operator of a robot can set the time duration of the disinfection the power supply of each UV Lamps.The operator can also control the linear actuator with its servo motor to extend heights and position of UV lights rays disinfection. And the operator can shutdown the entire system either in autonomous or remote controlled mode of operations in times of emergency.
4)Remote Controlled, the robot is remotely controlled via web hosted by a single board computer (RPi4/Jetson Nano). It has a control panel to command robot such as directions, GUI for its SLAM map, monitoring power level and a live remote view of robot in the target area. Plus the robot has an alarm box that is activated during:
1) Object interference
2) Power source outage
3) Detected leak of UV rays (by UV light sensor) during lights disabling.
Findings & Significance:
The results of applying XentrinoBots Ultra Violet Rays Robot(UVR2) is a reliable, affordable and practical to mass produce the robot. Controlability and safety is simply killing efficiently the Covid-19 virus which people are kept away from the risk environment of UV light radiations and Virus infections. The XentrinoBot-UVR2 addresses all the challenges of using mobile robots with UV lamps Covid-19 virus disinfection. The project is opensource and its technology is available online.And also considering that materials included are affordable and locally available.
The disinfection is easy and fast with a wide coverage of touch less to deactivate the virus.And by that we can use and control robots for our safety.
The significance is/are, by uniquely combining the available technology with novel shielding plus Artificial Intelligence, the XentrinoBot UVR2 could efficiently kill the virus at 99%(as clinically proven) and ensure high level of safety ( real time automatic shields ) to 100% protect human lives ( keeping people out from the disinfection risks)
Thank you!
"We will heal as One " Hi-Techno Barrio






{kind=link}
Comments
Please log in or sign up to comment.