



Hardware components | ||||||
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff) |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
1. Introduction
Read moreBionic hands are revolutionizing fields like healthcare and safety. In this project, we developed a system that accurately replicates human hand movements using visual perception technology. The details are outlined below.
2. Components- Arduino Uno
- Servo motors (5 units)
- Camera
- 3D printer
- PLA filament
- Python (OpenCV, MediaPipe, PyFirmata libraries)
- Connection wires
- Screws and assembly tools
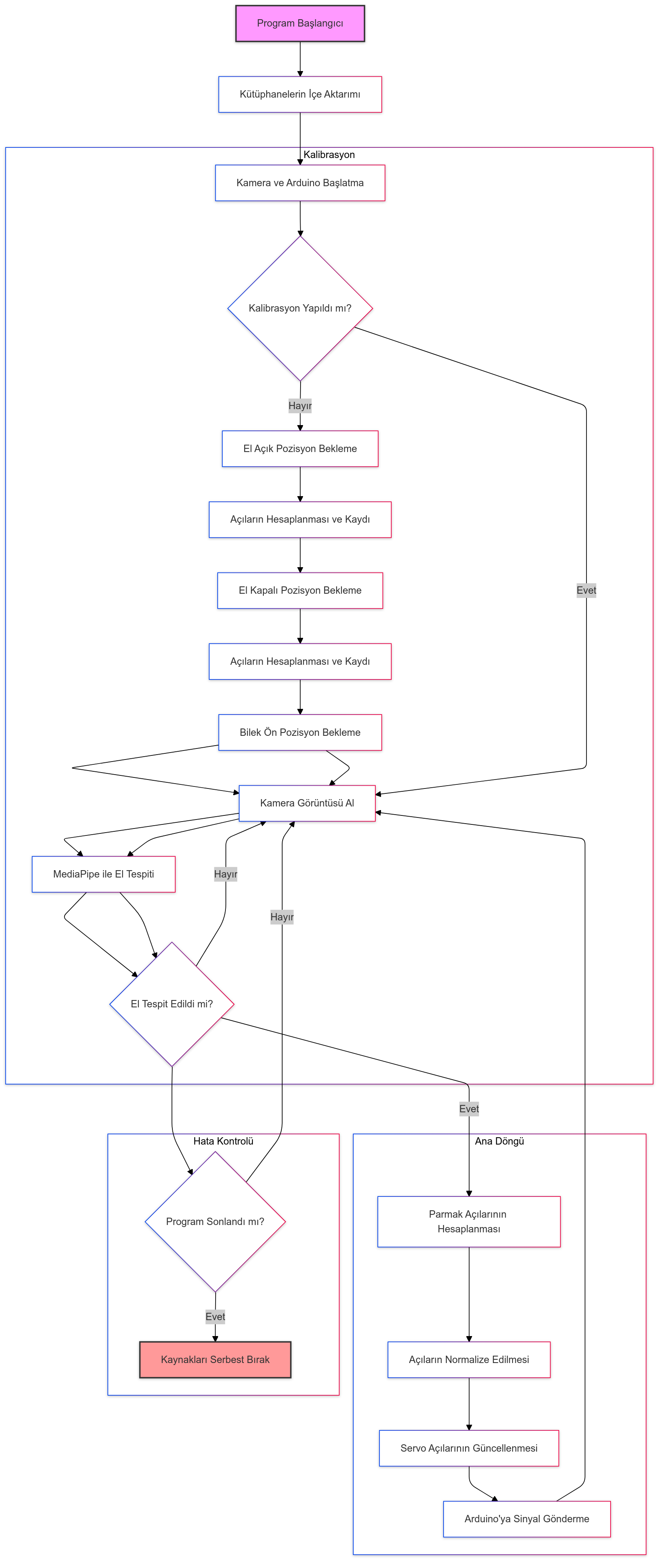
Detecting Hand Movements:
- OpenCV and MediaPipe libraries in Python detect hand movements.
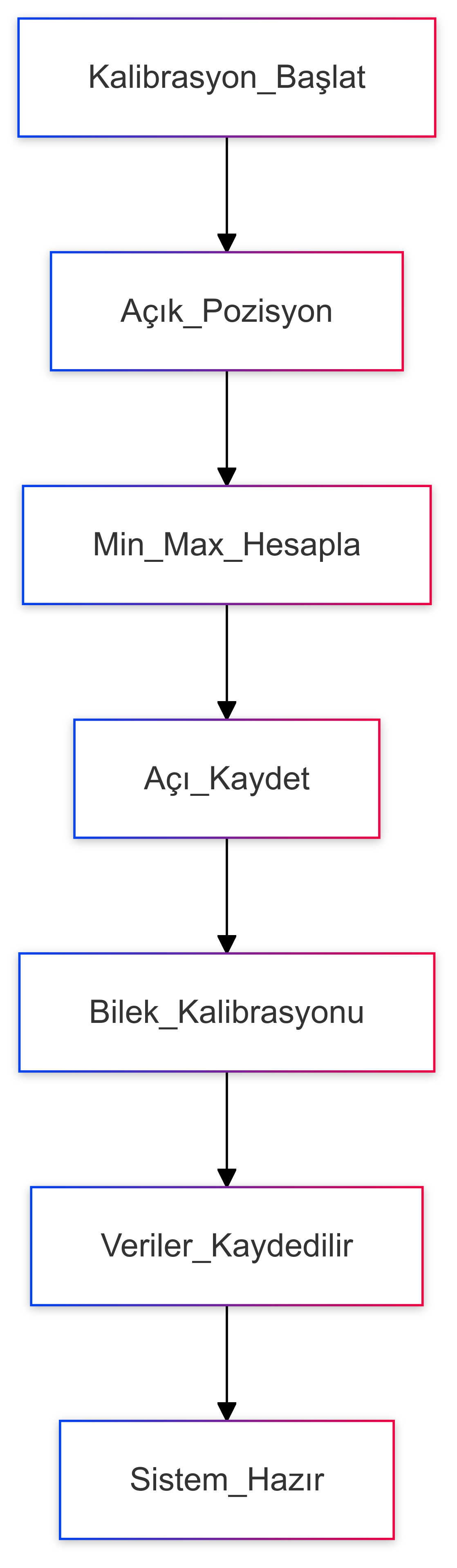
- The system calibrates individual user hand angles for accurate replication.
- Detecting Hand Movements:OpenCV and MediaPipe libraries in Python detect hand movements.The system calibrates individual user hand angles for accurate replication.
Integration with Arduino:
- Data is transferred to the Arduino using the PyFirmata library.
- Servo motors respond to angle values derived from the camera input.
- Integration with Arduino:Data is transferred to the Arduino using the PyFirmata library.Servo motors respond to angle values derived from the camera input.
3D Model and Assembly:
- A 3D hand model downloaded from Thingiverse is printed.
- Servo motors are integrated into the model.
- 3D Model and Assembly:A 3D hand model downloaded from Thingiverse is printed.Servo motors are integrated into the model.
Testing and Calibration:
- The system is tested with various hand movements to evaluate response times and accuracy.
- Testing and Calibration:The system is tested with various hand movements to evaluate response times and accuracy.
You can share the code on GitHub and link it to the Hackster.io page. I can help refine and organize the code for better clarity and presentation.
5. Results and Discussion- The bionic hand successfully replicates human movements.
- It operates with a response time of milliseconds.
- The system is user-friendly, cost-effective, and portable.
- Wireless control integration using Raspberry Pi.
- Adding tactile sensors to enhance sensitivity.
- Using more powerful motors for faster and stronger movements.
- Photos of the 3D-printed model.
- Videos showing the system in action.
- Diagrams and flowcharts explaining the process.
import cv2
import mediapipe as mp
import time
import numpy as np
class elizleyici():
def __init__(self, mode: bool = False, max_hands: int = 2, model_complexity: int = 1,
detection_confidence: float = 0.9, tracking_confidence: float = 0.9):
self.mode = mode
self.max_hands = max_hands
self.model_complexity = model_complexity
self.detection_confidence = detection_confidence
self.tracking_confidence = tracking_confidence
self.mp_hands = mp.solutions.hands
self.hands = self.mp_hands.Hands(self.mode, self.max_hands, self.model_complexity,
self.detection_confidence, self.tracking_confidence)
self.mp_draw = mp.solutions.drawing_utils
self.tip_ids = [4, 8, 12, 16, 20] # Parmak ularnn landmark ID'leri
def find_hands(self, img, draw: bool = True) -> cv2.Mat:
img_rgb = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
self.results = self.hands.process(img_rgb)
if self.results.multi_hand_landmarks:
for hand_lms in self.results.multi_hand_landmarks:
if draw:
self.mp_draw.draw_landmarks(img, hand_lms, self.mp_hands.HAND_CONNECTIONS)
return img
def find_position(self, img, hand_no: int = 0, draw: bool = True) -> list:
lm_list = []
if self.results.multi_hand_landmarks:
my_hand = self.results.multi_hand_landmarks[hand_no]
for id, lm in enumerate(my_hand.landmark):
h, w, c = img.shape
cx, cy = int(lm.x * w), int(lm.y * h)
lm_list.append([id, cx, cy])
if draw:
cv2.circle(img, (cx, cy), 5, (255, 0, 255), cv2.FILLED)
return lm_list
def fingers_up(self, lm_list) -> list:
fingers = []
if len(lm_list) == 0:
return fingers
# Baparmak
if lm_list[self.tip_ids[0]][1] > lm_list[self.tip_ids[0] - 1][1]:
fingers.append(1)
else:
fingers.append(0)
# 4 parmak
for id in range(1, 5):
if lm_list[self.tip_ids[id]][2] < lm_list[self.tip_ids[id] - 2][2]:
fingers.append(1)
else:
fingers.append(0)
return fingers
def get_hand_center(self, lm_list) -> tuple:
if len(lm_list) == 0:
return None
x_coords = [lm[1] for lm in lm_list]
y_coords = [lm[2] for lm in lm_list]
center_x = int(np.mean(x_coords))
center_y = int(np.mean(y_coords))
return (center_x, center_y)
def main():
p_time = 0
c_time = 0
cap = cv2.VideoCapture(0)
detector = elizleyici()
while True:
success, img = cap.read()
img = detector.find_hands(img)
lm_list = detector.find_position(img)
if len(lm_list) != 0:
fingers = detector.fingers_up(lm_list)
print(f"Fingers up: {fingers}")
center = detector.get_hand_center(lm_list)
if center:
cv2.circle(img, center, 8, (0, 255, 0), cv2.FILLED)
cv2.putText(img, f"Center: {center}", (10, 120), cv2.FONT_HERSHEY_PLAIN, 1, (0, 255, 0), 2)
c_time = time.time()
fps = 1 / (c_time - p_time)
p_time = c_time
cv2.putText(img, f"FPS: {int(fps)}", (10, 70), cv2.FONT_HERSHEY_PLAIN, 3, (255, 0, 255), 3)
cv2.imshow("Image", img)
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
main()
import cv2
import numpy as np
import ElizlemeUnitesi as eiu
import pyfirmata2
import time
import json
import tkinter as tk
from tkinter import simpledialog, ttk
import serial.tools.list_ports
class EnhancedCalibration:
def __init__(self, port):
self.servo_controller = None
self.port = port
self.detector = eiu.elizleyici(detection_confidence=0.9)
self.calibration_data = {"min": [], "max": [], "wrist": {"min_length": None, "max_length": None}}
self.calibrated = False
self.servo_angles = {
"basparmak": 90,
"isaretparmak": 90,
"ortaparmak": 90,
"yuzukparmak": 90,
"serceparmak": 90,
"bilek": 90
}
self.saved_once = False
self.wrist_last_update = time.time()
def setup_servo_controller(self):
self.servo_controller = pyfirmata2.Arduino(self.port)
self.servo_pins = {
"basparmak": self.servo_controller.get_pin("d:3:s"),
"isaretparmak": self.servo_controller.get_pin("d:5:s"),
"ortaparmak": self.servo_controller.get_pin("d:6:s"),
"yuzukparmak": self.servo_controller.get_pin("d:9:s"),
"serceparmak": self.servo_controller.get_pin("d:10:s"),
"bilek": self.servo_controller.get_pin("d:11:s")
}
print("Servo controller initialized")
def display_instructions(self, img, message, y_offset=30):
lines = message.split("\n")
for i, line in enumerate(lines):
cv2.putText(img, line, (10, y_offset + i * 30), cv2.FONT_HERSHEY_SIMPLEX, 1, (0, 255, 0), 2)
def collect_calibration_data(self, lm_list, mode):
if not lm_list:
return False
if mode == "wrist_min":
length = np.linalg.norm(np.array(lm_list[4][1:]) - np.array(lm_list[20][1:]))
self.calibration_data["wrist"]["min_length"] = length
elif mode == "wrist_max":
length = np.linalg.norm(np.array(lm_list[4][1:]) - np.array(lm_list[20][1:]))
self.calibration_data["wrist"]["max_length"] = length
elif mode in ["min", "max"]:
finger_lengths = [
np.linalg.norm(np.array(lm_list[4][1:]) - np.array(lm_list[0][1:])),
np.linalg.norm(np.array(lm_list[8][1:]) - np.array(lm_list[0][1:])),
np.linalg.norm(np.array(lm_list[12][1:]) - np.array(lm_list[0][1:])),
np.linalg.norm(np.array(lm_list[16][1:]) - np.array(lm_list[0][1:])),
np.linalg.norm(np.array(lm_list[20][1:]) - np.array(lm_list[0][1:]))
]
self.calibration_data[mode] = finger_lengths
return True
def save_calibration(self):
if not self.saved_once:
with open("calibration_data.json", "w") as file:
json.dump(self.calibration_data, file)
print("Calibration data saved to calibration_data.json")
self.saved_once = True
def clear_calibration_data(self):
self.calibration_data = {"min": [], "max": [], "wrist": {"min_length": None, "max_length": None}}
with open("calibration_data.json", "w") as file:
json.dump(self.calibration_data, file)
print("Calibration data cleared")
self.saved_once = False
def calculate_wrist_angle(self, lm_list):
if not self.calibration_data["wrist"]["min_length"] or not self.calibration_data["wrist"]["max_length"]:
return 90
current_time = time.time()
length = np.linalg.norm(np.array(lm_list[4][1:]) - np.array(lm_list[20][1:]))
thumb_y_diff = abs(lm_list[4][2] - lm_list[0][2]) # Difference in Y-axis for thumb movement
if thumb_y_diff > 20: # Threshold for thumb movement
if current_time - self.wrist_last_update < 1: # Add a delay for wrist updates
return self.servo_angles["bilek"] # Maintain current angle
angle = np.interp(
length,
[self.calibration_data["wrist"]["min_length"], self.calibration_data["wrist"]["max_length"]],
[0, 180]
)
self.wrist_last_update = current_time # Update last wrist adjustment time
return angle
def update_servo_angles(self, lm_list):
if not lm_list or not self.calibrated:
return
finger_lengths = [
np.linalg.norm(np.array(lm_list[4][1:]) - np.array(lm_list[0][1:])),
np.linalg.norm(np.array(lm_list[8][1:]) - np.array(lm_list[0][1:])),
np.linalg.norm(np.array(lm_list[12][1:]) - np.array(lm_list[0][1:])),
np.linalg.norm(np.array(lm_list[16][1:]) - np.array(lm_list[0][1:])),
np.linalg.norm(np.array(lm_list[20][1:]) - np.array(lm_list[0][1:]))
]
finger_names = ["basparmak", "isaretparmak", "ortaparmak", "yuzukparmak", "serceparmak"]
for i, length in enumerate(finger_lengths):
if self.calibration_data['min'] and self.calibration_data['max']:
angle = np.interp(length, [self.calibration_data['min'][i], self.calibration_data['max'][i]], [0, 180])
self.servo_angles[finger_names[i]] = angle
self.servo_angles["bilek"] = self.calculate_wrist_angle(lm_list)
def display_servo_angles(self, img):
y_offset = 400
for name, angle in self.servo_angles.items():
cv2.putText(img, f"{name}: {angle:.1f}", (10, y_offset), cv2.FONT_HERSHEY_SIMPLEX, 1, (255, 0, 0), 2)
y_offset += 30
def update_servos(self):
for name, angle in self.servo_angles.items():
if name in self.servo_pins:
self.servo_pins[name].write(angle)
def run_calibration(self):
cap = cv2.VideoCapture(0)
cap.set(cv2.CAP_PROP_FRAME_WIDTH, 1280)
cap.set(cv2.CAP_PROP_FRAME_HEIGHT, 720)
if not cap.isOpened():
print("Failed to access camera")
return
calibration_mode = None
start_time = None
while True:
ret, img = cap.read()
if not ret:
print("Failed to capture frame")
continue
img = self.detector.find_hands(img)
lm_list = self.detector.find_position(img, draw=True)
if calibration_mode is not None:
if calibration_mode == 'open':
self.display_instructions(img, "Open your hand and hold steady\nCalibration will start in 2 seconds")
if start_time is None:
start_time = time.time()
elif time.time() - start_time >= 2:
if self.collect_calibration_data(lm_list, 'max'):
self.display_instructions(img, "Open hand calibration is complete", y_offset=120)
time.sleep(2)
calibration_mode = None
start_time = None
elif calibration_mode == 'close':
self.display_instructions(img, "Close your hand and hold steady\nCalibration will start in 2 seconds")
if start_time is None:
start_time = time.time()
elif time.time() - start_time >= 2:
if self.collect_calibration_data(lm_list, 'min'):
self.display_instructions(img, "Close hand calibration is complete", y_offset=120)
time.sleep(2)
calibration_mode = None
start_time = None
elif calibration_mode == 'wrist_min':
self.display_instructions(img, "Turn your wrist to the minimum position\nCalibration will start in 2 seconds")
if start_time is None:
start_time = time.time()
elif time.time() - start_time >= 2:
if self.collect_calibration_data(lm_list, 'wrist_min'):
self.display_instructions(img, "Wrist minimum calibration is complete", y_offset=120)
time.sleep(2)
calibration_mode = None
start_time = None
elif calibration_mode == 'wrist_max':
self.display_instructions(img, "Turn your wrist to the maximum position\nCalibration will start in 2 seconds")
if start_time is None:
start_time = time.time()
elif time.time() - start_time >= 2:
if self.collect_calibration_data(lm_list, 'wrist_max'):
self.display_instructions(img, "Wrist maximum calibration is complete", y_offset=120)
time.sleep(2)
calibration_mode = None
start_time = None
if len(self.calibration_data['min']) and len(self.calibration_data['max']):
self.calibrated = True
self.save_calibration()
else:
self.display_instructions(img, "Press 'o' for open calibration\nPress 'c' for close calibration\nPress 's' to reset calibration\nPress 'm' for wrist minimum calibration\nPress 'x' for wrist maximum calibration")
if self.calibrated:
self.update_servo_angles(lm_list)
self.update_servos()
self.display_servo_angles(img)
cv2.imshow("Calibration", img)
key = cv2.waitKey(1) & 0xFF
if key == ord('o'):
calibration_mode = 'open'
start_time = None
self.saved_once = False
elif key == ord('c'):
calibration_mode = 'close'
start_time = None
self.saved_once = False
elif key == ord('s'):
self.clear_calibration_data()
self.display_instructions(img, "Calibration data cleared", y_offset=120)
time.sleep(2)
elif key == ord('m'):
calibration_mode = 'wrist_min'
start_time = None
self.saved_once = False
elif key == ord('x'):
calibration_mode = 'wrist_max'
start_time = None
self.saved_once = False
elif key == ord('q'):
break
cap.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
root = tk.Tk()
root.title("Select Arduino Port")
ports = [port.device for port in serial.tools.list_ports.comports()]
if not ports:
print("No COM ports found. Exiting.")
root.destroy()
exit()
selected_port = tk.StringVar(value=ports[0])
def on_confirm():
root.destroy()
ttk.Label(root, text="Select Arduino Port:").pack(pady=10)
port_menu = ttk.Combobox(root, textvariable=selected_port, values=ports, state="readonly")
port_menu.pack(pady=5)
ttk.Button(root, text="Confirm", command=on_confirm).pack(pady=10)
root.mainloop()
port = selected_port.get()
if port:
calibrator = EnhancedCalibration(port)
calibrator.setup_servo_controller()
calibrator.run_calibration()
else:
print("No port selected. Exiting.")








{kind=link}
{kind=link}
Comments
Please log in or sign up to comment.