





Hardware components | ||||||
 |
| × | 2 | |||
 |
| × | 2 | |||
 |
| × | 4 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
Software apps and online services | ||||||
 |
| |||||
Hand tools and fabrication machines | ||||||
 |
| |||||
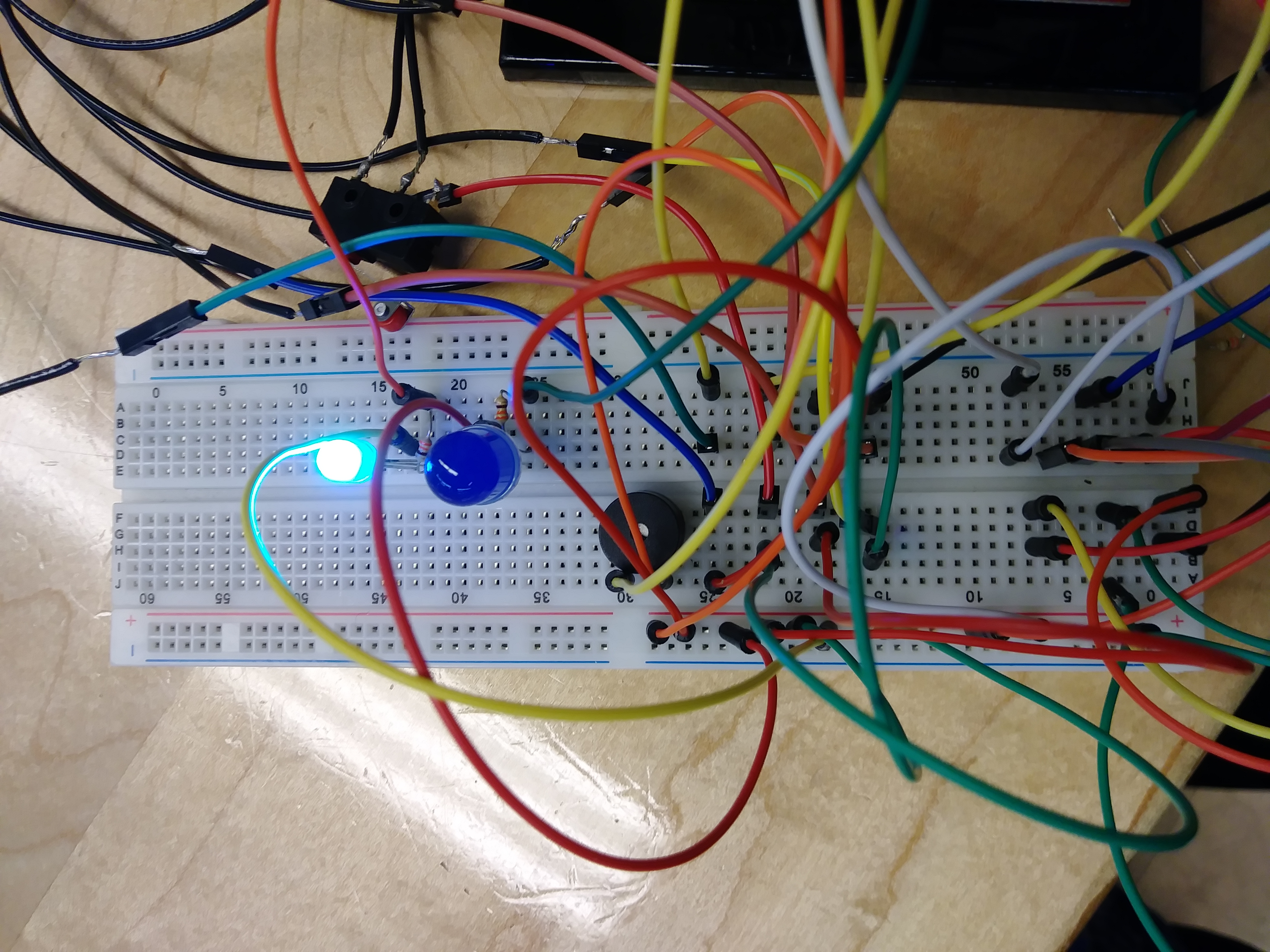
The electronic hammer bench incorporates the development of human motor skills and exciting lights with sound. We decided to create the hammer bench after looking through classic toys that did not include electronic components. We wanted to modify this toy by adding buttons that resemble "nails" which play musical tones after you hit them with the hammer. The bench will be made of a plastic 10X5X5 box that has a hammer attached by a string. We are using four limit switches that play tones when hit by the hammer. We will also have two rotary encoders (R.E.) aligned with the limit switches. One R.E. will switch between two colors using its potentiometer. The other R.E. will dim/brighten an RGB LED. When it is pressed, it can turn on a blue LED.
All Code
Javastatic int pinB = 3; // Our second hardware interrupt pin is digital pin 3
volatile byte aFlag = 0; // let's us know when we're expecting a rising edge on pinA to signal that the encoder has arrived at a detent
volatile byte bFlag = 0; // let's us know when we're expecting a rising edge on pinB to signal that the encoder has arrived at a detent (opposite direction to when aFlag is set)
volatile byte encoderPos = 0; //this variable stores our current value of encoder position. Change to int or uin16_t instead of byte if you want to record a larger range than 0-255
volatile byte oldEncPos = 0; //stores the last encoder position value so we can compare to the current reading and see if it has changed (so we know when to print to the serial monitor)
volatile byte reading = 0; //somewhere to store the direct values we read from our interrupt pins before checking to see if we have moved a whole detent
// Button reading, including debounce without delay function declarations
const byte buttonPin = 4; // this is the Arduino pin we are connecting the push button to
byte oldButtonState = HIGH; // assume switch open because of pull-up resistor
const unsigned long debounceTime = 10; // milliseconds
unsigned long buttonPressTime; // when the switch last changed state
boolean buttonPressed = 0; // a flag variable
// Menu and submenu/setting declarations
byte Mode = 0; // This is which menu mode we are in at any given time (top level or one of the submenus)
const byte modeMax = 3; // This is the number of submenus/settings you want
byte setting1 = 0; // a variable which holds the value we set
byte setting2 = 0; // a variable which holds the value we set
byte setting3 = 0; // a variable which holds the value we set
/* Note: you may wish to change settingN etc to int, float or boolean to suit your application.
Remember to change "void setAdmin(byte name,*BYTE* setting)" to match and probably add some
"modeMax"-type overflow code in the "if(Mode == N && buttonPressed)" section*/
const int buttonPin2 = 7; // the number of the pushbutton pin
const int buttonPin3 = 12; // the number of the pushbutton pin
const int buttonPin4 = 8; // the number of the pushbutton pin
const int buttonPin5 = 13; // the number of the pushbutton pin
const int Buzzer1 = 10;
// variables will change:
int buttonState2 = 0; // variable for reading the pushbutton status
int buttonState3 = 0; // variable for reading the pushbutton status
int buttonState4 = 0; // variable for reading the pushbutton status
int buttonState5 = 0; // variable for reading the pushbutton status
void setup() {
//Rotary encoder section of setup
pinMode(pinA, INPUT_PULLUP); // set pinA as an input, pulled HIGH to the logic voltage (5V or 3.3V for most cases)
pinMode(pinB, INPUT_PULLUP); // set pinB as an input, pulled HIGH to the logic voltage (5V or 3.3V for most cases)
attachInterrupt(0,PinA,RISING); // set an interrupt on PinA, looking for a rising edge signal and executing the "PinA" Interrupt Service Routine (below)
attachInterrupt(1,PinB,RISING); // set an interrupt on PinB, looking for a rising edge signal and executing the "PinB" Interrupt Service Routine (below)
// button section of setup
pinMode (buttonPin, INPUT_PULLUP); // setup the button pin
// DEBUGGING section of setup
Serial.begin(9600); // DEBUGGING: opens serial port, sets data rate to 9600 bps
pinMode(11, OUTPUT);
pinMode(9, OUTPUT);
pinMode(6, OUTPUT);
// initialize the piezo as output:
pinMode(Buzzer1, OUTPUT);
// initialize the pushbutton pin as an input:
pinMode(buttonPin2, INPUT_PULLUP);
pinMode(buttonPin3, INPUT_PULLUP);
pinMode(buttonPin4, INPUT_PULLUP);
pinMode(buttonPin5, INPUT_PULLUP);
}
void loop() {
rotaryMenu();
// carry out other loop code here
// initialize the piezo as output:
}
void rotaryMenu() { //This handles the bulk of the menu functions without needing to install/include/compile a menu library
//DEBUGGING: Rotary encoder update display if turned
if(oldEncPos != encoderPos) { // DEBUGGING
Serial.println(encoderPos);
analogWrite(9,encoderPos);
// DEBUGGING. Sometimes the serial monitor may show a value just outside modeMax due to this function. The menu shouldn't be affected.
oldEncPos = encoderPos;// DEBUGGING
}// DEBUGGING
// Button reading with non-delay() debounce - thank you Nick Gammon!
byte buttonState = digitalRead (buttonPin);
if (buttonState != oldButtonState){
if (millis () - buttonPressTime >= debounceTime){ // debounce
buttonPressTime = millis (); // when we closed the switch
oldButtonState = buttonState; // remember for next time
if (buttonState == LOW){
//Serial.println ("Button closed"); // DEBUGGING: print that button has been closed
buttonPressed = 1;
}
else {
//Serial.println ("Button opened"); // DEBUGGING: print that button has been opened
buttonPressed = 0;
}
} // end if debounce time up
//////////
} // end of state change
//Main menu section
const int Mode = 3;
if (Mode == 0) {
if (encoderPos > (modeMax+10)) encoderPos = modeMax; // check we haven't gone out of bounds below 0 and correct if we have
else if (encoderPos > modeMax) encoderPos = 0; // check we haven't gone out of bounds above modeMax and correct if we have
if (buttonPressed){
//Mode = encoderPos; // set the Mode to the current value of input if button has been pressed
Serial.print("Mode selected: "); //DEBUGGING: print which mode has been selected
Serial.println(Mode); //DEBUGGING: print which mode has been selected
buttonPressed = 0; // reset the button status so one press results in one action
if (Mode == 3) {
Serial.println("Mode 3"); //DEBUGGING: print which mode has been selected
encoderPos = setting3; // start adjusting Vmin from last set point
}
}
}
if (Mode == 3 && buttonPressed){
setting3 = encoderPos; // record whatever value your encoder has been turned to, to setting 3
digitalWrite(11,HIGH);
delay(100);
digitalWrite(11,LOW);
//setAdmin(3,setting3);
}
if(Mode==3){
buttonState2 = digitalRead(buttonPin2);
buttonState3 = digitalRead(buttonPin3);
buttonState4 = digitalRead(buttonPin4);
buttonState5 = digitalRead(buttonPin5);
//Serial.println(buttonState4);
// check if the pushbutton is pressed.
// if it is, the buttonState is HIGH:
if (buttonState2 == LOW) {
tone(Buzzer1,784,200);
//note G5
}
if (buttonState3 == LOW) {
tone(Buzzer1,349,200);
//note F4
}
if (buttonState4 == LOW) {
tone(Buzzer1,523,200);
// note C5
}
if (buttonState5 == LOW) {
tone(Buzzer1,330,200);
//note E4
}
}
}
// Carry out common activities each time a setting is changed
void setAdmin(byte name, byte setting){
Serial.print(" button pressed "); //DEBUGGING
encoderPos = 0; // reorientate the menu index - optional as we have overflow check code elsewhere
buttonPressed = 0; // reset the button status so one press results in one action
Mode = 3; // go back to top level of menu, now that we've set values
}
//Rotary encoder interrupt service routine for one encoder pin
void PinA(){
cli(); //stop interrupts happening before we read pin values
reading = PIND & 0xC; // read all eight pin values then strip away all but pinA and pinB's values
if(reading == B00001100 && aFlag) { //check that we have both pins at detent (HIGH) and that we are expecting detent on this pin's rising edge
encoderPos --; //decrement the encoder's position count
bFlag = 0; //reset flags for the next turn
aFlag = 0; //reset flags for the next turn
}
else if (reading == B00000100) bFlag = 1; //signal that we're expecting pinB to signal the transition to detent from free rotation
sei(); //restart interrupts
}
//Rotary encoder interrupt service routine for the other encoder pin
void PinB(){
cli(); //stop interrupts happening before we read pin values
reading = PIND & 0xC; //read all eight pin values then strip away all but pinA and pinB's values
if (reading == B00001100 && bFlag) { //check that we have both pins at detent (HIGH) and that we are expecting detent on this pin's rising edge
encoderPos ++; //increment the encoder's position count
bFlag = 0; //reset flags for the next turn
aFlag = 0; //reset flags for the next turn
}
else if (reading == B00001000) aFlag = 1; //signal that we're expecting pinA to signal the transition to detent from free rotation
sei(); //restart interrupts
}
static int pinA = 2; // Our first hardware interrupt pin is digital pin 2
static int pinB = 3; // Our second hardware interrupt pin is digital pin 3
volatile byte aFlag = 0; // let's us know when we're expecting a rising edge on pinA to signal that the encoder has arrived at a detent
volatile byte bFlag = 0; // let's us know when we're expecting a rising edge on pinB to signal that the encoder has arrived at a detent (opposite direction to when aFlag is set)
volatile byte encoderPos = 0; //this variable stores our current value of encoder position. Change to int or uin16_t instead of byte if you want to record a larger range than 0-255
volatile byte oldEncPos = 0; //stores the last encoder position value so we can compare to the current reading and see if it has changed (so we know when to print to the serial monitor)
volatile byte reading = 0; //somewhere to store the direct values we read from our interrupt pins before checking to see if we have moved a whole detent
// Button reading, including debounce without delay function declarations
const byte buttonPin = 4; // this is the Arduino pin we are connecting the push button to
byte oldButtonState = HIGH; // assume switch open because of pull-up resistor
const unsigned long debounceTime = 10; // milliseconds
unsigned long buttonPressTime; // when the switch last changed state
boolean buttonPressed = 0; // a flag variable
// Menu and submenu/setting declarations
byte Mode = 0; // This is which menu mode we are in at any given time (top level or one of the submenus)
const byte modeMax = 3; // This is the number of submenus/settings you want
byte setting1 = 0; // a variable which holds the value we set
byte setting2 = 0; // a variable which holds the value we set
byte setting3 = 0; // a variable which holds the value we set
/* Note: you may wish to change settingN etc to int, float or boolean to suit your application.
Remember to change "void setAdmin(byte name,*BYTE* setting)" to match and probably add some
"modeMax"-type overflow code in the "if(Mode == N && buttonPressed)" section*/
const int buttonPin2 = 7; // the number of the pushbutton pin
const int buttonPin3 = 12; // the number of the pushbutton pin
const int buttonPin4 = 8; // the number of the pushbutton pin
const int buttonPin5 = 13; // the number of the pushbutton pin
const int Buzzer1 = 10;
// variables will change:
int buttonState2 = 0; // variable for reading the pushbutton status
int buttonState3 = 0; // variable for reading the pushbutton status
int buttonState4 = 0; // variable for reading the pushbutton status
int buttonState5 = 0; // variable for reading the pushbutton status
void setup() {
//Rotary encoder section of setup
pinMode(pinA, INPUT_PULLUP); // set pinA as an input, pulled HIGH to the logic voltage (5V or 3.3V for most cases)
pinMode(pinB, INPUT_PULLUP); // set pinB as an input, pulled HIGH to the logic voltage (5V or 3.3V for most cases)
attachInterrupt(0,PinA,RISING); // set an interrupt on PinA, looking for a rising edge signal and executing the "PinA" Interrupt Service Routine (below)
attachInterrupt(1,PinB,RISING); // set an interrupt on PinB, looking for a rising edge signal and executing the "PinB" Interrupt Service Routine (below)
// button section of setup
pinMode (buttonPin, INPUT_PULLUP); // setup the button pin
// DEBUGGING section of setup
Serial.begin(9600); // DEBUGGING: opens serial port, sets data rate to 9600 bps
pinMode(11, OUTPUT);
pinMode(9, OUTPUT);
pinMode(6, OUTPUT);
// initialize the piezo as output:
pinMode(Buzzer1, OUTPUT);
// initialize the pushbutton pin as an input:
pinMode(buttonPin2, INPUT_PULLUP);
pinMode(buttonPin3, INPUT_PULLUP);
pinMode(buttonPin4, INPUT_PULLUP);
pinMode(buttonPin5, INPUT_PULLUP);
}
void loop() {
rotaryMenu();
// carry out other loop code here
// initialize the piezo as output:
}
void rotaryMenu() { //This handles the bulk of the menu functions without needing to install/include/compile a menu library
//DEBUGGING: Rotary encoder update display if turned
if(oldEncPos != encoderPos) { // DEBUGGING
Serial.println(encoderPos);
analogWrite(9,encoderPos);
// DEBUGGING. Sometimes the serial monitor may show a value just outside modeMax due to this function. The menu shouldn't be affected.
oldEncPos = encoderPos;// DEBUGGING
}// DEBUGGING
// Button reading with non-delay() debounce - thank you Nick Gammon!
byte buttonState = digitalRead (buttonPin);
if (buttonState != oldButtonState){
if (millis () - buttonPressTime >= debounceTime){ // debounce
buttonPressTime = millis (); // when we closed the switch
oldButtonState = buttonState; // remember for next time
if (buttonState == LOW){
//Serial.println ("Button closed"); // DEBUGGING: print that button has been closed
buttonPressed = 1;
}
else {
//Serial.println ("Button opened"); // DEBUGGING: print that button has been opened
buttonPressed = 0;
}
} // end if debounce time up
//////////
} // end of state change
//Main menu section
const int Mode = 3;
if (Mode == 0) {
if (encoderPos > (modeMax+10)) encoderPos = modeMax; // check we haven't gone out of bounds below 0 and correct if we have
else if (encoderPos > modeMax) encoderPos = 0; // check we haven't gone out of bounds above modeMax and correct if we have
if (buttonPressed){
//Mode = encoderPos; // set the Mode to the current value of input if button has been pressed
Serial.print("Mode selected: "); //DEBUGGING: print which mode has been selected
Serial.println(Mode); //DEBUGGING: print which mode has been selected
buttonPressed = 0; // reset the button status so one press results in one action
if (Mode == 3) {
Serial.println("Mode 3"); //DEBUGGING: print which mode has been selected
encoderPos = setting3; // start adjusting Vmin from last set point
}
}
}
if (Mode == 3 && buttonPressed){
setting3 = encoderPos; // record whatever value your encoder has been turned to, to setting 3
digitalWrite(11,HIGH);
delay(100);
digitalWrite(11,LOW);
//setAdmin(3,setting3);
}
if(Mode==3){
buttonState2 = digitalRead(buttonPin2);
buttonState3 = digitalRead(buttonPin3);
buttonState4 = digitalRead(buttonPin4);
buttonState5 = digitalRead(buttonPin5);
//Serial.println(buttonState4);
// check if the pushbutton is pressed.
// if it is, the buttonState is HIGH:
if (buttonState2 == LOW) {
tone(Buzzer1,784,200);
//note G5
}
if (buttonState3 == LOW) {
tone(Buzzer1,349,200);
//note F4
}
if (buttonState4 == LOW) {
tone(Buzzer1,523,200);
// note C5
}
if (buttonState5 == LOW) {
tone(Buzzer1,330,200);
//note E4
}
}
}
// Carry out common activities each time a setting is changed
void setAdmin(byte name, byte setting){
Serial.print(" button pressed "); //DEBUGGING
encoderPos = 0; // reorientate the menu index - optional as we have overflow check code elsewhere
buttonPressed = 0; // reset the button status so one press results in one action
Mode = 3; // go back to top level of menu, now that we've set values
}
//Rotary encoder interrupt service routine for one encoder pin
void PinA(){
cli(); //stop interrupts happening before we read pin values
reading = PIND & 0xC; // read all eight pin values then strip away all but pinA and pinB's values
if(reading == B00001100 && aFlag) { //check that we have both pins at detent (HIGH) and that we are expecting detent on this pin's rising edge
encoderPos --; //decrement the encoder's position count
bFlag = 0; //reset flags for the next turn
aFlag = 0; //reset flags for the next turn
}
else if (reading == B00000100) bFlag = 1; //signal that we're expecting pinB to signal the transition to detent from free rotation
sei(); //restart interrupts
}
//Rotary encoder interrupt service routine for the other encoder pin
void PinB(){
cli(); //stop interrupts happening before we read pin values
reading = PIND & 0xC; //read all eight pin values then strip away all but pinA and pinB's values
if (reading == B00001100 && bFlag) { //check that we have both pins at detent (HIGH) and that we are expecting detent on this pin's rising edge
encoderPos ++; //increment the encoder's position count
bFlag = 0; //reset flags for the next turn
aFlag = 0; //reset flags for the next turn
}
else if (reading == B00001000) aFlag = 1; //signal that we're expecting pinA to signal the transition to detent from free rotation
sei(); //restart interrupts
}
Rotary Encoder controlling RGB LED and Blue LED/Limit switch and Buzzer
Javastatic int pinA = 2; // Our first hardware interrupt pin is digital pin 2
static int pinB = 3; // Our second hardware interrupt pin is digital pin 3
volatile byte aFlag = 0; // let's us know when we're expecting a rising edge on pinA to signal that the encoder has arrived at a detent
volatile byte bFlag = 0; // let's us know when we're expecting a rising edge on pinB to signal that the encoder has arrived at a detent (opposite direction to when aFlag is set)
volatile byte encoderPos = 0; //this variable stores our current value of encoder position. Change to int or uin16_t instead of byte if you want to record a larger range than 0-255
volatile byte oldEncPos = 0; //stores the last encoder position value so we can compare to the current reading and see if it has changed (so we know when to print to the serial monitor)
volatile byte reading = 0; //somewhere to store the direct values we read from our interrupt pins before checking to see if we have moved a whole detent
// Button reading, including debounce without delay function declarations
const byte buttonPin = 4; // this is the Arduino pin we are connecting the push button to
byte oldButtonState = HIGH; // assume switch open because of pull-up resistor
const unsigned long debounceTime = 10; // milliseconds
unsigned long buttonPressTime; // when the switch last changed state
boolean buttonPressed = 0; // a flag variable
// Menu and submenu/setting declarations
byte Mode = 0; // This is which menu mode we are in at any given time (top level or one of the submenus)
const byte modeMax = 3; // This is the number of submenus/settings you want
byte setting1 = 0; // a variable which holds the value we set
byte setting2 = 0; // a variable which holds the value we set
byte setting3 = 0; // a variable which holds the value we set
/* Note: you may wish to change settingN etc to int, float or boolean to suit your application.
Remember to change "void setAdmin(byte name,*BYTE* setting)" to match and probably add some
"modeMax"-type overflow code in the "if(Mode == N && buttonPressed)" section*/
const int buttonPin2 = 7; // the number of the pushbutton pin
const int buttonPin3 = 12; // the number of the pushbutton pin
const int buttonPin4 = 8; // the number of the pushbutton pin
const int buttonPin5 = 13; // the number of the pushbutton pin
const int Buzzer1 = 10;
// variables will change:
int buttonState2 = 0; // variable for reading the pushbutton status
int buttonState3 = 0; // variable for reading the pushbutton status
int buttonState4 = 0; // variable for reading the pushbutton status
int buttonState5 = 0; // variable for reading the pushbutton status
void setup() {
//Rotary encoder section of setup
pinMode(pinA, INPUT_PULLUP); // set pinA as an input, pulled HIGH to the logic voltage (5V or 3.3V for most cases)
pinMode(pinB, INPUT_PULLUP); // set pinB as an input, pulled HIGH to the logic voltage (5V or 3.3V for most cases)
attachInterrupt(0,PinA,RISING); // set an interrupt on PinA, looking for a rising edge signal and executing the "PinA" Interrupt Service Routine (below)
attachInterrupt(1,PinB,RISING); // set an interrupt on PinB, looking for a rising edge signal and executing the "PinB" Interrupt Service Routine (below)
// button section of setup
pinMode (buttonPin, INPUT_PULLUP); // setup the button pin
// DEBUGGING section of setup
Serial.begin(9600); // DEBUGGING: opens serial port, sets data rate to 9600 bps
pinMode(11, OUTPUT);
pinMode(9, OUTPUT);
pinMode(6, OUTPUT);
// initialize the piezo as output:
pinMode(Buzzer1, OUTPUT);
// initialize the pushbutton pin as an input:
pinMode(buttonPin2, INPUT_PULLUP);
pinMode(buttonPin3, INPUT_PULLUP);
pinMode(buttonPin4, INPUT_PULLUP);
pinMode(buttonPin5, INPUT_PULLUP);
}
void loop() {
rotaryMenu();
// carry out other loop code here
// initialize the piezo as output:
}
void rotaryMenu() { //This handles the bulk of the menu functions without needing to install/include/compile a menu library
//DEBUGGING: Rotary encoder update display if turned
if(oldEncPos != encoderPos) { // DEBUGGING
Serial.println(encoderPos);
analogWrite(9,encoderPos);
// DEBUGGING. Sometimes the serial monitor may show a value just outside modeMax due to this function. The menu shouldn't be affected.
oldEncPos = encoderPos;// DEBUGGING
}// DEBUGGING
// Button reading with non-delay() debounce - thank you Nick Gammon!
byte buttonState = digitalRead (buttonPin);
if (buttonState != oldButtonState){
if (millis () - buttonPressTime >= debounceTime){ // debounce
buttonPressTime = millis (); // when we closed the switch
oldButtonState = buttonState; // remember for next time
if (buttonState == LOW){
//Serial.println ("Button closed"); // DEBUGGING: print that button has been closed
buttonPressed = 1;
}
else {
//Serial.println ("Button opened"); // DEBUGGING: print that button has been opened
buttonPressed = 0;
}
} // end if debounce time up
//////////
} // end of state change
//Main menu section
const int Mode = 3;
if (Mode == 0) {
if (encoderPos > (modeMax+10)) encoderPos = modeMax; // check we haven't gone out of bounds below 0 and correct if we have
else if (encoderPos > modeMax) encoderPos = 0; // check we haven't gone out of bounds above modeMax and correct if we have
if (buttonPressed){
//Mode = encoderPos; // set the Mode to the current value of input if button has been pressed
Serial.print("Mode selected: "); //DEBUGGING: print which mode has been selected
Serial.println(Mode); //DEBUGGING: print which mode has been selected
buttonPressed = 0; // reset the button status so one press results in one action
if (Mode == 3) {
Serial.println("Mode 3"); //DEBUGGING: print which mode has been selected
encoderPos = setting3; // start adjusting Vmin from last set point
}
}
}
if (Mode == 3 && buttonPressed){
setting3 = encoderPos; // record whatever value your encoder has been turned to, to setting 3
digitalWrite(11,HIGH);
delay(100);
digitalWrite(11,LOW);
//setAdmin(3,setting3);
}
if(Mode==3){
buttonState2 = digitalRead(buttonPin2);
buttonState3 = digitalRead(buttonPin3);
buttonState4 = digitalRead(buttonPin4);
buttonState5 = digitalRead(buttonPin5);
//Serial.println(buttonState4);
// check if the pushbutton is pressed.
// if it is, the buttonState is HIGH:
if (buttonState2 == LOW) {
tone(Buzzer1,784,200);
//note G5
}
if (buttonState3 == LOW) {
tone(Buzzer1,349,200);
//note F4
}
if (buttonState4 == LOW) {
tone(Buzzer1,523,200);
// note C5
}
if (buttonState5 == LOW) {
tone(Buzzer1,330,200);
//note E4
}
}
}
// Carry out common activities each time a setting is changed
void setAdmin(byte name, byte setting){
Serial.print(" button pressed "); //DEBUGGING
encoderPos = 0; // reorientate the menu index - optional as we have overflow check code elsewhere
buttonPressed = 0; // reset the button status so one press results in one action
Mode = 3; // go back to top level of menu, now that we've set values
}
//Rotary encoder interrupt service routine for one encoder pin
void PinA(){
cli(); //stop interrupts happening before we read pin values
reading = PIND & 0xC; // read all eight pin values then strip away all but pinA and pinB's values
if(reading == B00001100 && aFlag) { //check that we have both pins at detent (HIGH) and that we are expecting detent on this pin's rising edge
encoderPos --; //decrement the encoder's position count
bFlag = 0; //reset flags for the next turn
aFlag = 0; //reset flags for the next turn
}
else if (reading == B00000100) bFlag = 1; //signal that we're expecting pinB to signal the transition to detent from free rotation
sei(); //restart interrupts
}
//Rotary encoder interrupt service routine for the other encoder pin
void PinB(){
cli(); //stop interrupts happening before we read pin values
reading = PIND & 0xC; //read all eight pin values then strip away all but pinA and pinB's values
if (reading == B00001100 && bFlag) { //check that we have both pins at detent (HIGH) and that we are expecting detent on this pin's rising edge
encoderPos ++; //increment the encoder's position count
bFlag = 0; //reset flags for the next turn
aFlag = 0; //reset flags for the next turn
}
else if (reading == B00001000) aFlag = 1; //signal that we're expecting pinA to signal the transition to detent from free rotation
sei(); //restart interrupts
}
Rotary Encoder that changes between two colors
Javastatic int pinA = 2; // Our first hardware interrupt pin is digital pin 2
static int pinB = 3; // Our second hardware interrupt pin is digital pin 3
volatile byte aFlag = 0; // let's us know when we're expecting a rising edge on pinA to signal that the encoder has arrived at a detent
volatile byte bFlag = 0; // let's us know when we're expecting a rising edge on pinB to signal that the encoder has arrived at a detent (opposite direction to when aFlag is set)
volatile byte encoderPos = 0; //this variable stores our current value of encoder position. Change to int or uin16_t instead of byte if you want to record a larger range than 0-255
volatile byte oldEncPos = 0; //stores the last encoder position value so we can compare to the current reading and see if it has changed (so we know when to print to the serial monitor)
volatile byte reading = 0; //somewhere to store the direct values we read from our interrupt pins before checking to see if we have moved a whole detent
// Button reading, including debounce without delay function declarations
const byte buttonPin = 4; // this is the Arduino pin we are connecting the push button to
byte oldButtonState = HIGH; // assume switch open because of pull-up resistor
const unsigned long debounceTime = 10; // milliseconds
unsigned long buttonPressTime; // when the switch last changed state
boolean buttonPressed = 0; // a flag variable
// Menu and submenu/setting declarations
byte Mode = 0; // This is which menu mode we are in at any given time (top level or one of the submenus)
const byte modeMax = 3; // This is the number of submenus/settings you want
byte setting1 = 0; // a variable which holds the value we set
byte setting2 = 0; // a variable which holds the value we set
byte setting3 = 0; // a variable which holds the value we set
/* Note: you may wish to change settingN etc to int, float or boolean to suit your application.
Remember to change "void setAdmin(byte name,*BYTE* setting)" to match and probably add some
"modeMax"-type overflow code in the "if(Mode == N && buttonPressed)" section*/
void setup() {
//Rotary encoder section of setup
pinMode(pinA, INPUT_PULLUP); // set pinA as an input, pulled HIGH to the logic voltage (5V or 3.3V for most cases)
pinMode(pinB, INPUT_PULLUP); // set pinB as an input, pulled HIGH to the logic voltage (5V or 3.3V for most cases)
attachInterrupt(0,PinA,RISING); // set an interrupt on PinA, looking for a rising edge signal and executing the "PinA" Interrupt Service Routine (below)
attachInterrupt(1,PinB,RISING); // set an interrupt on PinB, looking for a rising edge signal and executing the "PinB" Interrupt Service Routine (below)
// button section of setup
pinMode (buttonPin, INPUT_PULLUP); // setup the button pin
// DEBUGGING section of setup
Serial.begin(9600); // DEBUGGING: opens serial port, sets data rate to 9600 bps
pinMode(5, OUTPUT); // set pinA as an input, pulled HIGH to the logic voltage (5V or 3.3V for most cases)
pinMode(9, OUTPUT);
}
void loop() {
rotaryMenu();
// carry out other loop code here
}
void rotaryMenu() { //This handles the bulk of the menu functions without needing to install/include/compile a menu library
//DEBUGGING: Rotary encoder update display if turned
if(oldEncPos != encoderPos) { // DEBUGGING
Serial.println(encoderPos);
analogWrite(6,encoderPos);
analogWrite(5,encoderPos);
analogWrite(9,encoderPos);
// DEBUGGING. Sometimes the serial monitor may show a value just outside modeMax due to this function. The menu shouldn't be affected.
oldEncPos = encoderPos;// DEBUGGING
}// DEBUGGING
// Button reading with non-delay() debounce - thank you Nick Gammon!
byte buttonState = digitalRead (buttonPin);
if (buttonState != oldButtonState){
if (millis () - buttonPressTime >= debounceTime){ // debounce
buttonPressTime = millis (); // when we closed the switch
oldButtonState = buttonState; // remember for next time
if (buttonState == LOW){
Serial.println ("Button closed"); // DEBUGGING: print that button has been closed
buttonPressed = 1;
}
else {
Serial.println ("Button opened"); // DEBUGGING: print that button has been opened
buttonPressed = 0;
}
} // end if debounce time up
} // end of state change
//Main menu section
const int Mode = 3;
if (Mode == 0) {
if (encoderPos > (modeMax+10)) encoderPos = modeMax; // check we haven't gone out of bounds below 0 and correct if we have
else if (encoderPos > modeMax) encoderPos = 0; // check we haven't gone out of bounds above modeMax and correct if we have
if (buttonPressed){
//Mode = encoderPos; // set the Mode to the current value of input if button has been pressed
Serial.print("Mode selected: "); //DEBUGGING: print which mode has been selected
Serial.println(Mode); //DEBUGGING: print which mode has been selected
buttonPressed = 0; // reset the button status so one press results in one action
if (Mode == 1) {
Serial.println("Mode 1"); //DEBUGGING: print which mode has been selected
encoderPos = setting1; // start adjusting Vout from last set point
}
if (Mode == 2) {
Serial.println("Mode 2"); //DEBUGGING: print which mode has been selected
encoderPos = setting2; // start adjusting Imax from last set point
}
if (Mode == 3) {
Serial.println("Mode 3"); //DEBUGGING: print which mode has been selected
encoderPos = setting3; // start adjusting Vmin from last set point
}
}
}
if (Mode == 1 && buttonPressed) {
setting1 = encoderPos; // record whatever value your encoder has been turned to, to setting 3
setAdmin(1,setting1);
//code to do other things with setting1 here, perhaps update display
}
if (Mode == 2 && buttonPressed) {
setting2 = encoderPos; // record whatever value your encoder has been turned to, to setting 2
setAdmin(2,setting2);
//code to do other things with setting2 here, perhaps update display
}
if (Mode == 3 && buttonPressed){
setting3 = encoderPos; // record whatever value your encoder has been turned to, to setting 3
setAdmin(3,setting3);
//code to do other things with setting3 here, perhaps update display
}
}
// Carry out common activities each time a setting is changed
void setAdmin(byte name, byte setting){
Serial.print("Setting "); //DEBUGGING
Serial.print(name); //DEBUGGING
Serial.print(" = "); //DEBUGGING
Serial.println(setting);//DEBUGGING
encoderPos = 0; // reorientate the menu index - optional as we have overflow check code elsewhere
buttonPressed = 0; // reset the button status so one press results in one action
Mode = 3; // go back to top level of menu, now that we've set values
Serial.println("Main Menu"); //DEBUGGING
}
//Rotary encoder interrupt service routine for one encoder pin
void PinA(){
cli(); //stop interrupts happening before we read pin values
reading = PIND & 0xC; // read all eight pin values then strip away all but pinA and pinB's values
if(reading == B00001100 && aFlag) { //check that we have both pins at detent (HIGH) and that we are expecting detent on this pin's rising edge
encoderPos --; //decrement the encoder's position count
bFlag = 0; //reset flags for the next turn
aFlag = 0; //reset flags for the next turn
}
else if (reading == B00000100) bFlag = 1; //signal that we're expecting pinB to signal the transition to detent from free rotation
sei(); //restart interrupts
}
//Rotary encoder interrupt service routine for the other encoder pin
void PinB(){
cli(); //stop interrupts happening before we read pin values
reading = PIND & 0xC; //read all eight pin values then strip away all but pinA and pinB's values
if (reading == B00001100 && bFlag) { //check that we have both pins at detent (HIGH) and that we are expecting detent on this pin's rising edge
encoderPos ++; //increment the encoder's position count
bFlag = 0; //reset flags for the next turn
aFlag = 0; //reset flags for the next turn
}
else if (reading == B00001000) aFlag = 1; //signal that we're expecting pinA to signal the transition to detent from free rotation
sei(); //restart interrupts
}






_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.