#include <Wire.h>
#include <Adafruit_PWMServoDriver.h>
#include <IRremote2.h>
#include <LiquidCrystal.h>
int StartPos [3] = {0,-290,240};
int FourPos [6][7][3] = { { { 95,150, 65},{ 60,145, 75},{ 28,135, 70},{ 0,130, 70},{ -25,130, 70},{ -58,125, 75},{ -90,120, 65} }, //x,y,z
{ { 95,185, 70},{ 65,185, 70},{ 35,185, 70},{ 0,180, 70},{ -30,175, 70},{ -63,170, 65},{ -95,165, 65} },
{ { 95,210, 75},{ 65,220, 75},{ 35,220, 75},{ 0,208, 70},{ -30,213, 75},{ -65,208, 70},{-100,203, 70} },
{ { 95,250, 80},{ 65,250, 80},{ 35,245, 80},{ 0,245, 80},{ -28,245, 80},{ -63,245, 80},{ -97,235, 75} },
{ { 95,290, 90},{ 65,285, 90},{ 35,285, 90},{ 5,280, 90},{ -30,285, 90},{ -63,280, 90},{ -98,280, 90} },
{ {103,325,100},{ 68,325,100},{ 35,325,100},{ 5,320,100},{ -25,325,100},{ -63,323,100},{ -98,318, 90} }, };
#define SKILL 10
#define ROW 6
#define COLUMN 7
int board[ROW*COLUMN];
long int depth,skill;
unsigned long int nodes;
/* ---------- IR VARIABLE ---------- */
// RECV_PIN = 52;
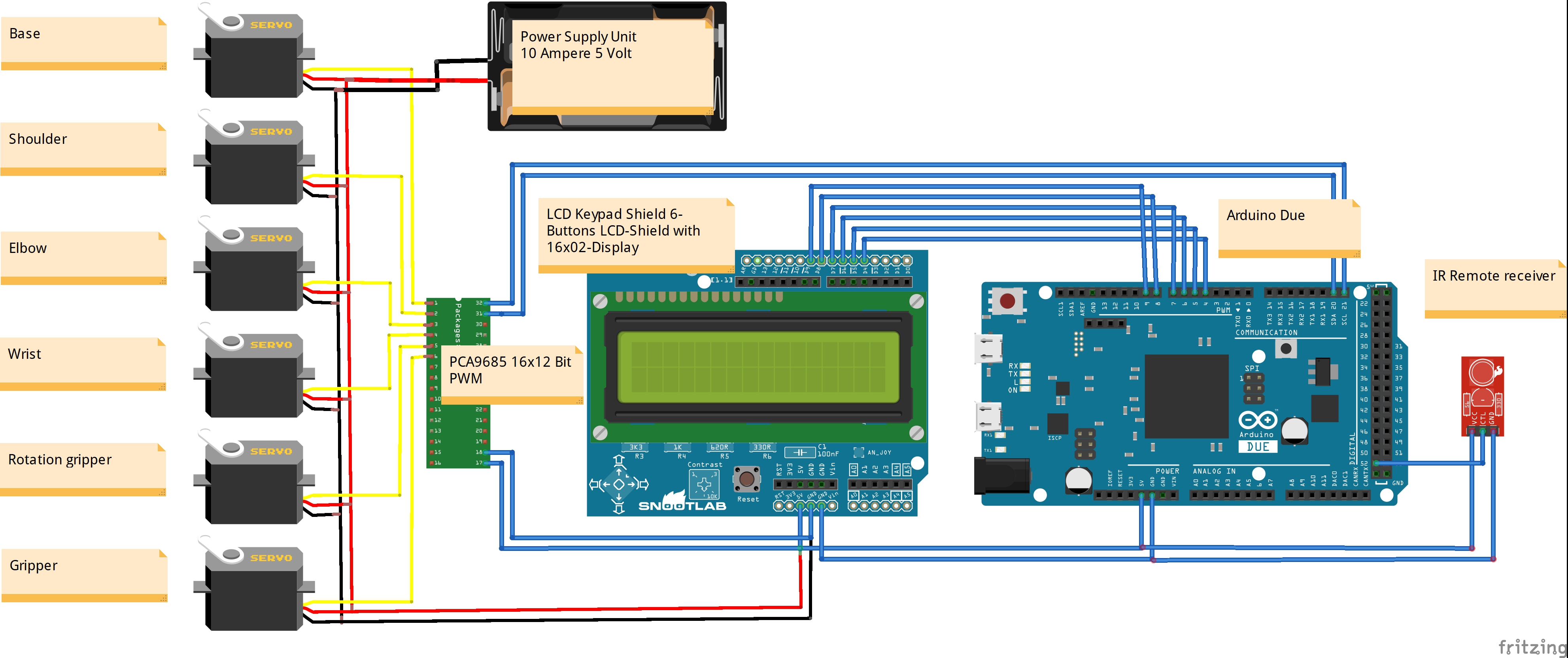
IRrecv irrecv(52);
decode_results results;
/* ---------- LIQUIDCRYSTAL VARIABLE ---------- */
// pin lcd: rs = 8, en = 9, d4 = 4, d5 = 5, d6 = 6, d7 = 7;
LiquidCrystal lcd(8, 9, 4, 5, 6, 7);
/* ---------- ROBOTIC ARM VARIABLE ---------- */
Adafruit_PWMServoDriver pwm = Adafruit_PWMServoDriver();
#define BASE_HGT 115 //base height
/*#define HUMERUS 105 shoulder-to-elbow "bone"
#define ULNA 100 elbow-to-wrist "bone"
#define GRIPPER 170 wrist-to-gripper "bone" */
#define SERVO1 1
#define SERVO2 2
#define SERVO3 3
#define SERVO4 4
#define SERVO5 5
#define SERVO6 6
#define SERVOMIN1 140
#define SERVOMAX1 475
#define SERVOMIN2 120
#define SERVOMAX2 415
#define SERVOMIN3 170
#define SERVOMAX3 465
#define SERVOMIN4 140
#define SERVOMAX4 485
#define SERVOMIN5 105
#define SERVOMAX5 415
#define SERVOMIN6 220
#define SERVOMAX6 355
unsigned int ServoMinMax[6][2] = {{SERVOMIN1,SERVOMAX1},
{SERVOMIN2,SERVOMAX2},
{SERVOMIN3,SERVOMAX3},
{SERVOMIN4,SERVOMAX4},
{SERVOMIN5,SERVOMAX5},
{SERVOMIN6,SERVOMAX6}};
float x1,x2,x3,x4,x5,x6 = 90; // servo position
float oldx1,oldx2,oldx3,oldx4,oldx5,oldx6 = x1; // old servo position
float xaxis = 0;
float yaxis = 150;
float zaxis = 100;
bool checkmin = true;
bool checkmax = true;
/* ---------- setup ---------- */
void setup() {
Serial.begin(115200);
randomSeed(analogRead(A0));
lcd.begin(16, 2);
lcd.clear();
lcd.print(">> 4 in a row <<");
lcd.setCursor(0,1);
lcd.print(" by Danny003");
delay(2000);
pwm.begin();
pwm.setPWMFreq(50);
MyServoWrite(SERVO2,90);
delay(1000);
Set_Arm(xaxis,yaxis,zaxis);
irrecv.enableIRIn();
lcd.clear();
delay(1000);
ShowWin();
delay(1000);
ShowDefeat();
delay(1000);
Set_Arm(xaxis,yaxis,zaxis);
lcd.print("Vuoi calibrare ? ");
lcd.setCursor(0,1);
lcd.print(" 1 = SI 0 = No");
if ( Read_RC() == 1 ) { CalibraPos() ; }
}
void loop() {
int move,j,i,coins;
coins = ROW*COLUMN;
skill = SKILL-5;
int choice = 0;
for (i=0; i<(ROW*COLUMN); i++) {board[i] = 0;}
lcd.clear();
lcd.print("Choose Who Start");
lcd.setCursor(0,1);
lcd.print("CH+=Comp CH-=You");
Serial.println("Choose Who Start");
Serial.println("CH+=Comp CH-=You");
choice = Read_RC();
if (choice==10) {
display_board();
while(coins!=0) {
if (coins==34) {skill=SKILL-4;} /* quick start */
if (coins==30) {skill=SKILL-3;} /* quick start */
if (coins==26) {skill=SKILL-2;} /* quick start */
if (coins==22) {skill=SKILL-1;} /* quick start */
if (coins==18) {skill=SKILL; } /* to maximum */
do {
lcd.clear();
lcd.print(" choose column ");
lcd.setCursor(0,1);
lcd.print(" from 1 to 7 ");
Serial.println("choose column [1-7]...");
move=Read_RC();
if (board[move-1]!=0) {
lcd.clear();
lcd.print("column is full");
Serial.println("column is full");
delay(500); }
if ((move<1)||(move>7)) {
lcd.clear();
lcd.print("column not valid");
Serial.println("column is not valid");
delay(500); }
} while((board[move-1]!=0)||(move<1)||(move>7));
lcd.clear();
lcd.print("You moved in ");
lcd.setCursor(13,0);
lcd.print(move);
lcd.setCursor(0,1);
lcd.print("I am thinking...");
move--;
j = ROW-1;
while ((board[move+j*COLUMN]!=0)&&(j>=0)) {j--;}
board[move+j*COLUMN] = 1;
coins--;
display_board();
if(checkwin(1,move,4)) {
lcd.clear();
lcd.print(" Player ");
lcd.setCursor(0,1);
lcd.print(" W I N S ");
Serial.println("You win\n");
ShowDefeat();
delay(3000);
break;
}
move = best_move(-1);
j = ROW-1;
while ((board[move+j*COLUMN]!=0)&&(j>=0)) {j--;}
board[move+j*COLUMN] = -1;
Reach_Position(StartPos[0],StartPos[1],StartPos[2],90+degrees(atan2(-StartPos[0],abs(StartPos[1]))),FourPos[j][move][0],FourPos[j][move][1],FourPos[j][move][2],90+degrees(atan2(-FourPos[j][move][0],abs(FourPos[j][move][1]))));
display_board();
lcd.clear();
lcd.print(" CPU move in ");
lcd.print(move+1);
Serial.println("CPU move in ");
Serial.print(move+1);
coins--;
if (checkwin(-1,move,4)) {
display_board();
lcd.clear();
lcd.print(" Computer ");
lcd.setCursor(0,1);
lcd.print(" W I N S ");
Serial.println("CPU wins\n");
ShowWin();
delay(3000);
break;
}
Serial.println("");
}
Serial.println("");
}
else if (choice == 11) {
display_board();
while(coins!=0) {
if (coins==34) skill=SKILL-4; /* quick start */
if (coins==30) skill=SKILL-3; /* quick start */
if (coins==26) skill=SKILL-2; /* quick start */
if (coins==22) skill=SKILL-1; /* quick start */
if (coins==18) skill=SKILL; /* ...to maximum */
if (coins==ROW*COLUMN) {move=(random(0,8));}
else { move = best_move(-1); }
j = ROW-1;
while ((board[move+j*COLUMN]!=0)&&(j>=0)) {j--;}
board[move+j*COLUMN] = -1;
display_board();
Reach_Position(StartPos[0],StartPos[1],StartPos[2],90+degrees(atan2(-StartPos[0],abs(StartPos[1]))),FourPos[j][move][0],FourPos[j][move][1],FourPos[j][move][2],90+degrees(atan2(-FourPos[j][move][0],abs(FourPos[j][move][1]))));
lcd.clear();
lcd.print(" CPU move in ");
lcd.print(move+1);
Serial.println("CPU move in ");
Serial.print(move+1);
coins--;
if (checkwin(-1,move,4)) {
display_board();
lcd.clear();
lcd.print(" Computer ");
lcd.setCursor(0,1);
lcd.print(" W I N S ");
Serial.println("CPU wins\n");
ShowWin();
delay(3000);
break;
}
Serial.println("");
do {
lcd.clear();
lcd.print(" choose column ");
lcd.setCursor(0,1);
lcd.print(" from 1 to 7 ");
Serial.println("choose column [1-7]...");
move=Read_RC();
if (board[move-1]!=0) {
lcd.clear();
lcd.print("column is full");
Serial.println("column is full");
delay(500);}
if ((move<1)||(move>7)) {
lcd.clear();
lcd.print("column not valid");
Serial.println("column is not valid");
delay(500);}
} while ((board[move-1]!=0)||(move<1)||(move>7));
lcd.clear();
lcd.print("You moved in ");
lcd.setCursor(13,0);
lcd.print(move);
lcd.setCursor(0,1);
lcd.print("I am thinking...");
move--;
j = ROW-1;
while ((board[move+j*COLUMN]!=0)&&(j>=0)) {j--;}
board[move+j*COLUMN] = 1;
coins--;
display_board();
if (checkwin(1,move,4)) {
Serial.println("You win\n");
lcd.clear();
lcd.print(" Player ");
lcd.setCursor(0,1);
lcd.print(" W I N S ");
ShowDefeat();
delay(3000);
break;
}
Serial.println("");
}
}
}
/* ---------- MyServoWrite ---------- */
/* This funciont is used to move a singular servo*/
void MyServoWrite(int servo, float gradi) {
pwm.setPWM( servo, 0, MapNew(gradi, 0.0, 180.0, ServoMinMax[servo-1][0], ServoMinMax[servo-1][1] ));
}
/* ---------- MyServoWriteAll ---------- */
/* This funciont is used to move the first 4 servo, it has been created to avoid to repeat the funciont MyServoWrite 4 times */
void MyServoWriteAll(float y1,float y2,float y3,float y4) {
pwm.setPWM( SERVO1, 0, MapNew(y1, 0.0, 180.0, ServoMinMax[SERVO1-1][0], ServoMinMax[SERVO1-1][1] ));
pwm.setPWM( SERVO2, 0, MapNew(y2, 0.0, 180.0, ServoMinMax[SERVO2-1][0], ServoMinMax[SERVO2-1][1] ));
pwm.setPWM( SERVO3, 0, MapNew(y3, 0.0, 180.0, ServoMinMax[SERVO3-1][0], ServoMinMax[SERVO3-1][1] ));
pwm.setPWM( SERVO4, 0, MapNew(y4, 0.0, 180.0, ServoMinMax[SERVO4-1][0], ServoMinMax[SERVO4-1][1] ));
}
/* ---------- MyServoWriteGradual ---------- */
/*This function is similar to MyServoWriteAll; but to avoid too rapid movement,
in particular when the robotic arm goes from a position to another one,this function creates
a smooth and simultaneous movement of the 4 servo, whose time depends on the variation of the bigger angle*/
void MyServoWriteGradual( float newpos1, float newpos2, float newpos3, float newpos4 ) {
float oldpos1 = oldx1;
float oldpos2 = oldx2;
float oldpos3 = oldx3;
float oldpos4 = oldx4;
float differ1 = newpos1 - oldpos1;
float differ2 = newpos2 - oldpos2;
float differ3 = newpos3 - oldpos3;
float differ4 = newpos4 - oldpos4;
float largest = max(abs(differ1),max(abs(differ2), max(abs(differ3),abs(differ4))));
for ( int i = 0; i <= largest; i++ ) {
oldpos1 += (differ1/largest);
oldpos2 += (differ2/largest);
oldpos3 += (differ3/largest);
oldpos4 += (differ4/largest);
MyServoWriteAll(oldpos1,oldpos2,oldpos3,oldpos4);
delay(10);
}
MyServoWriteAll(newpos1,newpos2,newpos3,newpos4);
}
/* ---------- Set_Arm ---------- */
/* This function is the most important for the movement of the robotic arm,
because it calculates the postions of the first 4 servo from the three coordinates x,y,z(taken from TakePos and TrisPos).
The following code is specific to the configuration of MY robotic arm, so if you want to use it, you have to adapt it to your arm.*/
void Set_Arm( float x, float y, float z) {
oldx1 = x1;
oldx2 = x2;
oldx3 = x3;
oldx4 = x4;
z = z-BASE_HGT;
float dist_y_z = sqrt( sq(z) + sq(x) + sq(y) );
if ( dist_y_z < 120.0 ) { checkmin=false; }
else { checkmin=true; }
if ( dist_y_z > 370.0 ) { checkmax=false; }
else { checkmax=true; }
if ( checkmin && checkmax ) {
float alfa = 180.0-(degrees(acos((-27500 + sqrt( sq(27500) - 71400*(14225 - sq(dist_y_z))))/71400)));
float gamma = degrees(acos((27875 -sq(dist_y_z) - (34000*cos(radians(alfa))))/(-210*dist_y_z)));
float omega = degrees(acos(sqrt(sq(x)+sq(y))/dist_y_z));
x1 = 90.0-degrees(atan2(-x,abs(y)));
if ( z > 0.0 ) { x2=180.0-(gamma+omega); }
else { x2=180.0-(gamma-omega); }
if ( y < 0.0) { x3=x4=(alfa-90.0); }
else {
x3=x4=(270.0-alfa);
x2=180.0-x2;
x1=180.0-x1;
}
if ((abs(oldx1-x1)+abs(oldx2-x2)+abs(oldx3-x3)+abs(oldx4-x4)) > 10.0) { MyServoWriteGradual(x1,x2,x3,x4); }
else { MyServoWriteAll(x1,x2,x3,x4); }
}
}
/* ---------- Reach_Position ---------- */
/*Through this function, the Robotic Arm grabs a pawn from a position and it leaves the pawn in another position */
void Reach_Position ( float fromx, float fromy, float fromz, float fromangle, float tox, float toy, float toz, float toangle ) {
Serial.println("test");
Serial.println(tox);
Serial.println(toy);
Serial.println(toz);
Serial.println(toangle);
Set_Arm( fromx, fromy+50, fromz+50.0 );
delay(300);
MyServoWrite( SERVO6, 0 );
MyServoWrite( SERVO5, fromangle );
delay(1000);
Set_Arm( fromx, fromy+50, fromz );
delay(300);
Set_Arm( fromx, fromy, fromz );
delay(300);
MyServoWrite( SERVO6, 165 );
delay(500);
Set_Arm( fromx, fromy+100, fromz );
delay(500);
Set_Arm( tox, toy, toz+150.0);
delay(500);
MyServoWrite( SERVO5, toangle );
delay(300);
Set_Arm( tox, toy, toz+50.0);
delay(500);
Set_Arm( tox, toy, toz );
delay(300);
MyServoWrite( SERVO6, 10 );
delay(500);
Set_Arm( tox, toy, toz + 50.0);
delay(500);
Set_Arm( xaxis = 0.0, yaxis = 130.0 , zaxis = 200.0 );
MyServoWrite( SERVO5, 90 );
}
/* ---------- MapNew ---------- */
/*This function has been created because the Arduino map() has not the funciont constrain() and it does not return a int value */
int MapNew( float x, float in_min, float in_max, float out_min, float out_max ) {
return round((constrain(x,in_min,in_max) - in_min) * (out_max - out_min) / (in_max - in_min) + out_min);
}
/* ---------- Check_Win ---------- */
/*This function check all the 8 possible combinations to win at tris. */
int checkwin(int player,int column,int lenght) {
long int j,r,l,i,height;
lenght--;
i = column;
j = ROW-1;
while(board[i+j*COLUMN]!=0) j--;
j++;
height = j;
r = 0;
l = 0;
while(((++i)<COLUMN)&&(board[i+j*COLUMN]==player)) r++;
i = column;
while(((--i)>=0)&&(board[i+j*COLUMN]==player)) l++;
if ((r+l)>=lenght) return 1;
i = column;
r = 0;
if((j<0)){r--;}
while(((++j)<ROW)&&(board[i+j*COLUMN]==player)) r++;
if (r>=lenght) return 1;
j = height;
r = 0;
l = 0;
while(((++i)<COLUMN)&&((++j)<ROW)&&(board[i+j*COLUMN]==player)) r++;
i = column;
j = height;
while(((--i)>=0)&&((--j)>=0)&&(board[i+j*COLUMN]==player)) l++;
if ((r+l)>=lenght) return 1;
i = column;
j = height;
r = 0;
l = 0;
while(((++i)<COLUMN)&&((--j)>=0)&&(board[i+j*COLUMN]==player)) r++;
i = column;
j = height;
while(((--i)>=0)&&((++j)<ROW)&&(board[i+j*COLUMN]==player)) l++;
if ((r+l)>=lenght) return 1;
return 0;
}
int extimated_value(int player) {
long int i,j,value,l;
value = 0;
for(l=2;l<4;l++)
{
for(i=0;i<COLUMN;i++)
{
if(checkwin(player,i,l)) value = value + l;
}
}
return value;
}
int goodness(int player,int depth,int column,int trigger) {
long int max,i,value,j;
max = -200;
if (checkwin(-player,column,4)) return -128;
if (depth==0) return 0;
for(i=0;i<COLUMN;i++)
{
if(board[i]==0)
{
j = ROW-1;
while(board[i+j*COLUMN]!=0) j--;
board[i+j*COLUMN] = player;
nodes++;
value = -goodness(-player,depth-1,i,-max)/2;
board[i+j*COLUMN] = 0;
if (value>max) max = value;
if (value>trigger) return max;
}
}
return max;
}
int best_move(int player)
{
long int i,j,max,value,best,same,trigger,old,att;
max = -100;
best = -1;
long int maxnodes = -1;
for(i=0;i<COLUMN;i++)
{
if(board[i]==0)
{
nodes = 0;
j = ROW-1;
while((board[i+j*COLUMN]!=0)&&(j>=0)) j--;
board[i+j*COLUMN] = player;
value = -goodness(-player,skill,i,200);
//printf("\nmove %d goodness: %d tree size for this move: %d nodes",i+1,value,nodes);
board[i+j*COLUMN] = 0;
if ((value == max) && (nodes>maxnodes)) {
maxnodes=nodes;
max = value;
best = i;}
if (value>max) {
maxnodes=nodes;
max = value;
best = i; }
}
}
if(best==-1)
{
for(i=0;i<COLUMN;i++) if(board[i]==0) return i;
}
return best;
}
/* ---------- Read_RC ---------- */
/* This function read the button you pressed */
int Read_RC(){
int returnvalue=99;
while (returnvalue==99){
while (!irrecv.decode(&results)) {};
switch(results.value){
case 0xFFA25D: returnvalue = 10; break; // CH-
case 0xFFE21D: returnvalue = 11; break; // CH+
case 0xFF6897: returnvalue = 0; break; // 0
case 0xFF30CF: returnvalue = 1; break; // 1
case 0xFF18E7: returnvalue = 2; break; // 2
case 0xFF7A85: returnvalue = 3; break; // 3
case 0xFF10EF: returnvalue = 4; break; // 4
case 0xFF38C7: returnvalue = 5; break; // 5
case 0xFF5AA5: returnvalue = 6; break; // 6
case 0xFF42BD: returnvalue = 7; break; // 7
case 0xFF4AB5: returnvalue = 8; break; // 8
case 0xFF52AD: returnvalue = 9; break; // 9
}
irrecv.resume();
}
return returnvalue;
}
void display_board(void) {
long int i,j;
Serial.println("");
for(j=0; j<ROW; j++) {
for(i=0; i<COLUMN; i++) {
if (board[i+j*COLUMN]== 1) {Serial.print("X ");}
if (board[i+j*COLUMN]==-1) {Serial.print("O ");}
if (board[i+j*COLUMN]== 0) {Serial.print(". ");}
}
Serial.println("");
}
for(i=0; i<(COLUMN*2)-1; i++) {Serial.print("-");}
Serial.println("");
for(i=0; i<COLUMN; i++) {Serial.print(i+1),Serial.print(" ");}
Serial.println("");
}
void CalibraPos() {
int scelta = 99;
int col,row;
while( scelta != 0 ) {
scelta = 99;
lcd.clear();
lcd.print(" Exit = 0 ");
lcd.setCursor(0,1);
lcd.print("cont. key not 0");
if (Read_RC()==0) {break;}
do {
lcd.clear();
lcd.print(" choose column ");
lcd.setCursor(0,1);
lcd.print(" from 1 to 7 ");
Serial.println("choose column [1-7]...");
col=Read_RC();
if((col<1)||(col>7)) {
lcd.clear();
lcd.print("column not valid");
Serial.println("column is not valid");
delay(500);}
} while((col<1)||(col>7));
do {
lcd.clear();
lcd.print(" choose row ");
lcd.setCursor(0,1);
lcd.print(" from 1 to 6 ");
Serial.println("choose row [1-6]...");
row=Read_RC();
if((row<1)||(row>6)) {
lcd.clear();
lcd.print("row not valid");
Serial.println("row is not valid");
delay(500);}
} while((row<1)||(row>6));
row--;
col--;
int calx = FourPos[row][col][0];
int caly = FourPos[row][col][1];
int calz = FourPos[row][col][2];
while (scelta!=10) {
lcd.clear();
lcd.print("CH+=OK CH-=Exit");
lcd.setCursor(0,1);
lcd.print("x= y= z= ");
lcd.setCursor(2,1);
lcd.print(calx);
lcd.setCursor(7,1);
lcd.print(caly);
lcd.setCursor(13,1);
lcd.print(calz);
scelta=Read_RC();
switch(scelta) {
case 1: calx--; break;
case 3: calx++; break;
case 4: caly--; break;
case 6: caly++; break;
case 7: calz--; break;
case 9: calz++; break;
case 11:
FourPos[row][col][0] = calx;
FourPos[row][col][1] = caly;
FourPos[row][col][2] = calz;
Reach_Position(StartPos[0],StartPos[1],StartPos[2],90+degrees(atan2(-StartPos[0],abs(StartPos[1]))),calx,caly,calz,90+degrees(atan2(-calx,abs(caly))));
break;
}
}
}
}
void ShowDefeat() {
Set_Arm(0,130,100);
for(int k=0; k<=180*2; k++) {
MyServoWrite(SERVO6, abs(180*sin(radians(k))));
delay(10);}
}
void ShowWin() {
Set_Arm(0,100,300);
for(int k=0; k<=180*3; k ++){
MyServoWrite(SERVO6, abs(180*sin(radians(k))));
delay(4);}}









{kind=link}
Comments
Please log in or sign up to comment.