You can control the car via an app using bluetooth! I thought it was pretty awesome.
This was my first arduino robot car project. I want to get better at building robots and eventually start building larger more advanced versions of my own. Eventually, I want to use this robot as a good proof of concept model in showing how feasible it can be to create many cheap robots to use for emergency situations (natural disaster, police scouts, etc).
Update 3/26/17:
New board
Moisture sensor
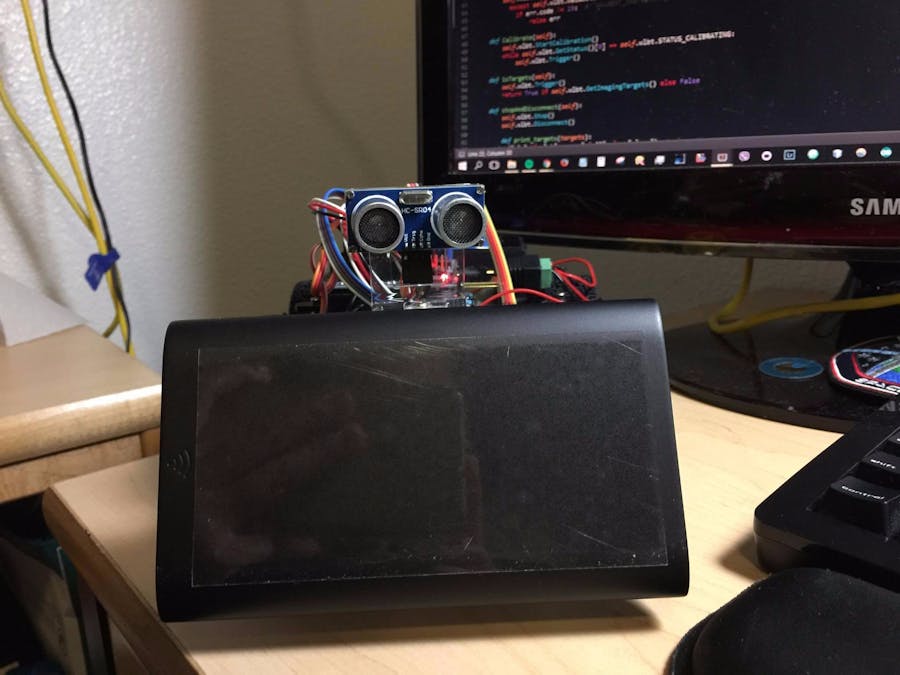
Update 5/14/17: It's a work in progress but I've mounted a Walabot Pro! It's amazing as it can give:
Go to https://walabot.com/getting-started to download their SDK for windows, linux, or raspberry pi (In my case, I had trouble getting set up with my raspberry pi 2).
into your CMD (assuming you're using windows), you may get an error. I spent a while before I figured out the problem. Firstly as a precautionary measure, I redownloaded python 3.7 https://www.python.org/downloads/ and was still confused as to why I couldn't verify my python version via CMD. I found out the command to initiate the python ide environment was actually
My main challenge right now is trying to bridge my arduino code for my robot to the python code for the Walabot. I've looked at forums and found from others that it's unlikely I'd be able to run python on an arduino. I'll have to move over to programming this in C++ or C# to combine my robot functions with the Walabot data.
I'm looking to get a sensor map running where the robot will navigate through a room and pinpoint every single object. I'd have more hypersonic sensors on board to record objects 360 degrees. I'd essentially have a sensor map with multiple points plotted on a graph to give myself a 2D visual representation of the room from a ground level.
I'm looking to pair my line tracking sensors with the Walabot Pro
A work in progress (needs more fixing) for the Walabot module to detect objects - figure out the distance between the robot and that object and record it on a plot plus confirming that it has seen that object before.
As I start to move away from the arduino INO language, I'll be using Johnny five JS to make this robot car more advanced. This file along with my .json file will be stored in a local directory and run so it can call Microsoft Azure services and authenticate to receive sensor data from my temperature/humidity sensors. Code credits to authors of BLE Bot 9000 project on Hackster.io and Microsoft.
// Copyright (c) Microsoft. All rights reserved.
// Licensed under the MIT license. See LICENSE file in the project root for full license information.
'use strict';// Azure IoT packages
var Protocol= require('azure-iot-device-http').Http;var Client= require('azure-iot-device').Client;var ConnectionString= require('azure-iot-device').ConnectionString;var Message= require('azure-iot-device').Message;var keypress= require('keypress');var five= require("johnny-five"),
board, motor, led;var BLESerialPort= require('ble-serial').SerialPort;var bleSerial= new BLESerialPort();var board= new five.Board({port: bleSerial, repl: false});var hostName='<IOTHUB_HOST_NAME>';var deviceId='<DEVICE_ID>';var sharedAccessKey='<SHARED_ACCESS_KEY>';// String containing Hostname, Device Id & Device Key in the following formats:
// "HostName=<iothub_host_name>;DeviceId=<device_id>;SharedAccessKey=<device_key>"var connectionString='HostName=' + hostName + ';DeviceId=' + deviceId + ';SharedAccessKey=' + sharedAccessKey;// Sensor data
var temperature= 0;var humidity= 0;var externalTemperature= 0;// Create IoT Hub client
var client= Client.fromConnectionString(connectionString, Protocol);// Helper function to print results for an operation
function printErrorFor(op){returnfunction printError(err){if(err) console.log(op + ' error: ' + err.toString());};}// Send device meta data
var deviceMetaData={'ObjectType': 'DeviceInfo',
'IsSimulatedDevice': 0,
'Version': '1.0',
'DeviceProperties': {'DeviceID': deviceId,
'HubEnabledState': 1,
'CreatedTime': '2015-09-21T20:28:55.5448990Z',
'DeviceState': 'normal',
'UpdatedTime': null,
'Manufacturer': 'Intel',
'ModelNumber': 'Edison',
'SerialNumber': '12345678',
'FirmwareVersion': '159',
'Platform': 'node.js',
'Processor': 'Intel',
'InstalledRAM': '64 MB',
'Latitude': 47.617025,
'Longitude': -122.191285
},
'Commands': [{'Name': 'SetTemperature',
'Parameters': [{'Name': 'Temperature',
'Type': 'double'}]},
{'Name': 'SetHumidity',
'Parameters': [{'Name': 'Humidity',
'Type': 'double'}]}]};board.on("ready", function(){ var temp= new five.Temperature({ pin: "A0",
controller: "GROVE"}); // --------------CONTROL.JS PART --------------------
//load atafruit motor shield configs
var configs= five.Motor.SHIELD_CONFIGS.ADAFRUIT_V2; //create each motor
var motor1= new five.Motor(configs.M1); var motor2= new five.Motor(configs.M2); var motor3= new five.Motor(configs.M3); var motor4= new five.Motor(configs.M4); //set high level drive functions
function forward(speed){ motor1.reverse(speed); motor2.forward(speed); motor3.forward(speed); motor4.reverse(speed);}function reverse(speed){ motor1.forward(speed); motor2.reverse(speed); motor3.reverse(speed); motor4.forward(speed);}function left(speed){ motor1.forward(speed); motor2.forward(speed); motor3.forward(speed); motor4.forward(speed);}function right(speed){ motor1.reverse(speed); motor2.reverse(speed); motor3.reverse(speed); motor4.reverse(speed);}function stop(){ motor1.stop(); motor2.stop(); motor3.stop(); motor4.stop();} // make `process.stdin` begin emitting "keypress" events
keypress(process.stdin); // listen for the "keypress" event
process.stdin.on('keypress', function(ch, key){ console.log('got "keypress"', key); //make it so you can close the process with ctrl-c...
if(key && key.ctrl && key.name =='c'){ process.exit();}if(key && key.name =='w'){ forward(255); console.log('forward command');}if(key && key.name =='s'){ reverse(255); console.log('reverse command');}if(key && key.name =='a'){ left(255); console.log('left command');}if(key && key.name =='d'){ right(255); console.log('right command');}if(key && key.name =='q'){ stop(); console.log('stop');}}); process.stdin.setRawMode(true);// ------------------- End Control.js ----------------------
client.open(function(err, result){if(err){ printErrorFor('open')(err);}else{ console.log('Sending device metadata:\n' + JSON.stringify(deviceMetaData)); client.sendEvent(new Message(JSON.stringify(deviceMetaData)), printErrorFor('send metadata')); client.on('message', function(msg){ console.log('receive data: ' + msg.getData()); try { var command= JSON.parse(msg.getData()); switch (command.Name){case'SetTemperature':
temperature= command.Parameters.Temperature; console.log('New temperature set to :' + temperature + 'F'); client.complete(msg, printErrorFor('complete')); break;case'SetHumidity':
humidity= command.Parameters.Humidity; console.log('New humidity set to :' + humidity + '%'); client.complete(msg, printErrorFor('complete')); break; default:
console.error('Unknown command: ' + command.Name); client.reject(msg, printErrorFor('complete')); break;}} catch (err){ printErrorFor('parse received message')(err); client.reject(msg, printErrorFor('reject'));}}); // start event data send routing
var sendInterval= setInterval(function(){temperature= temp.celsius; var data= JSON.stringify({'DeviceID': deviceId,
'Temperature': temperature,
'Humidity': humidity,
'ExternalTemperature': externalTemperature
}); console.log('Sending device event data:\n' + data); client.sendEvent(new Message(data), printErrorFor('send event'));}, 1000); client.on('error', function(err){ printErrorFor('client')(err);if(sendInterval) clearInterval(sendInterval); client.close();});}});});
Json File that goes along with the .js file
JavaScript
Code credits to Microsoft
{"name": "azure-samples-node-edison-rm",
"version": "0.0.1",
"private": true,
"description": "Remote monitoring sample demonstrating how to use the Azure IoT device SDK for Node.js on the Intel Edison",
"author": "Microsoft Corp.",
"license": "MIT",
"dependencies": {"azure-iot-common": "1.0.2",
"azure-iot-device": "1.0.2",
"azure-iot-device-amqp": "1.0.2",
"azure-iot-device-http": "1.0.2",
"azure-iot-device-mqtt": "1.0.2",
"edison-io": "^0.9.4",
"johnny-five": "^0.9.33"},
"devDependencies": {"jshint": "^2.8.0"},
"scripts": {"lint": "jshint --show-non-errors .",
"test": "npm -s run lint"}}
Old Arduino code for obstacle avoidance
Arduino
Utilizing the ultrasonic sensor to move the robot around based on obstacles. Code credits to Elegoo
#include<Servo.h> //servo libraryServomyservo;// create servo object to control servointEcho=A4;intTrig=A5;intin1=6;intin2=7;intin3=8;intin4=9;intENA=5;intENB=10;intABS=110;intrightDistance=0,leftDistance=0,middleDistance=0;void_mForward(){analogWrite(ENA,ABS);analogWrite(ENB,ABS);digitalWrite(in1,LOW);digitalWrite(in2,HIGH);digitalWrite(in3,LOW);digitalWrite(in4,HIGH);Serial.println("go forward!");}void_mBack(){analogWrite(ENA,ABS);analogWrite(ENB,ABS);digitalWrite(in1,HIGH);digitalWrite(in2,LOW);digitalWrite(in3,HIGH);digitalWrite(in4,LOW);Serial.println("go back!");}void_mleft(){analogWrite(ENA,ABS);analogWrite(ENB,ABS);digitalWrite(in1,LOW);digitalWrite(in2,HIGH);digitalWrite(in3,HIGH);digitalWrite(in4,LOW);Serial.println("go left!");}void_mright(){analogWrite(ENA,ABS);analogWrite(ENB,ABS);digitalWrite(in1,HIGH);digitalWrite(in2,LOW);digitalWrite(in3,LOW);digitalWrite(in4,HIGH);Serial.println("go right!");}void_mStop(){digitalWrite(ENA,LOW);digitalWrite(ENB,LOW);Serial.println("Stop!");}/*Ultrasonic distance measurement Sub function*/intDistance_test(){digitalWrite(Trig,LOW);delayMicroseconds(2);digitalWrite(Trig,HIGH);delayMicroseconds(20);digitalWrite(Trig,LOW);floatFdistance=pulseIn(Echo,HIGH);Fdistance=Fdistance/58;return(int)Fdistance;}voidsetup(){myservo.attach(3);// attach servo on pin 3 to servo objectSerial.begin(9600);pinMode(Echo,INPUT);pinMode(Trig,OUTPUT);pinMode(in1,OUTPUT);pinMode(in2,OUTPUT);pinMode(in3,OUTPUT);pinMode(in4,OUTPUT);pinMode(ENA,OUTPUT);pinMode(ENB,OUTPUT);_mStop();}voidloop(){myservo.write(90);//setservo position according to scaled valuedelay(500);middleDistance=Distance_test();#ifdef sendSerial.print("middleDistance=");Serial.println(middleDistance);#endifif(middleDistance<=20){_mStop();delay(500);myservo.write(5);delay(1000);rightDistance=Distance_test();#ifdef sendSerial.print("rightDistance=");Serial.println(rightDistance);#endifdelay(500);myservo.write(90);delay(1000);myservo.write(180);delay(1000);leftDistance=Distance_test();#ifdef sendSerial.print("leftDistance=");Serial.println(leftDistance);#endifdelay(500);myservo.write(90);delay(1000);if(rightDistance>leftDistance){_mright();delay(180);}elseif(rightDistance<leftDistance){_mleft();delay(180);}elseif((rightDistance<=20)||(leftDistance<=20)){_mBack();delay(180);}else{_mForward();}}else_mForward();}



_copy_P5AWOdT4dX.png?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)
_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)
_baVEVgguW1.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)






Comments
Please log in or sign up to comment.