Motivation:During this covid situation, we are taking a lot of precautions to save ourselves from coronavirus, but there are high chances of carelessness which might lead to consequences.The idea behind this project was basically to reduce the spread of the virus, when someone enters our home the first thing that comes in contact with that person is our doorbell, and it's not always possible to sanitize everything around us. So why not transform our traditional bell into a contactless bell, which eliminates the contact and hence reduces the chances of spread.
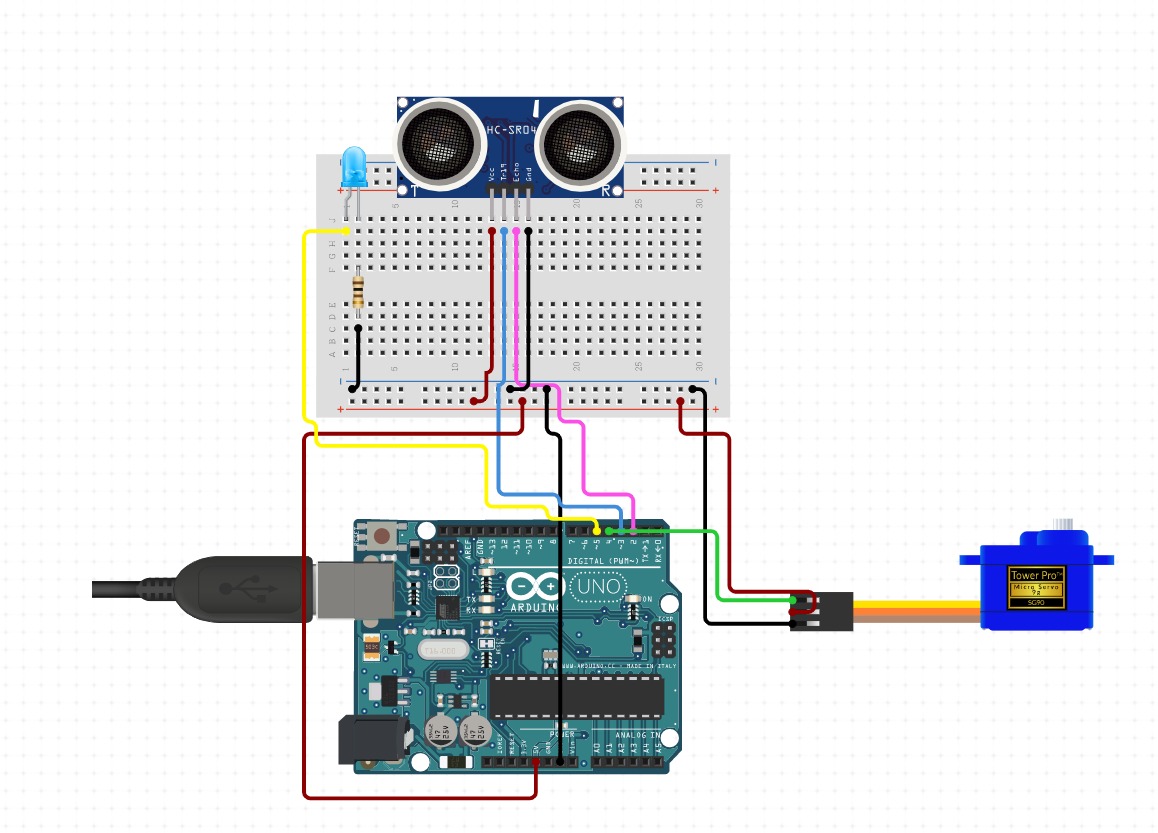
Working:Whenever a person arrives at our home, so instead of pressing the bell, the person can raise hand at a distance of around 10cm so that the ultrasonic sensor can sense the presence a person and bell will ring automatically using servo motor without any touch to the bell.The plus point of the solution is that the solution can be applied to our existing doorbells.


_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)

















{kind=link}
Comments
Please log in or sign up to comment.