IDEA:In today’s scenario, dense network of city streets, disaster prone regions and war prone environments have common navigational difficulties. Specific missions, hazardous surroundings, inhabitable condition serve as a reason for shift to autonomous technology and decision oriented mechanics. It is well known that the idea of decision making algorithms, for application like maze solving leads an entrance to a goal, regardless of the challenge of the maze solving being three centuries old, it still hold a vital importance in robotics. If a robot is positioned in an unfamiliar environment, it should have a good decision making algorithm in order to successfully solve a maze, so to design a robot we are using LSRB algorithm.
WORKING:Algorithm:Maze solving robot is one of the most popular autonomous robots.Our maze solving robot make multiple runs in the maze, first it creates a map of maze layout and store it in its memory, then run through a shortest path, this is done through LSRBalgorithm.The robot will take its direction by following either left or right wall, In our robot we are using LSRB algorithm it states that when there is an intersection, turn left if you can, else go straight if you can, else turn right if you can, else turn around because you are at dead end.A program/algorithm must be deployed and able to guide the robot to the end of maze using ANSI C.
In this way this will respond faster and reaches the end in minimum possible time.
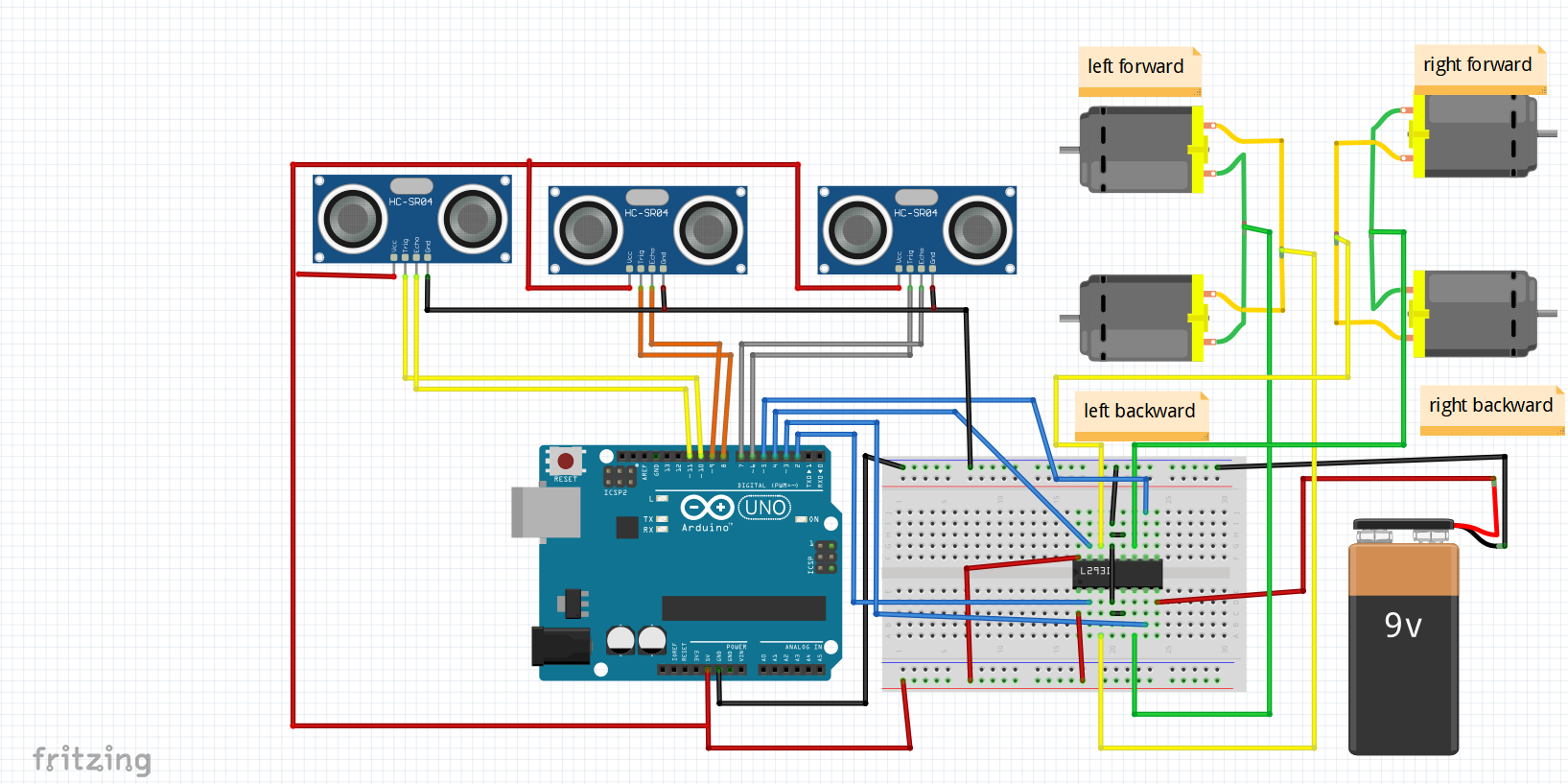
Hardware:In our robot we are using Arduino Uno board, it acts as the brain of our robot because all the decisions which is taken by the robot to solve the maze is governed by this board and three ultrasonic sensors are used to take the input. The robot is capable of scanning the obstacles with the help of ultrasonic sensors; they transmit ultrasonic waves from its sensor head and again receive the waves reflected back from the object. By measuring the delay of time from the transmission to reception of sonic wave, it detects the position of the object or wall. And then move according to the algorithm avoiding all the obstacles and reach the final destination. Also this robot has a special feature of navigating through human control for that we are using Bluetooth module, this feature can be used in extreme cases when there is a requirement of human control decision making.
Applications:Applications of such autonomous vehicles range from simple tasks like robots employed in industries to carry goods through factories, military purposes, mining, offices, also buildings to detect dangerous or difficult areas like bomb sniffing, finding humans in wreckage etc.




_ztBMuBhMHo.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)


















_3u05Tpwasz.png?auto=compress%2Cformat&w=40&h=40&fit=fillmax&bg=fff&dpr=2)
{kind=link}
Comments
Please log in or sign up to comment.