MOTIVATION:Where Do Plastic Water Bottles End Up?
In landfills, floating on oceans, or rivers and on sidewalks. It was approximated that 46, 000 pieces of plastic trash are floating on the ocean per square mile. This plastic is killing animals, leaking chemicals and disrupting ecosystems. Each bottle can take up to one thousand years to decompose, leaking dangerous and harmful chemicals during the process. Some toxins leaked could cause cancer and reproductive disabilities. Burning of plastic generates toxic emissions such as carbon monoxide, chlorine, hydrochloride acid, fur-ans, and nitrites. Unfortunately, the argument of recycling can only do so little for its case since only 12% out of the thirty-five billion bottles use din one year gets recycled, indicating that only half of what you place in a recycle bin actually gets recycled.
IDEA:A smart machine for plastic and metal waste disposal is a system which accepts Plastic wastes (bottles) and metal cans for recycling and in return dispenses pints in the wallet to the operator who recycles the waste. The reverse vending machine is equipped with proximity sensor to distinguish between different kinds of bottles and the points are gained when the user enter the code in the website.This invention relates in general to waste management and recycling the plastic and metal waste (bottles) in the environment. The littering of plastic wastes in the environment and less willingness to recycle the plastic presents a continuing problem to environment and to all the living beings.
WORKING:A Reverse Vending Machine is a device that accepts used beverage containers and returns money to the user (the reverse of the typical vending cycle). The machines are popular in places that have mandatory recycling laws or container deposit legislation.
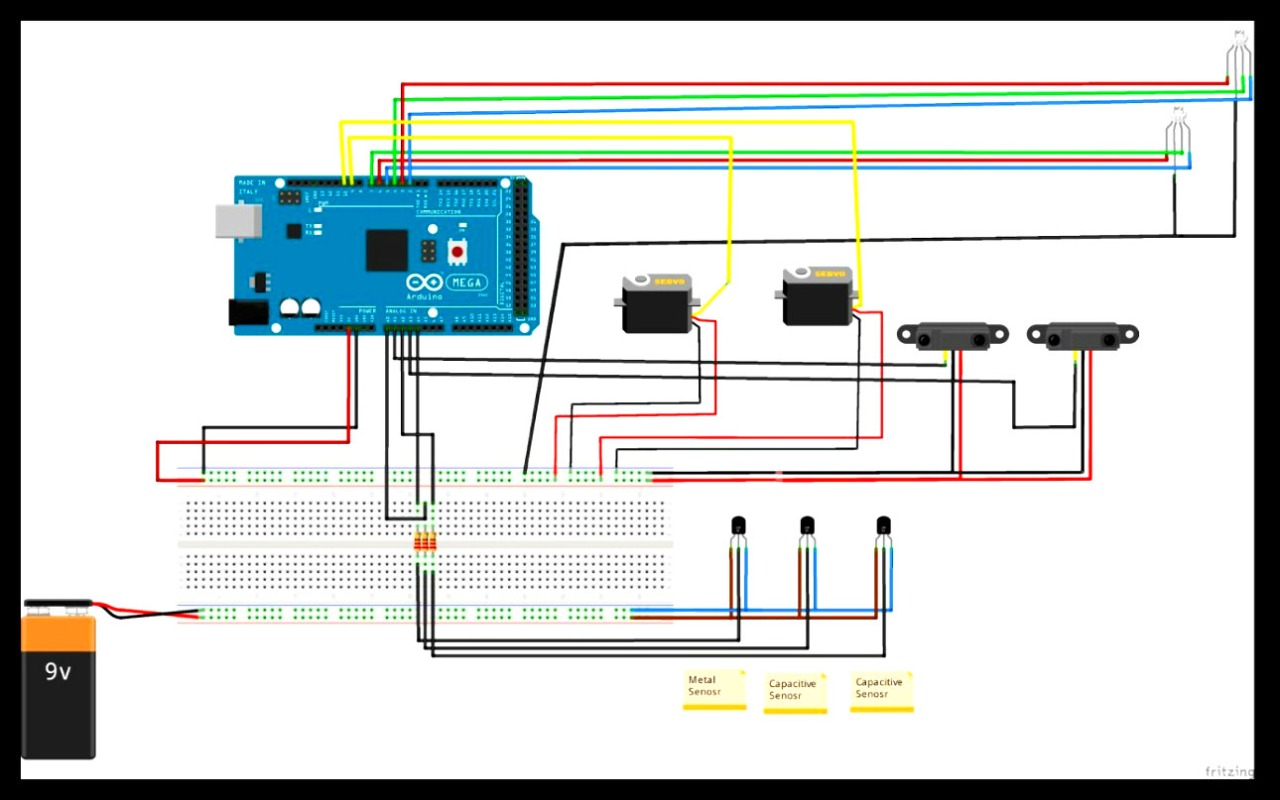
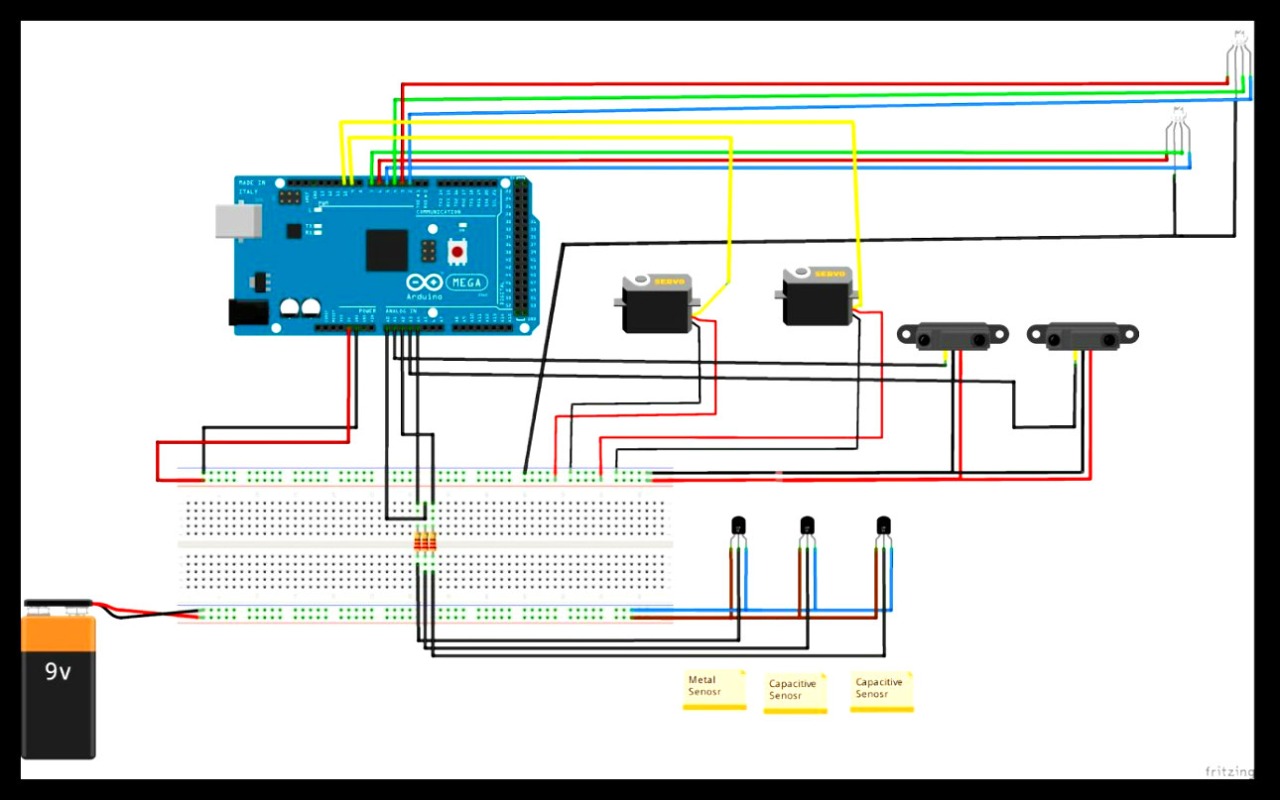
The basic operations involve steps where the recycler places the empty bottle/can into the receiving aperture; the horizontal in-feed system allows the user to insert containers one at a time. The bottle/can is then automatically scanned with the help of capacitive and inductive proximity sensors. If the sensor value of inductive sensor is 1 then the object is plastic and if the sensor value of inductive sensor is 0and capacitive sensor value is 1 then the object is plastic.
As for the reward system, RVM distributes valuable tokens, like coins or coupons, when beverage containers are recycled. The coupons are then used to redeem gifts at the counter. However, the awareness of environmental issues and the aim of reducing paper usage, the printing of coupons is not highly favored. So, in our proposed system as the plastic is detected an encrypted code appears on LCD screen. Then the user has to scan the OR code present on the machine to navigate to the website to redeem his points by entering the code he got on the LCD screen.
There is a database for the user who has an account in the website of reverse plastic vending machine. It is compulsory to have a account to login in the website to redeem the points for disposing plastic.
The machine has one more feature, if the machine is full then the garbage collectors or recycle vendors and notified with the help of an application. The level of machine is monitored using ultrasonic sensor and NodeMCU as the machine is full the collectors are informed and the exact location of machine is sent by the help of global positioning system.



_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)




























{kind=link}
Comments
Please log in or sign up to comment.