/*
created by Boris Dusnoki, https://www.youtube.com/channel/UCgOEgQpu1thY7D-GzO5vdeQ
Distance Sensor with graph and variable sound frequency and delay
*/
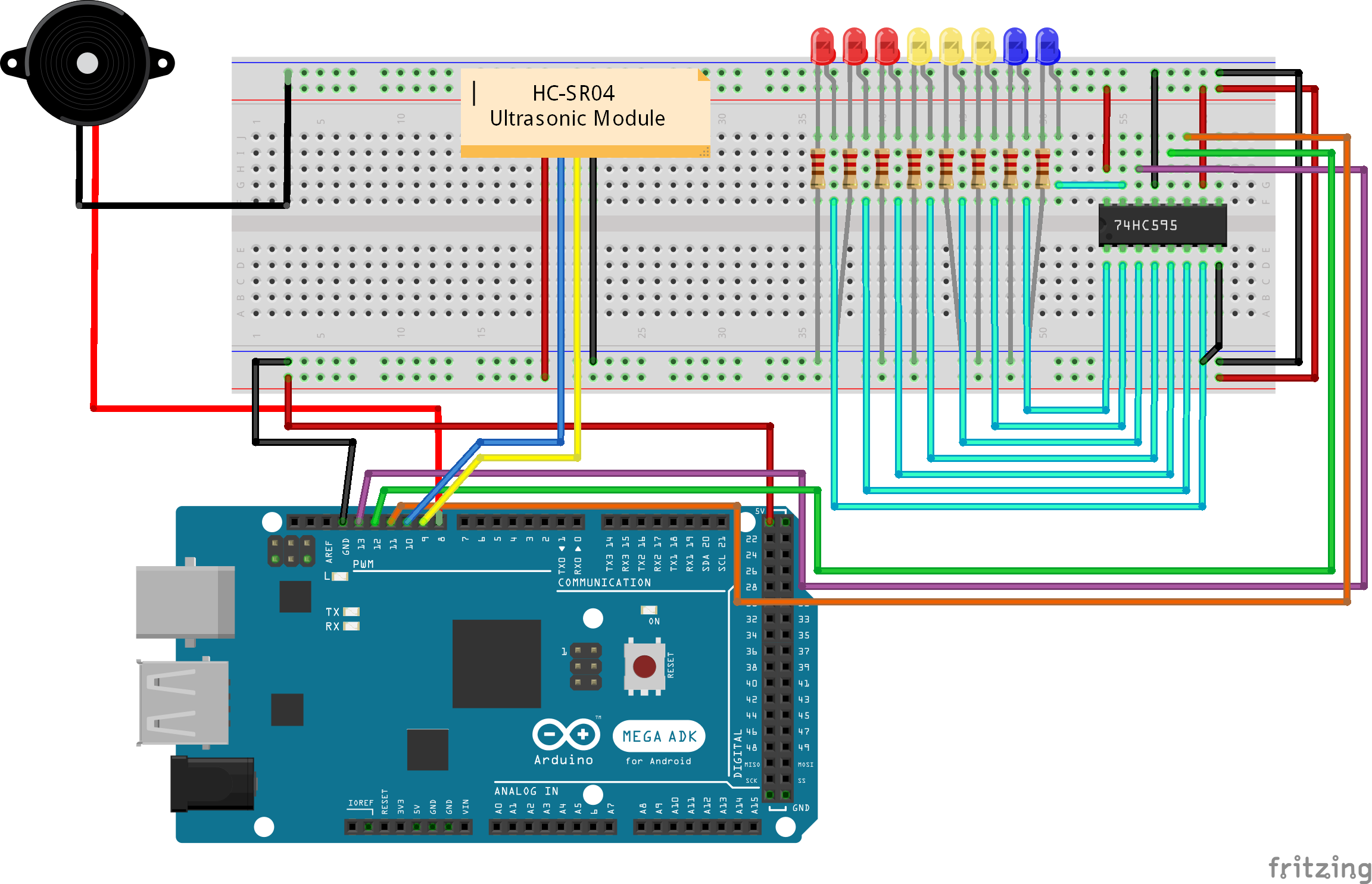
int tonePin = 8; // buzzer pin
int trigPin = 9; // sensor trigger pin
int echoPin = 10; // sensor echo pin
int clockPin = 11; // shift register clock pin
int latchPin = 12; // shift register latch pin
int dataPin = 13; // shift register data pin
unsigned long previousMillisLEDS = 0; // initialization of the previosMillis for LEDS
unsigned long previousMillisLOW = 0; // initialization of the previosMillis for LOW distance buzzer
unsigned long previousMillisMID = 0; // initialization of the previosMillis for MED distance buzzer
unsigned long previousMillisHIGH = 0; // initialization of the previosMillis for HIGH distance buzer
const int intervalLEDS = 100; // interval of refreshing the LEDS state
const int intervalLOW = 800; // interval of the LOW distance buzzer
const int intervalMID = 400; // interval of the MED distance buzzer
const int intervalHIGH = 100; // interval of the HIGH distance buzzer
const int freqLOW = 1500; // frequency of the LOW distabce buzzer
const int freqMID = 1800; // frequency of the MED distabce buzzer
const int freqHIGH = 2000; // frequency of the HIGH distabce buzzer
const int durLOW = 100; // on time of the LOW distabce buzzer
const int durMED = 100; // on time of the MED distabce buzzer
const int durHIGH = 80; // on time of the HIGH distabce buzzer
const byte patterns[9] = { // initialization of the patterns the LEDS are going to display
B00000000, // all LEDS OFF
B00000001, // 1 LED ON
B00000011, // 2 LEDS ON
B00000111, // 3 LEDS ON
B00001111, // 4 LEDS ON
B00011111, // 5 LEDS ON
B00111111, // 6 LEDS ON
B01111111, // 7 LEDS ON
B11111111, // 8 LEDS ON
};
int prox = 0; // initialization of the proximity value (0-8)
int dur; // initialization of the duration between the Trigger and Echo signal of the sensor
int dist; // initialization of the distance between the sensor and the object in front of it (in centimeters)
void setup() {
pinMode(tonePin, OUTPUT); // set tone pin to OUTPUT
pinMode(trigPin, OUTPUT); // set trigger pin to OUTPUT
pinMode(echoPin, INPUT); // set echo pin to INPUT
pinMode(clockPin, OUTPUT); // set clock pin to OUTPUT
pinMode(latchPin, OUTPUT); // set latch pin to OUTPUT
pinMode(dataPin, OUTPUT); // set data pin to OUTPUT
}
void loop() {
unsigned long currentMillis = millis(); // set the currentMillis variable to the current number of milliseconds from the start of the loop
if ((unsigned long)(currentMillis - previousMillisLEDS) >= intervalLEDS) { // check if the time between the current time and previous time for LEDS is larger or equal to the interval the LEDS should stay on
digitalWrite(latchPin, LOW); // set the latch pin to LOW
digitalWrite(trigPin, LOW); // set the trigger pin to LOW
delayMicroseconds(2); // delay 2 microseconds
digitalWrite(trigPin, HIGH); // set the trigger pin to HIGH and send out a sound signal
delayMicroseconds(100); // delay 100 microseconds
digitalWrite(trigPin, LOW); // set the trigger pin to LOW
dur = pulseIn(echoPin, HIGH); // caluclate the duration between the trigger and echo
dist = dur / 2 / 29; // calculate distance in centemeters based on the speed of sound
prox = map(dist, 0, 48, 8, 0); // map the distannce between 0 and 48 cm to a value between 0 and 8
shiftOut(dataPin, clockPin, MSBFIRST, patterns[prox]); // send the pattern to the shift register based on the prox value (0-8)
digitalWrite(latchPin, HIGH); // latch the shift register
previousMillisLEDS = currentMillis; // set the previousMillis for LEDS to the current time in milliseconds from the start of the loop
}
if (prox < 0) { // if we get a proximity value less than 0 set it to 0
prox = 0;
}
else if (prox == 6) { // if we get a proximity value of 6
if ((unsigned long)(currentMillis - previousMillisLOW) >= intervalLOW) { // check if the time between the current time and previous time for LOW buzzer interal is larger or equal to the interval the buzzer should stay on
tone(tonePin, freqLOW, 100); // set the tone pin to the LOW frequency and an on time of 100 milliseconds
previousMillisLOW = currentMillis; // set the previousMillis for LOW buzzer interal to the current time in milliseconds from the start of the loop
}
}
else if (prox == 7) { // if we get a proximity value of 7
if ((unsigned long)(currentMillis - previousMillisMID) >= intervalMID) { // check if the time between the current time and previous time for MID buzzer interal is larger or equal to the interval the buzzer should stay on
tone(tonePin, freqMID, 100); // set the tone pin to the MID frequency and an on time of 100 milliseconds
previousMillisMID = currentMillis; // set the previousMillis for MID buzzer interal to the current time in milliseconds from the start of the loop
}
}
else if (prox == 8) { // if we get a proximity value of 8
if ((unsigned long)(currentMillis - previousMillisHIGH) >= intervalHIGH) { // check if the time between the current time and previous time for HIGH buzzer interal is larger or equal to the interval the buzzer should stay on
tone(tonePin, freqHIGH, 80); // set the tone pin to the HIGH frequency and an on time of 80 milliseconds
previousMillisHIGH = currentMillis; // set the previousMillis for HIGH buzzer interal to the current time in milliseconds from the start of the loop
}
}
}




_wzec989qrF.jpg?auto=compress%2Cformat&w=48&h=48&fit=fill&bg=ffffff)






{kind=link}
Comments
Please log in or sign up to comment.